

2.Алгоритм поиска минимума интегральной оценки в пространстве параметров.
Уменьшение оценки будем осуществлять подбором параметров tau И teta корректирующего элемента. Исходя из их допустимых значений, которые определяются рис.12.5, построим начальный симплекс с вершинами в точках с координатами, задаваемыми
|
№точки |
tau |
teta |
Интегр.оценка |
|
1 |
0.230 |
0.350 |
3.7203 |
|
2 |
0.220 |
1.150 |
1.6862 |
|
3 |
0.086 |
0.710 |
0.1664 |
Из
таблицы видно, что наибольшее значение
интегральной оценки соответствует
параметрам первой точки. Из этой точки
делается пробный
шаг в новую
точку с координатами, вычисляемыми по
формулам

В результате подсчета получаем новое значение интегральной оценки (Табл.13.2)
|
№ точки |
|
|
Интегр.оценка |
|
2 |
0.220 |
1.150 |
1.6862 |
|
3 |
0.086 |
0.710 |
0.1664 |
|
4 |
0.076 |
1.510 |
0.6629 |
Пробный
шаг привел к уменьшению интегральной
оценки и поэтому принимается.
Нетрудно видеть, что геометрически этот
шаг соответствует построению отрезка,
проведенного из вершины с наибольшей
интегральной оценкой через середину
противоположной стороны треугольника-симплекса,
образованного тремя первоначально
выбранными точками. Во вновь образованной
таблице «конкурирующими» вершинами
оказались две прежних и одна новая.
Однако повторение операции с пробным
шагом не приведет к положительному
результату, ибо новая вершина окажется
вне пределов зоны устойчивости (рис.12.5).
В этом случае необходимо сократить
вдвое длину ребер симплекса,
причем вершина с наименьшей интегральной
оценкой остается неподвижной. В данном
случае такой вершиной служит третья
точка. Формулы для вычисления координат
двух новых вершин очевидны:
После подсчета интегральных оценок получаем
|
№ точки |
|
|
Интегр.оценка |
|
3 |
0.086 |
0.710 |
0.16640 |
|
5 |
0.081 |
1.110 |
0.21388 |
|
6 |
0.153 |
0.930 |
0.39266 |
Последующие шаги приводят к постепенному уменьшению интегральной оценки переходного процесса. Остановка всей вычислительной процедуры производится по признаку малого выигрыша в интегральной оценке, которая по принятой терминологии в теории наименьших квадратов является функцией риска. В приведенном примере достаточно малой интегральной оценкой можно считать величину I2 = 0.046608.
3.Метод гармонической линеаризации. Вычисление коэффициентов.
Основная идея метода гармонической линеаризации относится к замкнутому контуру автоматической системы, в котором выделен нелинейный элемент с параметрами, независящими от времени, и остальная часть, описываемая линейным дифференциальным уравнением (рис.23.1).
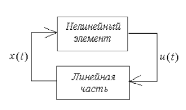
Рис.23.1. Структурная схема с выделенным нелинейным элементом.
Предположим,
что в замкнутом контуре возможен
некоторый периодический режим и выход
линейной части изменяется по закону
 .
Нелинейный элемент преобразует этот
гармонический сигнал в функциюu
( t
), также
периодическую, которую можно разложить
в ряд Фурье, т.е. представить в виде
.
Нелинейный элемент преобразует этот
гармонический сигнал в функциюu
( t
), также
периодическую, которую можно разложить
в ряд Фурье, т.е. представить в виде
 .
.
Коэффициенты
разложения вычисляются по известным
правилам:
 ,
при
,
при
 ,(23.1)
,(23.1) .
.
В
этих формулах
 - период функции
- период функции .
.
Главная
идея метода состоит в том, чтобы
ограничиться в разложении выхода
нелинейного элемента гармониками с
номером k,
не превышающим единицу, т.е. представить
этот выход в виде
 .(23.2)
.(23.2)
Здесь
мы предположили также, что
 .
Такой периодический режим мы назовемсимметричными
автоколебаниями.
.
Такой периодический режим мы назовемсимметричными
автоколебаниями.
Отбрасывание
гармоник более высокого порядка
оправдывается тем, что амплитуда их
после прохождения линейной части контура
уменьшается с ростом частоты. Действительно,
как мы видели при изучении линейной
теории, передаточная функция линейных
динамических систем представляется в
виде отношения двух полиномов
 ,
,
причем порядок знаменателя обычно превышает порядок числителя. Благодаря этому свойству и происходит подавление высших гармоник сигнала u(t) при прохождении линейной части.
Наша
дальнейшая задача состоит в определении
параметров установившихся автоколебаний
– их амплитуды и частоты. С этой целью
приступим к гармонической линеаризации
нелинейного элемента с характеристикой
 .
Введем обозначения (см.,например, книгу
Е.П.Попова «Теория нелинейных систем
автоматического регулирования и
управления»,М.: Наука,1979)
.
Введем обозначения (см.,например, книгу
Е.П.Попова «Теория нелинейных систем
автоматического регулирования и
управления»,М.: Наука,1979) и
и .
Условимся записывать выражение (23.2) в
виде
.
Условимся записывать выражение (23.2) в
виде .
(23.3)
.
(23.3)
Здесь
 - символ дифференцирования. Используя
формулы (23.1), получаем выражения для
вычислениякоэффициентов
гармонической линеаризации
- символ дифференцирования. Используя
формулы (23.1), получаем выражения для
вычислениякоэффициентов
гармонической линеаризации
 ,
,
 (23.4)где
(23.4)где .
.
Собственно
гармонической
линеаризацией
принято называть представление сигнала
u(t)
в форме (23.3). Переходя в (23.3) к изображениям
по Лапласу, запишем
 .
(23.5)
.
(23.5)
В
последнем выражении мы узнаем аналог
передаточной функции
нелинейного элемента, который с полным
основанием можно обозначить символом
 .
Полагая
.
Полагая ,
найдем такжеаналог
частотного оператора нелинейного
элемента
,
найдем такжеаналог
частотного оператора нелинейного
элемента
 .(23.6)
.(23.6)
Обращаем внимание читателя, что на этот раз правая часть (23.6) зависит не от частоты, а от амплитуды входного сигнала в нелинейный элемент. Однако эта амплитуда формируется при прохождении линейной части. Таким образом, параметры автоколебаний зависят как от линейной части, так и от характеристики нелинейного элемента.
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 11