

1.Доказать критерий устойчивости а.В. Михайлова.
Критерий
Михайлова был
разработан в 30-х г.г. ХХ столетия. Для
его вывода рассмотрим характеристический
полином,
т.е. выражение вида
 ,
(8.1)
,
(8.1)
в
котором положим
 ,
и проследим за изменением аргумента
вектора
,
и проследим за изменением аргумента
вектора при
при .
Очевидно, изменение аргумента отдельных
сомножителей в (8.1) будет зависеть от
того, в какой части плоскости расположен
корень (рис.8.1). Это изменение
.
Очевидно, изменение аргумента отдельных
сомножителей в (8.1) будет зависеть от
того, в какой части плоскости расположен
корень (рис.8.1). Это изменение
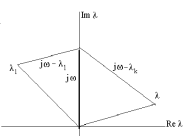
Рис.8.1. Расположение корней характеристического полинома
будет
равно 180о
, если корень расположен в левой
полуплоскости и –180о
в противоположном случае. Таким образом,
приращение аргумента вектора
 равно
равно
Здесь
m
– число корней с положительной
действительной частью. Если все корни
характеристического полинома имеют
отри-цательную вещественную часть, то
изменение аргумента характеристического
полинома составит

Этот
критерий обычно формулируется несколько
иначе. Если принять во внимание, что
годограф характеристического полинома
симметричен относительно вещественной
оси, то достаточно проследить за
изменением его аргумента лишь при
положительных значениях частоты. При
m=0
оно составит
 .
Иными словами:
.
Иными словами:
для того, чтобы характеристический полином (8.1) имел все корни с отрицательной вещественной частью необходимо, чтобы его годограф монотонно проходил n квадрантов комплексной плоскости.
2.Управляемость динамических систем. Теорема Калмана об управляемости.
запишем
соответствующее дифференциальное
уравнение в наиболее общем виде
 .
.
Здесь X=( x1,x2,…xn ) T – вектор состояния, G=( g1,g2,…gm) T – вектор управления,A - квадратная матрица порядка n.
В
соответствии с введенными обозначениями
матрица
 ,
не обязательно квадратная и некоторые
ее элементы могут быть нулями
,
не обязательно квадратная и некоторые
ее элементы могут быть нулями
Некоторые
компоненты вектора X
или их линейные комбинации можно
измерить. Совокупность измеренных
координат мы будем обозначать вектором
Y
= ( y1,y2,…yq
) T
, а его связь с компонентами вектора
состояния выражается соотношением Y
= CX,
где C
– некоторая, вообще говоря, прямоугольная
матрица
 .
.
Определение
Система называется управляемой, если существует ограниченный вектор управления G , под действием которого она переводится за конечное время из любого начального состояния X в начало координат X=(0,0,…0)T.
Если это свойство относится не ко всем компонентам вектора состояния, то система не полностью управляема. В частности, система может оказаться и полностью неуправляемой (если ни по какой координате система не обладает свойством управляемости).
Теорема Калмана.
Составим
матрицу из n
строк и nm
столбцов
 .
.
Система будет полностью управляемой, если ранг матрицы K равен n.
Пример
15.1. Пусть система описывается уравнениями

