

2 Выбор и комплектование машин для производства
ЗЕМЛЯНЫХ РАБОТ МЕХАНИЗИРОВАННЫМ СПОСОБОМ
2.1 Способы производства земляных работ в дорожном строительстве
Земляные работы в зависимости от вида сооружений, свойств грунтов и технических ресурсов могут осуществляться механическим, гидромеханическим, взрывным и комбинированным способами.
Механический способ заключается в разработке грунта резанием послойно с использованием землеройных и землеройно - транспортных машин.
Гидромеханический способ состоит в разрушении и перемещении грунта гидромониторными установками и землесосными снарядами.
Взрывной способ заключается в разрушении и перемещении грунта энергией взрыва, образующейся при химическом превращении взрывных веществ с применением специального оборудования.
Комбинированный способ основан на сочетании нескольких способов с применением различных видов машин.
Наиболее распространённый – механический способ, который является универсальным для разработки грунтов различной категории. Им выполняется не менее 80% всего объёма земляных работ.
Все строительные машины, используемые для механического способа земляных работ, можно разделить на следующие группы:
1. Землеройные машины, куда входят одноковшовые и многоковшовые экскаваторы и погрузчики, отделяющие грунт от массива движением рабочего органа и перемещающие его на транспорт или в отвал.
2. Землеройно-транспортные машины, которые осуществляют наряду с копанием грунта его транспортирование к месту отвала. По типу рабочего органа эти машины делятся на ножевые и ковшовые; к ножевым относятся бульдозеры и грейдеры, к ковшовым – скреперы.
Указанные машины по своей классификации представляют собой большое разнообразие, что вызывает определённые трудности в их рациональном выборе для работы в конкретных условиях. Это требует изучения методики сравнительного анализа их технико-экономических показателей.
2.2 Типовые структуры комплектов машин и технологические схемы
выполнения комплексно-механизированных земляных работ
2.2.1 Землеройные машины
Для разработки выемок большой глубины используются экскаваторы. При комплексно-механизированной разработке грунта кроме ведущей землеройной машины (одноковшового экскаватора) в комплект также включаются вспомогательные машины для транспортировки грунта. В качестве вспомогательных машин используются: автосамосвалы, железнодорожный транспорт, конвейеры и др.
