

7. Определение топографии и градиента магнитного поля дефекта
При исследовании распределения поля Н магнитный преобразователь помещают в различные точки вблизи контролируемой поверхности. Значение горизонтальной (тангенсальной) составляющей поля дефекта определяют по формуле:
![]() ,
,
![]() -X- составляющая
результирующего поля в точке М.
-X- составляющая
результирующего поля в точке М.
![]() -X- составляющая внешнего
поля в той же точке.
-X- составляющая внешнего
поля в той же точке.
Важным требованием при исследовании топографии поля является то, что ширина чувствительного элемента преобразователя вдоль направления поля должна быть значительно меньше ширины исследуемой области над дефектом. В качестве преобразователей используют феррозонды, преобразователи Холла, индукционные преобразователи и т. д.
В случае индукционных преобразователей измерение напряженности поля производят при включении или выключении намагничивающего поля. По результатам экспериментов строят график зависимости напряженности поля дефекта от расстояния.
Применимые для исследования топографии напряженности магнитного поля преобразователи Холла, феррозондовые, магниторезистивные и др. не всегда удобны: во-первых, их трудно выставить соответственным образом для измерения нормальной или тангенциальной составляющей поля на криволинейной поверхности. Кроме того, такие преобразователи имеют достаточно большие размеры и позволяют выполнять измерения на достаточно большом расстоянии от объекта. Для измерения напряженности магнитного поля в непосредственной близости от криволинейной поверхности объекта иногда применяют ленточные локальные магнитоносители (ЛЛМ).
7.1. Градуировка ллм
Ленточный локальный магнитоноситель представляет собой полоску магнитной ленты шириной 1,5-2 мм. Так как толщина магнитноактивного слоя ленты составляет 5-25 мкм, причем он нанесен на эластичную подложку, то ЛЛМ позволяет приблизиться непосредственно к поверхности детали и копировать ее форму. ЛЛМ содержит небольшое количество ферромагнитного материала и поэтому слабо искажает то поле, которое измеряется. Так как тангенциальная составляющая напряженности магнитного поля не изменяет своей величины и знака при переходе границы раздела сред, то можно считать в первом приближении, что уложенный на поверхность объекта ЛЛМ позволяет измерить напряженность поля в подповерхностном слое металла.
Предварительно ЛЛМ градуируют в однородном магнитном поле бесконечно длинного соленоида.
Рис. Намагничивание ленточного локального магнитоносителя в соленоиде
С этой целью размагниченныйЛЛМ закрепляют на цилиндрической вставке, которую с помощью штанги помещают в среднюю часть бесконечно длинного соленоида. При этом оси соленоида и кольца, образованного ЛЛМ, совпадают. На 2-3 секунды включают ток в катушке, при этом измеряют напряженность поля в соленоиде, например, с помощью микровольтампервеберметра типа Ф18 (см. ниже). Затем ЛЛМ извлекают из соленоида и измеряют напряженность его остаточного поля.
Рис. Градуировочная характеристика размагниченного ленточного локального магнитоносителя
Увеличивают ток в катушке до I2, а после его отключения снова помещают размагниченный ЛЛМ в соленоид, и производят аналогичные измерения. Строят график зависимости амплитуды сигнала на экране осциллографа при набегании индукционной магнитной головки на край ЛЛМ от напряженности магнитного поля (см. рис. выше).
При измеренияхнапряженности магнитного поля размагниченный ЛЛМ укладывают на исследуемую поверхность объекта и намагничивают вместе с объектом в направлении поперек ЛЛМ. Затем измеряют амплитуду сигнала при считывании записи с ЛЛМ и по градуировочной кривой определяют напряженность поля.
Замечание:Напряженность поля внутри
бесконечно длинного соленоида можно
определить по формуле (Н=Iw/l),
если ток измеряется амперметром, имеющим
высокий класс точности. В противном
случае для этого можно воспользоваться,
например, микровольтампервеберметром
типа Ф-18. С этой целью на штангу наносят
измерительную катушку, состоящую из
одного-двух витков. Измерения магнитного
потокапроизводят
при включении или выключении тока в
соленоиде. Напряженность поля определяют
по формуле![]() (*)
(*)
где
![]() - показание прибора;
- показание прибора;
![]() - магнитная проницаемость магнитной
вставки;
- магнитная проницаемость магнитной
вставки;
![]() - магнитная постоянная;
- магнитная постоянная;
![]() - два витка;
- два витка;
![]() - сечение провода.
- сечение провода.
Формула (*) получена из:
![]()
Замечание: ЛЛМ не позволяют измерять
поля напряженностью
![]() ленты, так как в этом диапазоне полей
лента намагничивается на участке
начального (обратимого) намагничивания.
Для измерения слабых магнитных полей
можно использоватьполяризованный
(предварительно намагниченный, не
обязательно до насыщения, ЛЛМ).
ленты, так как в этом диапазоне полей
лента намагничивается на участке
начального (обратимого) намагничивания.
Для измерения слабых магнитных полей
можно использоватьполяризованный
(предварительно намагниченный, не
обязательно до насыщения, ЛЛМ).
Поясним физику процесса записи магнитных
полей в этом случае. В результате
поляризации ЛЛМ приобрел остаточную
намагниченность
![]() .
Если такой ЛЛМ поместить на штанге
внутрь соленоида, то при намагничивании
его полем противоположного направления
(
.
Если такой ЛЛМ поместить на штанге
внутрь соленоида, то при намагничивании
его полем противоположного направления
(![]() )
остаточная намагниченность уменьшается
до
)
остаточная намагниченность уменьшается
до![]() .
Причем, чем больше
.
Причем, чем больше
![]() ,
тем меньшую остаточную намагниченность
будет иметь поляризованный ЛЛМ (см.
рисунок ниже).
,
тем меньшую остаточную намагниченность
будет иметь поляризованный ЛЛМ (см.
рисунок ниже).
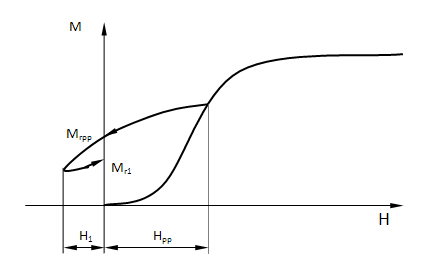
Рис. Измерение магнитных полей с помощью поляризованного ЛЛМ
График зависимости остаточной намагниченности поляризованного ЛЛМ от напряженности поля:
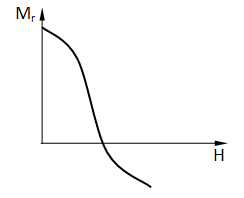
Рис. Схематическая зависимость остаточной намагниченности поляризованного ЛЛМ от напряженности поля
Следовательно, поляризованный ЛЛМ позволяет измерять напряженности слабых магнитных полей.