

1.Записать передаточную функцию при заданной структурной схеме.
2.Связь между качеством переходного процесса и распределением нулей и полюсов передаточной функции.

Рис.13.4.Распределение нулей и полюсов изображения ошибки после улучшения параметров желаемой характеристики.
Заметим, что нули изображения «нейтрализуют» полюсы изображения. Это нетрудно уяснить, если представить себе, что некоторые нули совпадают с полюсами. Тогда они просто сократятся и не окажут какого-либо влияния на переходный процесс. При сближении нулей и полюсов роль составляющих переходного процесса, которые соответствуют этим особым точкам, уменьшается, что и иллюстрируется в приведенном примере. Высокочастотная составляющая хотя и затухает сравнительно медленно, но коэффициенты при гармониках малы по сравнению с коэффициентами при более низкочастотной составляющей.
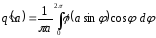
3.Гармоническая линеаризация идеального реле.
Идеальное
реле
 .
.
Для облегчения вычислений обратимся к графику выхода нелинейного элемента (рис.23.2).
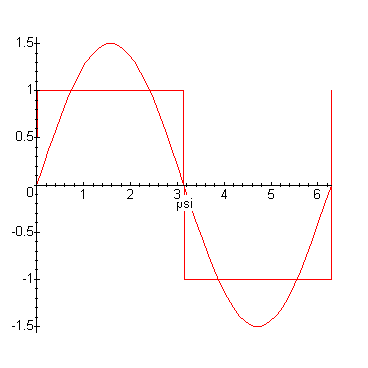
Рис.23.2.График входа и выхода идеального реле.
Из
чертежа видно, что при интегрировании
достаточно ограничиться интервалом
 и результат удвоить, т.е.
и результат удвоить, т.е.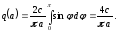 (23.7)
(23.7)
Что
касается другого коэффициента
гармонической линеаризации, то он равен
нулю, т.к. подынтегральная функция во
второй формуле
 (23.4) нечетна.
(23.4) нечетна.
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 12
1.Определение устойчивости движения по а.М. Ляпунову.
Движение
X(t)=0
называется устойчивым, если для любых
 >0
иT>0
существует
>0
иT>0
существует
 такое, что из условия
такое, что из условия следует
следует для любогоt
>T.
для любогоt
>T.
Это определение допускает наглядную геометрическую интерпретацию (рис.7.1).Границы множеств векторов с постоянной нормой изображаются здесь окружностями, а одна из осей используется для отсчета времени. В случае устойчивости решение, начинающееся внутри некоторой окружности с течением времени попадает внутрь цилиндра сколь угодно малого радиуса и в дальнейшем не покидает его.
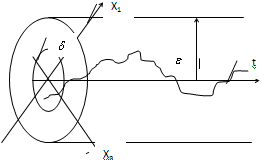
Рис.7.1. Геометрическая интерпретация устойчивого
решения
2.Способы модуляции в дискретных системах управления.
Работоспособность систем обеспечивается путем модуляции (амплитудно-импульсную (АИМ) и широтно-импульсную (ШИМ)). Квантование сигнала осуществляется импульсным элементом (рис.14.1).
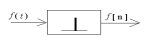
Рис.14.1.Получение решетчатой функции из непрерывной.
При
этом условились называть полученную
последовательность решетчатой
функцией и
записывать независимую переменную в
квадратных скобках. Решетчатую функцию
необходимо предварительно промодулировать.
При АИМ процесс модуляции происходит
согласно рис.14.2.
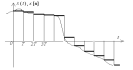
Рис.14.2.Амплитудно-импульсная
модуляция
Значение решетчатой функции в левом
конце каждого интервала продлевается
на весь период квантования. Непрерывная
функция переходит в последовательность
прямоугольных импульсов. Если импульс
единичной высоты и длительностью T
обозначить символом s(t),
то модулированный сигнал
 .
(14.1)
.
(14.1)
При ШИМ высота всех импульсов одинакова. Меняется их длительность, которая пропорциональна значению модулируемой функции в левом конце каждого интервала. В этом случае форма импульса
 ,
(14.2)
,
(14.2)
где
величина
 зависит от значения модулируемой функции
в левом конце интервала. Более определенно
зависит от значения модулируемой функции
в левом конце интервала. Более определенно
 ,
где
,
где
 - точная верхняя грань множества значений
решетчатой функции на всем множестве
значенийn
. При таком выборе коэффициента
пропорциональности не будет
«перемоду-ляции», при которой ширина
импульса превысит период квантования.
- точная верхняя грань множества значений
решетчатой функции на всем множестве
значенийn
. При таком выборе коэффициента
пропорциональности не будет
«перемоду-ляции», при которой ширина
импульса превысит период квантования.
Аналитическая запись модулированного сигнала будет иметь вид
 .
(14.3)
.
(14.3)
Здесь с – высота импульсов модулированного сигнала. Пример такой модуляции изображен на рис.14.3.
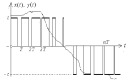
Рис.14.3. Широтно-импульсная модуляция функции x(t).
Функция s(t) вида (14.2) является импульсной переходной функцией формирователя импульсов при ШИМ.