

10.12. Система торможения колёс основных стоек шасси
Система торможения на современных самолётах обеспечивает:
- безъюзовое торможение колёс шасси после посадки самолёта;
- торможение колёс при движении самолёта по аэродрому (РД и перрону);
- затормаживание колёс на стоянке самолёта;
- торможение колёс при прерванном взлете самолёта;
- подтормаживание колёс при уборке шасси.
Тормозные системы самолётов отличаются воможностью обеспечения максимальной эффективности торможения и антиюзовой автоматикой.
На легкомоторных самолётах для торможения колёс используется сжатый воздух, на самолётах ГА с большим взлётным весом – давление гидросистемы.
На большинстве самолётов для борьбы с юзом используются инерционные датчики, устанавливаемые на каждом тормозном колесе. Датчик представляет собой массивный диск, расположенный на той же оси, что и колесо и вращается вместе с ним.
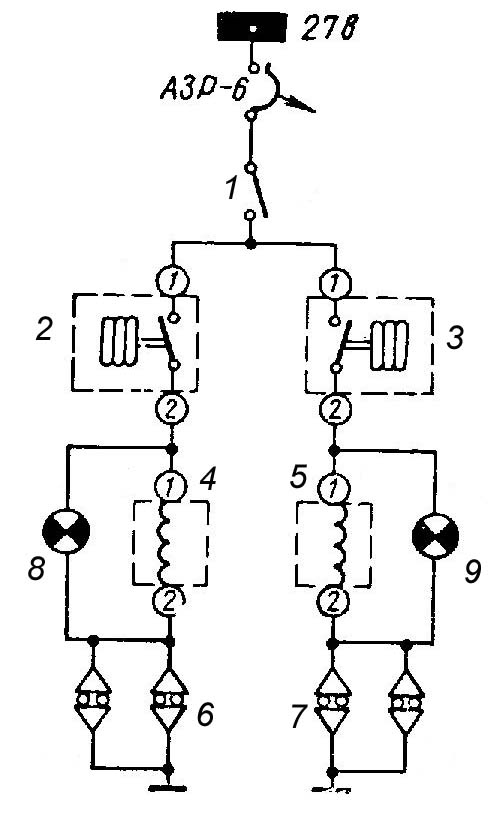
Рис. 10.18. Схема антиюзовой системы с датчиками инерционного типа
1 – выключатель системы; 2,3 – электрогидравлические выключатели;
4,5 – электромагнитные краны рстормаживания; 6,7 – датчики юза;
8 – лампы сигнализации.
При нажатии на тормозные педали пилотов подаётся давление в тормоза и одновременно срабатывают электрогидравлические выключатели 2,3, которые подают плюс на электромагнитные краны растормаживания и на сигнальные лампы 6,7. При попадании колеса на скользкое покрытие происходит резкая блокировка его вращения. Массивный диск датчика продолжает вращаться по инерции. При этом замыкаются контакты датчика 6 или 7 и подают минус на кран 4 (5) и на соответствующую лампу. Кран открывается и снимает давление с тормозов. Лампа сигнализирует экипажу о работе антиюзовой автоматики.
После растормаживания колеса оно возобновляет вращение, датчик юза размыкает контакты, отключая сигнальную лампу и клапан растормаживания. Давление вновь подаётся на тормоз соответствующего колеса. Если происходит повторная блокировка колеса, датчик юза снова срабатывает и т.д.
Подобные антиюзовые системы установлены на Як-40, Ан-24, Ан-26, Ил-18, Ту-134 и др.
10.13. Система торможения колёс современных магистральных самолётов 1 класса
Система торможения – электрогидравлическая с дистанционным управлением, предназначена для торможения колес основных ног шасси и для подтормаживания колес при уборке шасси. Система торможения состоит из двух одинаковых подсистем основного и резервного торможения и канала стояночного торможения, развязанных между собой электрически и гидравлически. Переход с основной подсистемы на резервную происходит при отказах в основной подсистеме автоматически или вручную.
На каждой тележке шасси смонтированы 4 тормозных колеса, которые управляются попарно (передние, задние) своими электрическими каналами.
Основная и резервная подсистемы обеспечивают:
- нормальное безъюзовое торможение;
- послевзлетное подтормаживание колес при уборке шасси;
- автоматическое торможение при посадке самолёта:
- режим «ПОНИЖ» - с пониженным давлением;
- режим «НОРМ» - с нормальным давлением;
- режим «ФОРСИР» – с повышенным давлением;
При включении «ФОРСИР» давление в тормозах при автоматическом торможении увеличивается в 1,5 раза.
