

3. Исследование релейного автопилота. Скользящий режим.
Попробуем
улучшить качество системы управления,
вводя в обратную связь кроме сигнала
по углу еще и сигнал по его производной
по .
Вместо
 (22.3) при этом будем иметь
(22.3) при этом будем иметь (22.4)
(22.4)
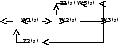
Фазовая
плоскость при этом разобьется на две
полуплоскости линией
переключения
 (рис.22.2).
(рис.22.2).
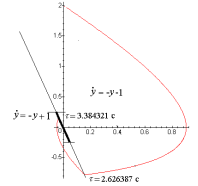
Рис.22.2.Фазовый портрет релейного автопилота с сигналом по Углу и по производной от угла отклонения.
Проследим
за поведением фазовых траекторий при
пересечении линии переключения. Для
этого введем обозначение
 .
Согласно (22.4) фазовая плоскость будет
заполнена траекториями двух видов,
которые будут решениями дифференциальных
уравнений
.
Согласно (22.4) фазовая плоскость будет
заполнена траекториями двух видов,
которые будут решениями дифференциальных
уравнений (22.5)
(22.5)
Без
ограничения общности рассмотрим случай,
когда траектория из полуплоскости, где
 подходит
к линии переключения справа. Очевидно,
что при этом
подходит
к линии переключения справа. Очевидно,
что при этом
 .
Если производная сохранит знак, то после
пересечения линии переключения траектория
станетудаляться
от нее (tau=2.626387).
Если знак производной при пересечении
изменится, то траектория не
будет удаляться
от линии переключения. Рассмотрим именно
такой случай. Очевидно всегда справедливо
соотношение
.
Если производная сохранит знак, то после
пересечения линии переключения траектория
станетудаляться
от нее (tau=2.626387).
Если знак производной при пересечении
изменится, то траектория не
будет удаляться
от линии переключения. Рассмотрим именно
такой случай. Очевидно всегда справедливо
соотношение
 ,причем
после пересечения действующим будет
второе уравнение системы (22.5).Таким
образом,
,причем
после пересечения действующим будет
второе уравнение системы (22.5).Таким
образом, .
.
Траектория
не будет удаляться от линии переключения,
если
 или,
предполагая
или,
предполагая ,
, .
(22.6)
.
(22.6)
Следует
обратить внимание на симметрию
уравнений системы (22.5). Действительно,
если изменить знаки у переменной второго
уравнения, то оно перейдет в первое и
наоборот. Следовательно, вместо (22.6)
можно с полным основанием записать
условие, при котором фазовые траектории
перестают удаляться от линии переключения
 (22.7)
(22.7)
Геометрически
это означает, что при попадании в полосу,
определяемую условием (22.7), фазовые
траектории приближаются к линии
переключения с
обеих сторон.
При этом изображающая точка перемещается
вдоль линии переключения к началу
координат. Такой режим движения называется
скользящим.
Изменение
координат
по времени определяется уравнением ,
решение которого
,
решение которого соответствует
плавному апериодическому приближению
к началу координат. Оно будет происходить
тем быстрее, чем меньше будет параметр.
При этом, однако, следует иметь в виду,
что с уменьшением этого параметра
сокращается и длина отрезка скольжения,
т.е. прежде чем наступит скользящий
режим будут наблюдаться те самые
колебания, которые мы попытались
предотвратить введением сигнала по
скорости изменения отклонения от курса.
Очевидно, в каждом отдельном случае
необходимо найти компромиссное решение
по параметру бетта.
соответствует
плавному апериодическому приближению
к началу координат. Оно будет происходить
тем быстрее, чем меньше будет параметр.
При этом, однако, следует иметь в виду,
что с уменьшением этого параметра
сокращается и длина отрезка скольжения,
т.е. прежде чем наступит скользящий
режим будут наблюдаться те самые
колебания, которые мы попытались
предотвратить введением сигнала по
скорости изменения отклонения от курса.
Очевидно, в каждом отдельном случае
необходимо найти компромиссное решение
по параметру бетта.
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 10
1.Преобразование многоконтурных структурных схем.
Автоматические системы, структурная схема которых содержит более одного контура называются многоконтурными. В целом ряде задач необходимо уметь преобразовать многоконтурную структурную схему к одноконтурной и мы рассмотрим здесь несколько типичных случаев. На рис.6.6 показана структурная схема с внутренним стабилизирующим контуром с гибкой обратной связью.

Рис.6.6.Следящая система с внутренним стабилизирующим контуром
Преобразование этой схемы к одноконтурной можно выполнить двумя путями. Первый путь состоит в записи передаточной функции внутреннего контура в виде известного нам выражения (6.3).После такого преобразования система становится одноконтурной с жесткой обратной связью (рис.6.7).Передаточная функция при размыкании этой обратной связи записывается в виде
 .
.
Второй способ состоит в суммировании передаточных функций Y(s) и
Z(s). Система также становится одноконтурной, но передаточная функция ее при размыкании контура выглядит иначе

Таким образом, операция преобразования структурных схем может приводить к различным вариантам передаточных функций разомкнутой системы.
 Рис.6.7.Результат
преобразования структурной схемы,
изображенной на рис.6.6.
Рис.6.7.Результат
преобразования структурной схемы,
изображенной на рис.6.6.
Рассмотрим еще пример преобразования схемы с перекрестной обратной связью (рис.6.8).
 А)
А)
 Б)
Б)
Рис.6.8.Преобразование структурной схемы с перекрестной обратной связью.
После получения варианта Б) дальнейшие преобразования сводятся к уже рассмотренным случаям и не требуют комментариев.