Технологические возможности экскаватора зависят от вида рабочего оборудования.
Экскаваторы с рабочим оборудованием «прямая лопата» (рисунок 2.1) целесообразно применять для разработки выемок выше уровня стоянки экскаватора и при отсутствии грунтовых вод или незначительном их притоке, а также при разработке грунтов с погрузкой в транспорт.
При разработке грунта ниже уровня стоянки экскаватора и обводнённых грунтов - предпочтительнее применять экскаваторы с рабочим оборудованием «обратная лопата», «грейфер» «драглайн» (рисунки 2.2, 2.3, 2.4).
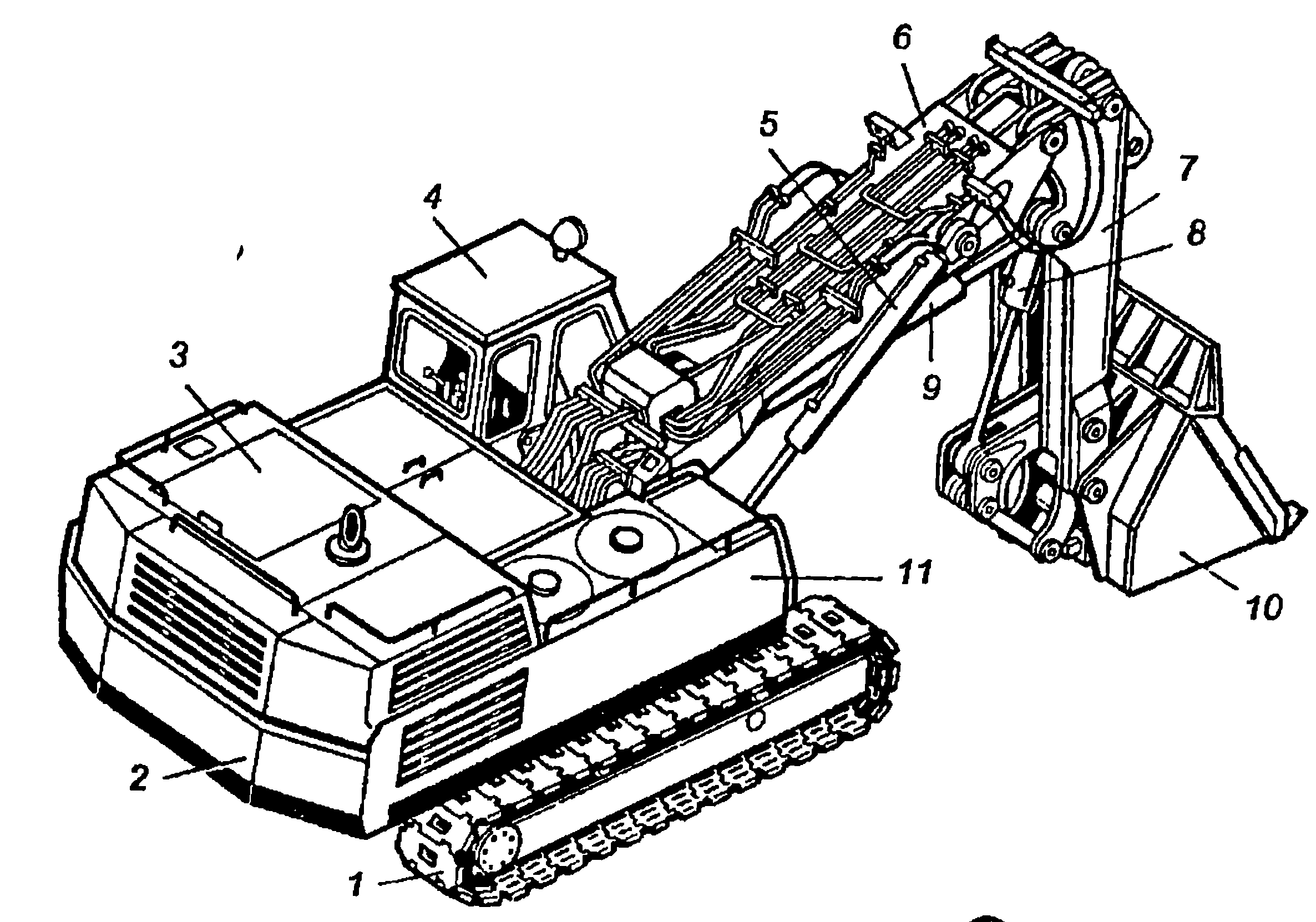
1-ходовая тележка; 2-противовес; 3-капот; 4-кабина; 5,8,9-гидроцилиндры стрелы, ковша и рукояти; 6-стрела; 7-рукоять; 10-ковш; 11-поворотная платформа
Рисунок 2.1-Гусеничный экскаватор с оборудованием «прямая лопата»
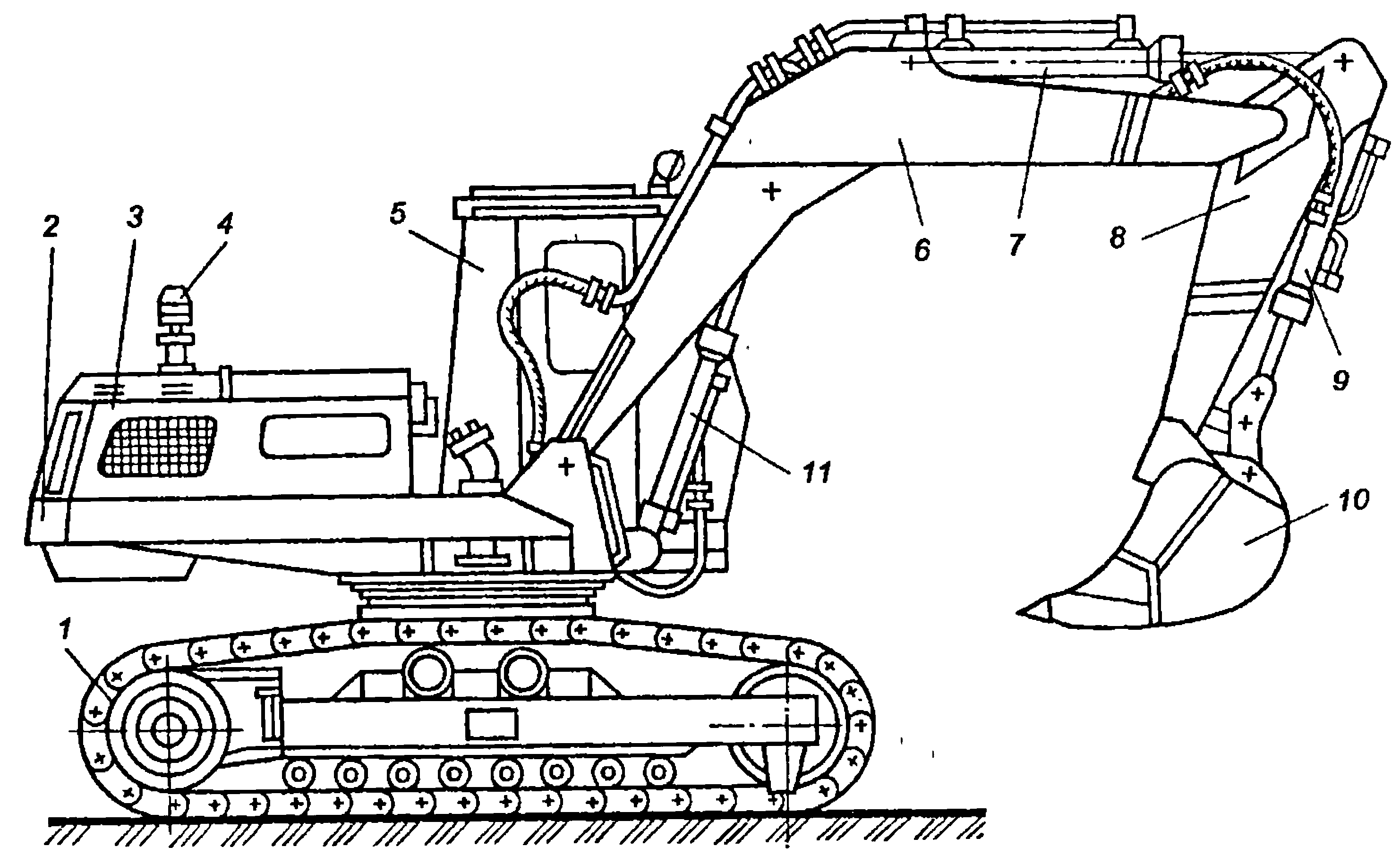
1-ходовая тележка; 2-поворотная платформа; 3-карот; 4-силовая установка; 5-кабина; 6-стрела; 7,9,11-гидроцилиндры рукояти, ковша и стрелы; 8-рукоять; 10-ковш
Рисунок 2.2-Гусеничный экскаватор с оборудованием «обратная лопата»
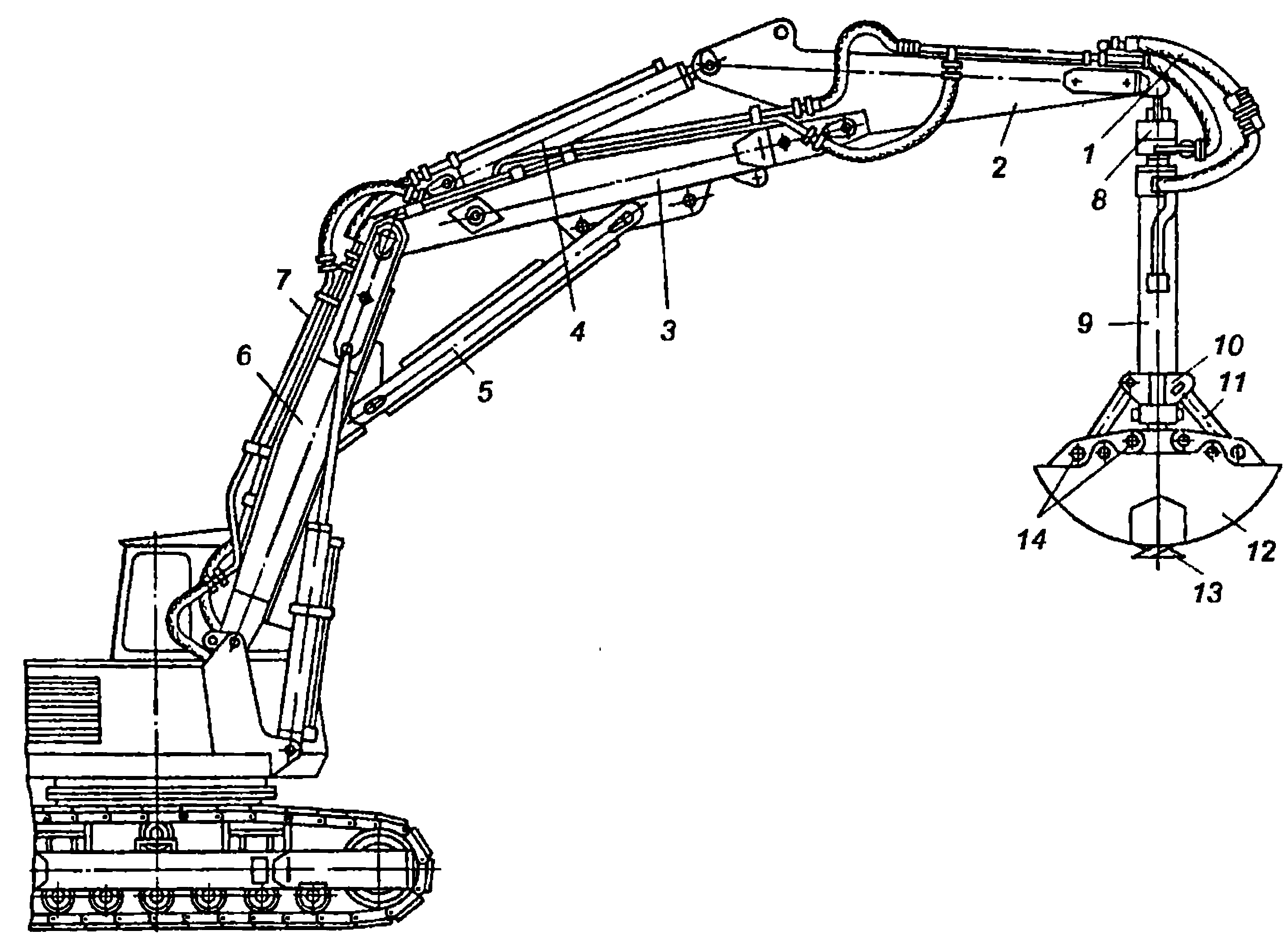