Антиюзовая автоматика в основной и резервной подсистемах, работающая по замедлению и проскальзыванию колес относительно ВПП, обеспечивает безъюзовое торможение при всех значениях коэффициента сцепления шин с поверхностью ВВП. Предусмотрены блокировки, предотвращающие подачу давления к нераскрученным при посадке колесам.
Гидравлическое питание основной и резервной тормозной системы осуществляется от разных гидросистем.
Состав основной тормозной системы
Тормозная система состоит из следующих устройств:
1. Задатчики давления УЭ62А-2 (4 шт.) Расположены по два под педалями пилотов и связаны с ними. Каждый задатчик состоит из двух одинаковых датчиков, один из которых работает на основную, а второй - на резервную систему торможения.
УЭ62А-2 состоит из КВ выдачи сигнала в блок управления тормозами (БУПТ) и из задающего датчика трансформаторного типа, сигнал с которого пропорционален нажатию педалей.
2. Агрегаты управления УГ-166-2 (2 шт.)- по одному на тележку шасси. Агрегат преобразует электрический сигнал в давление, которое подается на тормоза. Имеет два канала управления, соответственно для передней и задней пары колес.

Рис. 10.19. Функциональная схема одного канала тормозной системы
3. Датчики обратной связи ДОСМ (4 шт.). Расположены на тележках шасси по два датчика. Один датчик работает с передней, второй - с задней парой колес. Каждый датчик выдает электрический сигнал, пропорциональный давлению в соответствующей паре колес, в БУПТ. Датчики - трансформаторного типа.
4. Электромашинные тахогенераторы МТТГ-500 (8 шт.) - по одному на каждом колесе. Сигнал с тахогенератора, пропорциональный угловой скорости качения колеса, подается в блок управления тормозами, обеспечивая контроль за относительным проскальзыванием колеса, которое не должно превышать 50%.
5. БУПТ-24 - блок управления тормозами (электронный). Обеспечивает управление процессом торможения без юза, с максимальной эффективностью. При этом БУПТ преобразует сигналы с задатчиков давления, датчиков обратной связи и МТТГ в сигналы управления УГ-166-2.
6. Электрогидравлический распределитель агрегат 774600 НГЖ. Находится рядом с соответствующими агрегатами управления УГ-166-2 и служит для подачи давления к ним.
Резервная тормозная система устроена аналогично. Она использует те же задатчики давления УЭ62А-2 и электромашинные тахогенераторы МТТГ-500/5-3С, что и основная система торможения. Остальные агрегаты используются только в резервной системе. Дополнительно в резервной системе выполнен канал стояночного торможения.
Принцип работы системы
В полете электрическая схема тормозной системы (кроме БУПТ) обесточена, полости тормозов соединены со сливом. Это выполнено для того, чтобы исключить возможность приземления с заторможенными колесами.
Блокировка торможения снимается после срабатывания КВ обжатия главных ног шасси с задержкой времени 51 сек или по сигналу МТТГ при раскрутке колес до скорости, соответствующей V=5010 км/час (если нет сигнала с КВ обжатия шасси).
При снятии блокировки система приходит в рабочее состояние. При нажатии на педали концевые выключатели в УЭ-62А подают 27В в БУПТ, который включается в работу и выдает 115 В на УЭ-62А и на ДОСМ, включая их в работу. Также с БУПТ подается 27 В на распределители 774600, которые срабатывают и подают НГЖ к УГ-166.
Сигнал переменного тока с УЭ-62А, пропорциональный обжатию педалей, подается на БУПТ, который формирует управляющий сигнал.
Управляющий сигнал с БУПТ-24 поступает на УГ-166, который в свою очередь подает давление на тормоза тележки соответствующей ноги. Величина давления в тормозах пропорциональна управляющему сигналу БУПТ.
Как только в тормозах появляется давление, на выходе датчиков обратной связи ДОСМ появляется сигнал, который подается в БУПТ, где он сравнивается с сигналом соответствующего задатчика давления УЭ62А-2. В момент, когда сигнал с ДОСМ достигнет заданной величины, БУПТ прекратит дальнейший рост давления.
С МТТГ в БУПТ поступают сигналы в виде напряжения переменного тока, величина и частота которого пропорциональны фактической скорости катящегося колеса. В блоке управления величины сигналов (величины скоростей) колес соответствующей тележки сравниваются между собой. Если nmin < 0.5 nmax, БУПТ дает сигнал на растормаживание пары колес с заниженной скоростью. При восстановлении среднего значения скорости (среднего значения сигнала с соответствующих МТТГ), торможение восстанавливается.
При отказе обоих каналов основной системы торможения автоматически включается в работу резервная система. Резервная система торможения работает так же, как и основная.
В резервной системе дополнительно установлен редукционный клапан, обеспечивающий стояночное торможение. Управление клапаном механическое от рукоятки в кабине экипажа.