

3.Аналитическое описание нелинейных элементов. Кусочно-линейная аппроксимация.
Типичный элемент с разрывной характеристикой – идеальное реле
(рис.18.5).

Рис.18.5. Характеристика идеального реле (c=1).
Аналитически характеристика идеального релейного элемента записывается в виде
 (18.2)
(18.2)
Кроме элементов с идеальной релейной характеристикой встречаются также элементы с зоной нечувствительности (рис.18.6). Используя символику (18.2), такую характеристику можно кратко записать в виде
 ;
;
здесь x0 – половина зоны нечувствительности.
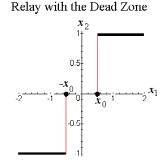
Рис.18.6.Характеристика реле с зоной нечувствительности (x0=0.5, c=1).
В магнитопроводе электромеханического реле обычно возникает явление гистерезиса, которое порождает своеобразную петлю в характеристике релейного элемента (рис.18.7). В этом случае выходная координата, принимающая всего два значения c или –c, зависит не только от входной координаты, но и от ее производной по времени. Так при возрастании величины x1 выражение для характеристики принимает вид
 ,
,
где x0 на этот раз половина ширины петли гистерезиса.
При убывании x1 характеристика принимает вид
 .
.
Оба выражения можно записать более экономно в форме
 ,где
,где
 .
.

Рис.18.7.Характеристика реле с гистерезисом.
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 2
1.Типовые тестовые воздействия и их краткая характеристика.
1.Единичная
ступенчатая функция

2.Дельта-функция
(функция Дирака) причем
причем ,
,
3.Гармоническое
входное воздействие, представляющее
собой
 , либо
, либо ,
либо их линейную комбинацию.
,
либо их линейную комбинацию.
2.Импульсная переходная характеристика линейной системы управления.
Среди
тестовых сигналов особая роль принадлежит
 функции
илифункции
Дирака, о
которой упоминалось в лекции 1. Реакция
динамической системы на это входное
воздействие называется импульсной
переходной характеристикой,
которую обычно обозначают символом
функции
илифункции
Дирака, о
которой упоминалось в лекции 1. Реакция
динамической системы на это входное
воздействие называется импульсной
переходной характеристикой,
которую обычно обозначают символом
 .
Пользуясь этим понятием, можно получить
выражение для вычисления реакции системы
на воздействие произвольного типа, в
том числе и на воздействие типа непрерывной
функции времени.
.
Пользуясь этим понятием, можно получить
выражение для вычисления реакции системы
на воздействие произвольного типа, в
том числе и на воздействие типа непрерывной
функции времени.
Формально
импульсную переходную характеристику
можно определить как оригинал
по отношению к передаточной функции.
В самом деле, т.к. изображение единичного
импульса равно 1, то изображение
 можно записать как
можно записать как .
.
Если
импульс возникает в момент
 ,
то реакция на него будет также сдвинута
и равна
,
то реакция на него будет также сдвинута
и равна ,
причем поскольку эффект не может
предшествовать причине, вызвавшей его
, то при
,
причем поскольку эффект не может
предшествовать причине, вызвавшей его
, то при .
.
С
другой стороны любая ограниченная
функция

 может
быть представлена суммой элементарных
импульсов
может
быть представлена суммой элементарных
импульсов ,
где
,
где и
и при остальных значениях аргумента. В
силу линейности реакция системы на
сумму импульсов будет равна сумме
реакций на каждое слагаемое, т.е.
при остальных значениях аргумента. В
силу линейности реакция системы на
сумму импульсов будет равна сумме
реакций на каждое слагаемое, т.е. .
.
Переходя
к пределу при
 ,
получаем формулу, известную какинтеграл
Дюамеля
,
получаем формулу, известную какинтеграл
Дюамеля
 .
(10.1)
.
(10.1)
Если
иметь в виду замечание о причине,
вызывающей импульсную реакцию, то в
формуле (10.1) верхний предел можно
ограничить текущим моментом времени,
т.е.
 .
(10.2)
.
(10.2)
В случае, когда входной сигнал равен нулю при отрицательных значениях аргумента в формулах (10.1) и (10.2) нижний предел интеграла также равен нулю.