Запишем
матрицы
 ,
, и
и .
.
Составим
матрицу Калмана
 .
.
Определитель этой матрицы не равен нулю, следовательно ее ранг равен 2 и система управляема.
3.Вынужденные колебания в нелинейных системах. Условия существования.
Исследование вынужденных колебаний в нелинейных системах связано с определенными затруднениями из-за невозможности применения принципа суперпозиции, которым мы часто пользовались при исследовании линейных систем. Если на вход нелинейной системы поступает гармоническое воздействие, то на ее выходе возникает сложный многочастотный режим. Принцип гармонической линеаризации основан на отбрасывании высших гармоник. При этом рассматриваются наиболее простые одночастотные вынужденные колебания. На рис.26.1 представлена структурная схема с периодическим воздействием на входе.
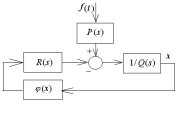 Рис.26.1.
Система с периодическим воздействием
на входе.
Рис.26.1.
Система с периодическим воздействием
на входе.
Применяя принцип гармонической линеаризации, запишем нелинейную характеристику в виде
 .
.
Предполагая,
что выход нелинейной системы -
гармоническая функция той же частоты,
что и входное воздействие, запишем
 .
.
Заменив,
как обычно, в операторах, показанных на
структурной схеме s
на j,
имеем
 .
.
Т.к. экспоненциальная функция не обращается в нуль ни при каком значении времени t, то в результате сокращения получаем
 (26.1)
(26.1)
Уравнение (26.1) содержит две неизвестные величины: амплитуду a установившихся колебаний выходной координаты и ее фазу . Решение уравнения можно получить, имея в виду весьма прозрачное графическое толкование. Записав уравнение в форме
 ,
(26.2)
,
(26.2)
замечаем,
что правая часть не зависит от частоты
и при изменении фазы в пределах
 геометрически соответствует окружности
радиусаB.
Левая же часть Z(a,)
при
фиксированном значении амплитуды a
и переменной
частоте
соответствует некоторому годографу,
который может быть построен по обычным
правилам (с выделением вещественной и
мнимой частей). На рис.26.2 показаны
годограф левой части уравнения (26.1) и
окружность радиуса B
с центром в начале координат.
геометрически соответствует окружности
радиусаB.
Левая же часть Z(a,)
при
фиксированном значении амплитуды a
и переменной
частоте
соответствует некоторому годографу,
который может быть построен по обычным
правилам (с выделением вещественной и
мнимой частей). На рис.26.2 показаны
годограф левой части уравнения (26.1) и
окружность радиуса B
с центром в начале координат.
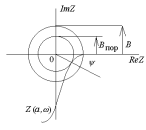 Рис.26.2.Графическое
решение уравнения (26.2)
Рис.26.2.Графическое
решение уравнения (26.2)
Из
рис.26.2 видно, что при значении амплитуды
внешнего воздействия
 решения уравнения (26.2) не существует.
При радиусе окружности, превышающем
пороговое значения амплитуды внешнего
воздействия решение возможно в точке
пересечения годографа левой частиZ(
a
,)
с окружностью. При этом определяется
значение частоты и фазы при выбранном
значении амплитуды a
для построения годографа. Можно поступить
наоборот – построить семейство годографов
с параметром a
и набора
фиксированных значений частоты и
определить пороговую амплитуду входного
воздействия, при которой одночастотный
режим возникает на выходе нелинейной
системы. При этом можно выявить резонансные
свойства системы, а также явление так
называемого захвата
частоты. Таким
путем можно получить зависимость
порогового значения входного воздействия
от частоты (рис.26.3). С другой стороны
можно получить однопараметрическое
семейство частотных характеристик
нелинейной системы, т.е. зависимости
амплитуды выходного сигнала от частоты
для различных значений амплитуды
входного воздействия. Здесь следует
вспомнить, что в случае линейной системы
амплитудная частотная характеристика
не зависела от амплитуды входного
воздействия.
решения уравнения (26.2) не существует.
При радиусе окружности, превышающем
пороговое значения амплитуды внешнего
воздействия решение возможно в точке
пересечения годографа левой частиZ(
a
,)
с окружностью. При этом определяется
значение частоты и фазы при выбранном
значении амплитуды a
для построения годографа. Можно поступить
наоборот – построить семейство годографов
с параметром a
и набора
фиксированных значений частоты и
определить пороговую амплитуду входного
воздействия, при которой одночастотный
режим возникает на выходе нелинейной
системы. При этом можно выявить резонансные
свойства системы, а также явление так
называемого захвата
частоты. Таким
путем можно получить зависимость
порогового значения входного воздействия
от частоты (рис.26.3). С другой стороны
можно получить однопараметрическое
семейство частотных характеристик
нелинейной системы, т.е. зависимости
амплитуды выходного сигнала от частоты
для различных значений амплитуды
входного воздействия. Здесь следует
вспомнить, что в случае линейной системы
амплитудная частотная характеристика
не зависела от амплитуды входного
воздействия.
 Рис.26.3.
Зависимость пороговой амплитуды от
частоты возмущающего воздействия
Рис.26.3.
Зависимость пороговой амплитуды от
частоты возмущающего воздействия
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 16