

13. Что такое настройка кинематической цепи технологического оборудования.
Настройка кинематической цепи заключается в ее подготовке к выполнению соответствующих движений. Для чего устанавливаются в необходимые положения различные элементы управления скоростями резания (главного движения) и движения подачи. Состоит из трех этапов:
Определяем количество и характер кинематических движений для формообразования, деления, врезания исходя из формы поверхности и инструмента. Кинематическая схема делится на столько частей сколько необходимо движений.
Для конечных звеньев в каждой цепи записываются расчетные перемещения исходя из формы поверхности и соответствующего принятого метода формообразования с составлением уравнения кинематического баланса связывающего оба конечных перемещения.
Согласно уравнению кинематического баланса определяется требуемый параметр настройки кинематической цепи и записывается формула для вычисления передаточного отношения называемой формулой настройки.
Уравнение кинематического баланса – математическое выражение отражающее связь передаточных отношений между движениями начальных и конечных звеньев рассматриваемой кинематической цепи называется уравнением кинематического баланса.
nшп=nэ/uпостuкс=nэu’постu’кс
можно определить передаточное отношение коробки скоростей настраевомого элемента. Из уравнения кинематического баланса можно получить формулу настройки - выражение для определения передаточного отношения настраевомого элемента или звена.
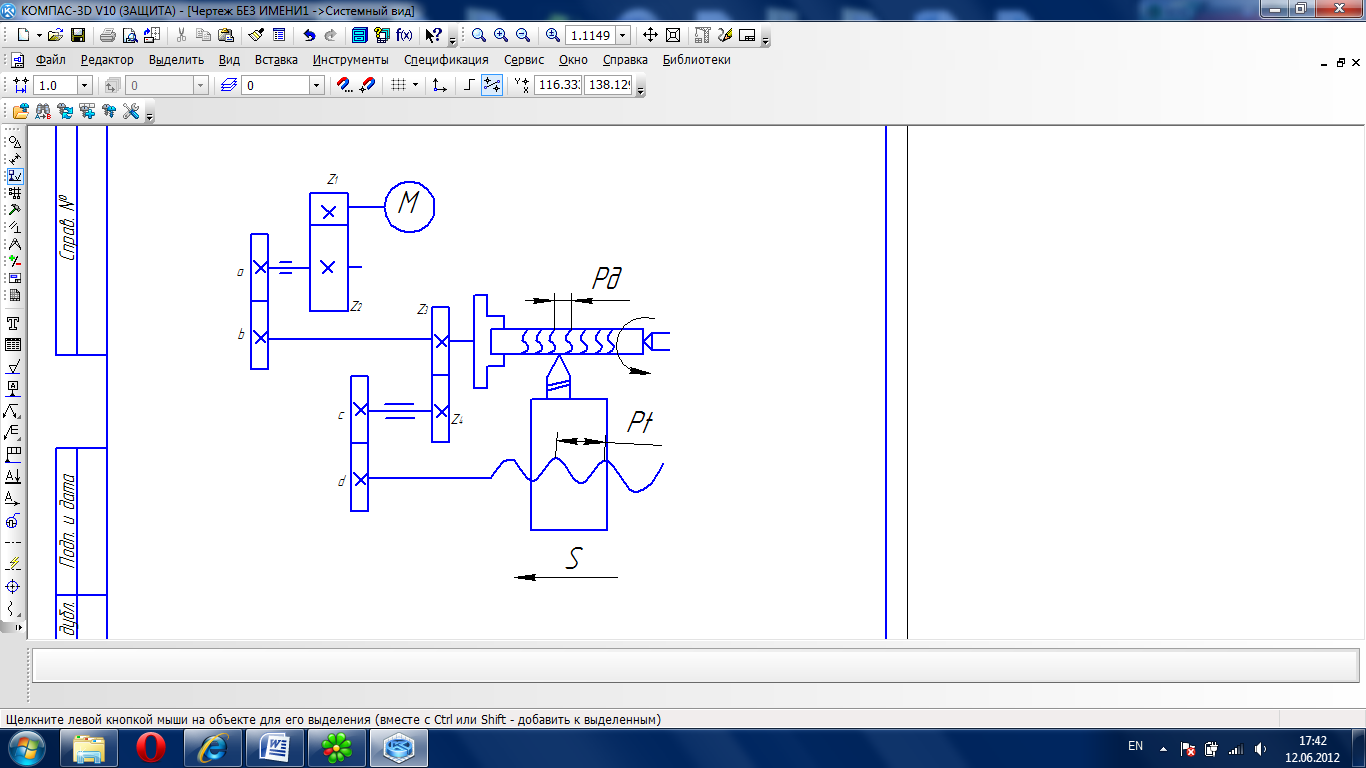
От двигателя М движение передается через колеса z1, z2 и сменные зубчатые колеса a и b. Эта цепи называется скоростной (начальное звено электродвигатель). Конечные шпиндели – частота постоянная шпинделя назначают в результате установки a и b. Расчетные перемещения этой цепи
nэ→n
Уравнение кинематического баланса этой цепи: nэz1/z2 a/b
При наличии коробки скоростей с некоторым количеством зубчатых передач, общее передаточное отношение обозначим буквой. При включении в данную цепь каждой ступени обозначим через uH уравнении кинематического баланса примет вид:
n=nэ/cuH
n=nэc’u’H
uH=nэ/nc
u’H=n/nэc
Вторая кинематическая цепь связывает вращения шпинделя с поступательным перемещением суппорта. За один оборот детали резец должен переместиться на один ход резьба HH=PдK. Это условие связывает перемещение начального звена шпинделя и конечного суппорта. 1 оборот шпинделя → НН – настраевомый ход резьбы. Уравнение кинематического баланса примет следующий вид: 1об.ш. z3/z4 c/d Kв Pв = КнPд. К – число заходов ходового винта, Р – шаг. Между шпинделем и ходовым винтом расположена коробка подач с определенным количеством настраевымых зубчатых колес. 1об.ш. с1 u’H Kв Pв = KHPд. 1об.ш. Kв Pв/c1uH=KHPд.
с1 и uH соответственно передаточное отношение постоянных и настраевомых колес.
uH=KHPд/KвPвc1 –передаточное отношение настравомого звена.
Для настройки любой кинематической цепи при заданных движениях начального и конечного звена формулу настройки, звенья и определить отношение настраевомого элемента.