

1.Написать передаточную функцию по заданному графику амплитудной частотной характеристики.
2.Интегральная квадратическая оценка качества переходного процесса.
После предварительного синтеза системы необходимо убедиться в том, что качество полученного переходного процесса удовлетворяет требованиям по длительности и характеру затухания. Для этого построим график переходного процесса ошибки. Изображение ошибки найдем из выражения (12.1) для передаточной функции с желаемыми свойствами при входной функции в виде единичного скачка
 .
.
Если процесс затухания ошибки получился затянутым и во всяком случае далеким от оптимального. Возникает вполне естественный вопрос о том, каким образом можно его улучшить. Наиболее естественным представляется путь выработки объективного критерия качества переходного процесса, зависящего от параметров корректирующего устройства. С помощью небольшого изменения этих параметров и осуществляется дальнейшее улучшение переходного процесса. Предполагается, что добротность системы, определяющая точность воспроизведения плавных воздействий, остается на прежнем уровне.
В качестве критерия качества переходного процесса нашла широкое применение квадратичная интегральная оценка вида
 .
.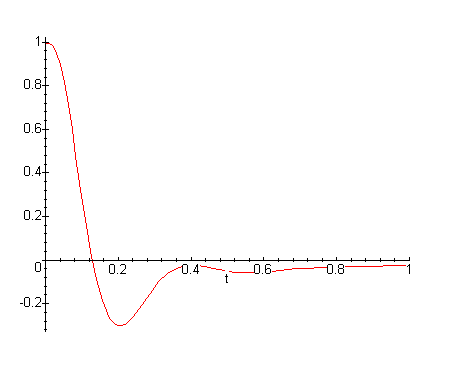
Рис.12.4.Переходный процесс ошибки в следящей системе после предварительного синтеза.
3.Исследование релейного автопилота. Канонические уравнения.
Запишем уравнение углового движения объекта, управляемого по каналу курса (рис.22.1)
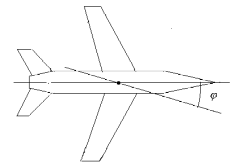
Рис.22.1.Летательный аппарат, управляемый по курсу .
 (22.1)
(22.1)
Здесь I - момент инерции летательного аппарата относительно вертикальной оси, проходящей через центр масс, h – коэффициент вязкого сопротивления среды, M 0 – момент сил управления.
В данном случае сделано предположение, что перекладка руля направления происходит мгновенно и до упора.
Для
дальнейшего исследования приведем
уравнение (22.1) к простейшему виду. Поделив
на M
0 ,получаем
 .
(22.2)
.
(22.2)
Введем
далее масштабные коэффициенты и новое
обозначение для переменной
 и
и .
Тогда
.
Тогда .
.
Аналогичным
путем преобразуем выражение для второй
производной:
 .
.
Таким
образом, вместо (22.2) запишем
 .
.
Выберем
коэффициенты A
и B
такие, чтобы левая часть приняла
простейший вид, т.е.
 .
.
Вводя
ставшее обычным обозначение для
производной, получаем знакомую систему
уравнений с идеальным реле
 (22.3)
(22.3)
Как мы видели в лекции 20, переходный процесс такой системы носит выраженный колебательный характер, что безусловно недопустимо для летательного аппарата. Возвращение самолета на курс будет сопровождаться бесконечным числом перекладок руля с выходом на упор.
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 9
1.Построить логарифмическую частотную характеристику замкнутой следящей системы по заданному графику разомкнутой.
2.Интегральная оценка переходного процесса с экспоненциальным сглаживанием.
Помимо
квадратичной интегральной оценки
существует оценка вида
 .
(12.4)
.
(12.4)
Минимум
этой оценки наступает при наименьшем
отклонении переходного процесса от
экспоненты вида
 .
(12.5)
.
(12.5)
В
самом деле, оценка (12.4) тождественно
преобразуется к виду
После
интегрирования последнего слагаемого
получаем
 ,
откуда и следует утверждение (12.5).
,
откуда и следует утверждение (12.5).