

4.1. Индукционные преобразователи
Принцип действия индукционных преобразователей основан на законе электромагнитной индукции, согласно которому в электрической катушке, помещенной в изменяющееся магнитное поле, наводится ЭДС, величина которой зависит от напряженности поля и скорости его изменения. Если магнитное поле переменное, то скорость его изменения во времени задается источником поля. При постоянном поле его изменение в пространстве, занятом преобразователем, осуществляется вращением или перемещением последнего.
Неподвижные индукционные преобразователи называют пассивными, а подвижные-активными.
Пассивные индукционные преобразователи (ПИП).Пассивный индукционный преобразователь представляет собой каркас из диэлектрического материала, на котором нанесена электрическая обмотка. Для увеличения чувствительности в катушку помещают ферромагнитные сердечники, однако в этом случае амплитудная характеристика сердечника в области сильных полей становится нелинейной. Преобразователи, реагирующие на величину напряженности поля, называют полемерами, а на величину его градиента –градиентометрами.
Напряженность поля измеряют А/м, а его
градиент –![]() .
.
ЭДС, наводимая в электрической катушке
гармоническим полем, Hx=Hmxsinωtопределяется из выражения![]()
где
![]() - магнитная постоянная;
- магнитная постоянная;
ω – круговая частота;
W- число витков обмотки;
S- ее сечение в направлении, перпендикулярном осиx;
Hmx- амплитудное значение напряженности магнитного поля.
б) активные преобразователи
Среди активных преобразователей известны такие, как сканирующие, вращающиеся и вибрирующие.
Сканирующиепреобразователи применяют для измерения величины и градиента напряженности постоянного магнитного поля. Эти преобразователи перемещают с некоторой скоростьюVвдоль определенной траектории. Порог реагирования преобразователя зависит от числа витков, скорости перемещения и составляет от 10 до 50 А/м.
Вращающиесяиндукционные преобразователи
Рис. Вращающийся индукционный преобразователь
ИП- измерительный прибор, Д- электродвигатель, П- преобразователь. Принцип его действия легко понять из рисунка. Двигатель приводит во вращение индукционную катушку, которая пересекает силовые линии магнитного поля у поверхности контролируемого объекта. Съем электрического сигнала с преобразователя осуществляется измерительным прибором с помощью скользящих контактов.
Разновидностью вращающихся преобразователей является преобразователь Барнетта, в котором одновитковый ротор вращается в измеряемом магнитном поле под действием струи воздуха со скоростью 500 об/сек. В преобразователях этого типа используется трансформаторный токосъем. Удается измерять напряженности магнитных полей, соответствующих индукции 10-12 Тл.
Вибрирующие преобразователи. Вибрирующийпреобразователь представляет собой тонкослойную вибрирующую катушку, которой сообщают вибрации в направлении, перпендикулярном полю Нх. Такие преобразователи используют для измерения напряженности магнитного поля непосредственно вблизи поверхности объекта. Существенным недостатком преобразователей этого типа является высокая погрешность измерений (достигает 3-5%).
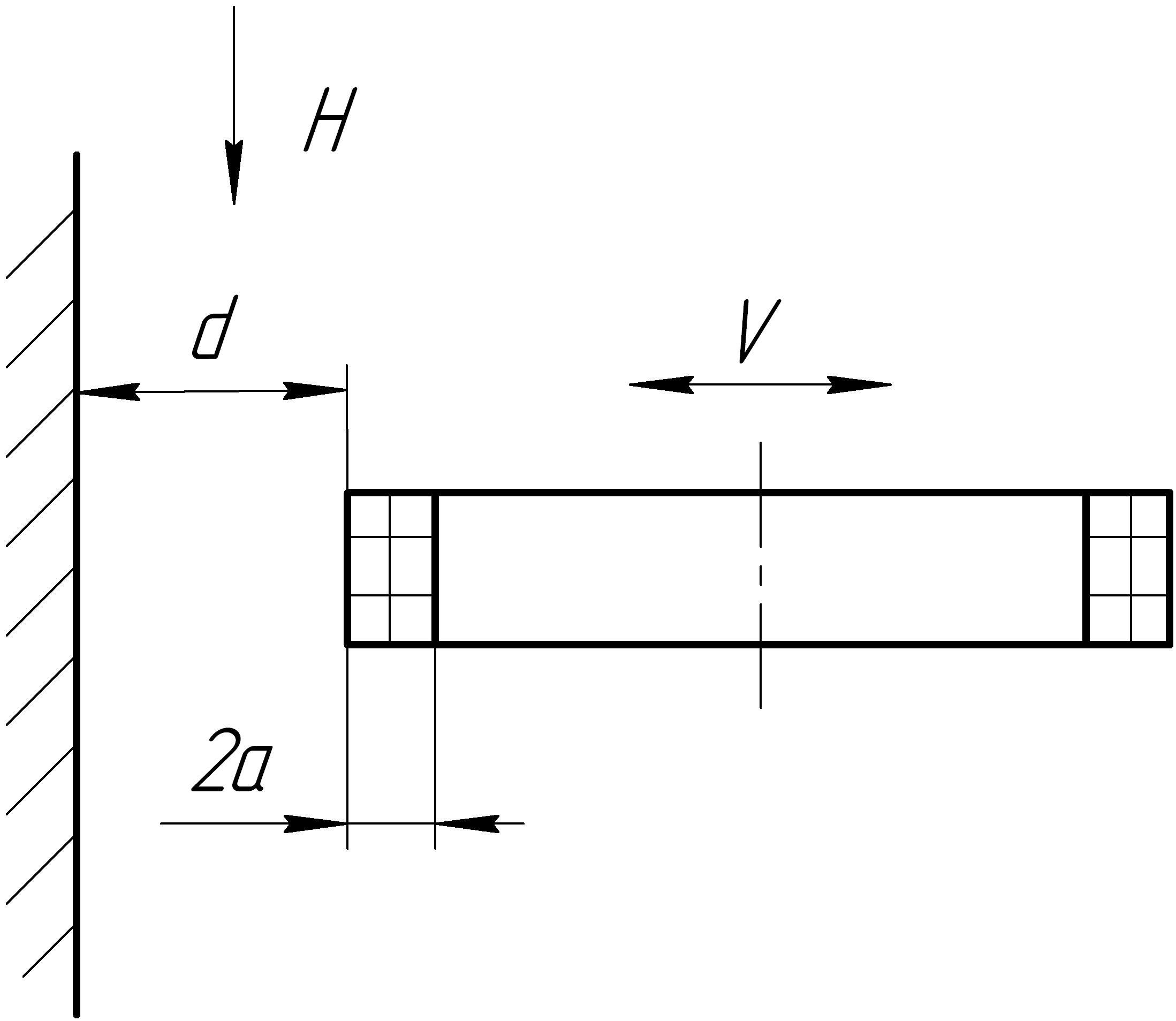
Рис. Вибрирующий преобразователь