3.Выделение зон затухания и возрастания амплитуды автоколебаний нелинейных систем до установившегося значения.
Рассмотрим релейную следящую систему со структурной схемой, изображенной на рис.27.1.
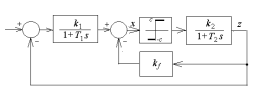 Передаточная
функция линейной части релейной следящей
системы
Передаточная
функция линейной части релейной следящей
системы .
.
Согласно
схеме расчета переходного процесса,
запишем дифференциальное уравнение
замкнутой линеаризованной системы
 .(27.6)
.(27.6)
При
идеальной релейной характеристике
нелинейного элемента, как мы видели
(см. лекцию 23, формула (23.7)), .(27.7)
.(27.7)
Подставив
вместо
 ,
получим соотношения вида (27.5) для
построения линий постоянных частот и
постоянных коэффициентов затухания. В
частности, при
,
получим соотношения вида (27.5) для
построения линий постоянных частот и
постоянных коэффициентов затухания. В
частности, при имеем
имеем
Исключая
частоту
, получаем связь между параметрами
системы вдоль линии нулевого затухания
переходных процессов
 (27.8)
(27.8)
Найдем
отсюда зависимость амплитуды установившихся
колебаний от коэффициента усиления k1.
Используя явный вид (27.7) линеаризованной
характеристики реле, получаем из (27.8) .
.
Как
видим, получилась линейная зависимость.
Заметим однако, что амплитуда установившихся
колебаний не может быть отрицательной,
поэтому при
 амплитуда должна быть равной нулю, т.е.
переходные процессы при различных
начальных условиях должны затухать до
нуля. Другими словами при таком низком
значении коэффициента усиления система
обладает устойчивым состоянием
равновесия.
амплитуда должна быть равной нулю, т.е.
переходные процессы при различных
начальных условиях должны затухать до
нуля. Другими словами при таком низком
значении коэффициента усиления система
обладает устойчивым состоянием
равновесия.
Выполним
расчет при следующих значениях параметров:

Следовательно,
граница нулевого затухания определяется
формулой (график на рис.27.2)
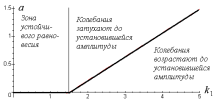 Рис.27.2.Диаграмма
качества переходных процессов.
Рис.27.2.Диаграмма
качества переходных процессов.
Приближенный
метод не дает точной зависимости
переходного процесса от времени. При
желании получить точную картину можно
решить нелинейную систему дифференциальных
уравнений, которая в данном случае имеет
вид (в соответствии с обозначениями на
структурной схеме рис.27.1)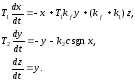
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 19
1.Выделение области устойчивости в пространстве двух параметров. Особые прямые. Правила штриховки границы.
Обратимся
к случаю двух незаданных параметров,
которые входят линейно в характеристическое
уравнение. В частном случае такими
параметрами могут быть два коэффициента
уравнения (9.1) . В общем случае при замене
 на
на характеристическое уравнение распадается
на два, которые образуют систему
характеристическое уравнение распадается
на два, которые образуют систему (9.3)
(9.3)
с
двумя незаданными параметрами
 и
и .
Система имеет единственное решение,
если ее определитель не равен нулю. В
случае линейной зависимости уравнений
они выражают одно и то же уравнение
прямой, которая называетсяособой.
.
Система имеет единственное решение,
если ее определитель не равен нулю. В
случае линейной зависимости уравнений
они выражают одно и то же уравнение
прямой, которая называетсяособой.
При вычислении определителя системы следует помнить, что его знак меняется при перестановке строк и столбцов. Знак же определителя системы, отображающей плоскость корней на плоскость параметров устанавливает правило обхода замкнутого контура. Рис.9.4 поясняет сказанное.
Рис.9.4. Направление обхода контура сохраняется при положительном определителе системы. Справа остается внутренняя область контура.

В
соответствии с уравнениями (9.3) система
координат
 должна быть правой.
должна быть правой.
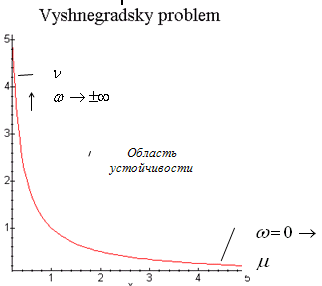
В качестве примера рассмотрим классическую задачу Вышнеградского.
Пример 3.
Характеристическое
уравнение имеет вид
 ,и
требуется выделить область устойчивости
на плоскости параметров
,и
требуется выделить область устойчивости
на плоскости параметров и
и .
Заменив
.
Заменив на
на ,получаем
систему из двух уравнений
,получаем
систему из двух уравнений (9.4).
Решение ее очевидно –
(9.4).
Решение ее очевидно – ,граница
устойчивости представляет собой
гиперболу
,граница
устойчивости представляет собой
гиперболу Для выяснения того, с какой стороны
гиперболы находится область устойчивости
необходимо вычислить определитель
системы (9.4)
Для выяснения того, с какой стороны
гиперболы находится область устойчивости
необходимо вычислить определитель
системы (9.4)
Таким
образом, при движении вдоль гиперболы
область устойчивости должна оставаться
слева, ибо при
 определитель положителен. После изменения
знака определителя область устойчивости
остается справа (рис.9.5). Гипербола
проходится дважды и, следовательно, при
ее пересечении два корня характеристического
уравнения пересекают мнимую ось. Этот
факт, впрочем, можно установить
элементарным путем, если положить
определитель положителен. После изменения
знака определителя область устойчивости
остается справа (рис.9.5). Гипербола
проходится дважды и, следовательно, при
ее пересечении два корня характеристического
уравнения пересекают мнимую ось. Этот
факт, впрочем, можно установить
элементарным путем, если положить и
и Тогда получается уравнение
Тогда получается уравнение

с
одним отрицательным корнем, равным –1,
и двумя корнями с положительной
действительной частью
 и
и