1,7-гидроприводы; 2-рукоять; 3-головная часть стрелы; 4-гидроцилиндр рукояти; 5,11-тяги; 6-базовая часть стрелы; 8 поворотная головка; 9-рама; 10-ползун; 12-челюсть ковша; 13-зубья ковша; 14-оси
Рисунок 2.3- Гусеничный экскаватор с оборудованием «грейфер»
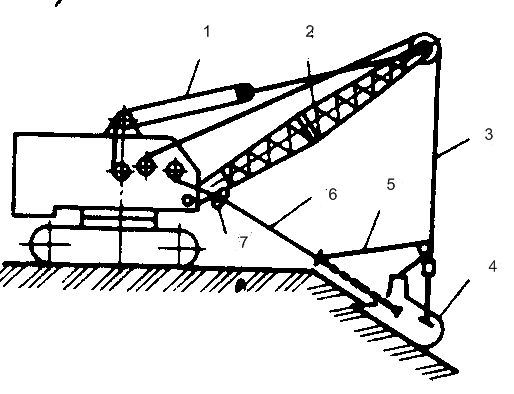
1-подъёмный полиспаст; 2-стрела; 3,5,6- подъёмный, разгрузочный, тяговый канаты; 4-ковш; 7-система направляющих блоков
Рисунок 2.4- Гусеничный экскаватор с оборудованием «драглайн»
Разработку грунта в глубоких траншеях с креплением вертикальных стенок, а также в колодцах - рациональнее использовать грейферный ковш экскаватора.
Разработка грунта и место стоянки экскаватора располагается в пространстве, называемым экскаваторным забоем. Профили экскаваторных забоев и их основные геометрические параметры представлены на рисунке 2.5.
Выемка, образующаяся в результате последовательной разработки грунта при периодическом движении экскаватора в забое, называется экскаваторной проходкой. В зависимости от расположения экскаватора и его перемещения в процессе разработки различают лобовую (торцовую) и боковую проходки. Схемы различных проходок экскаваторов представлены на рисунках 2.6 и 2.7.
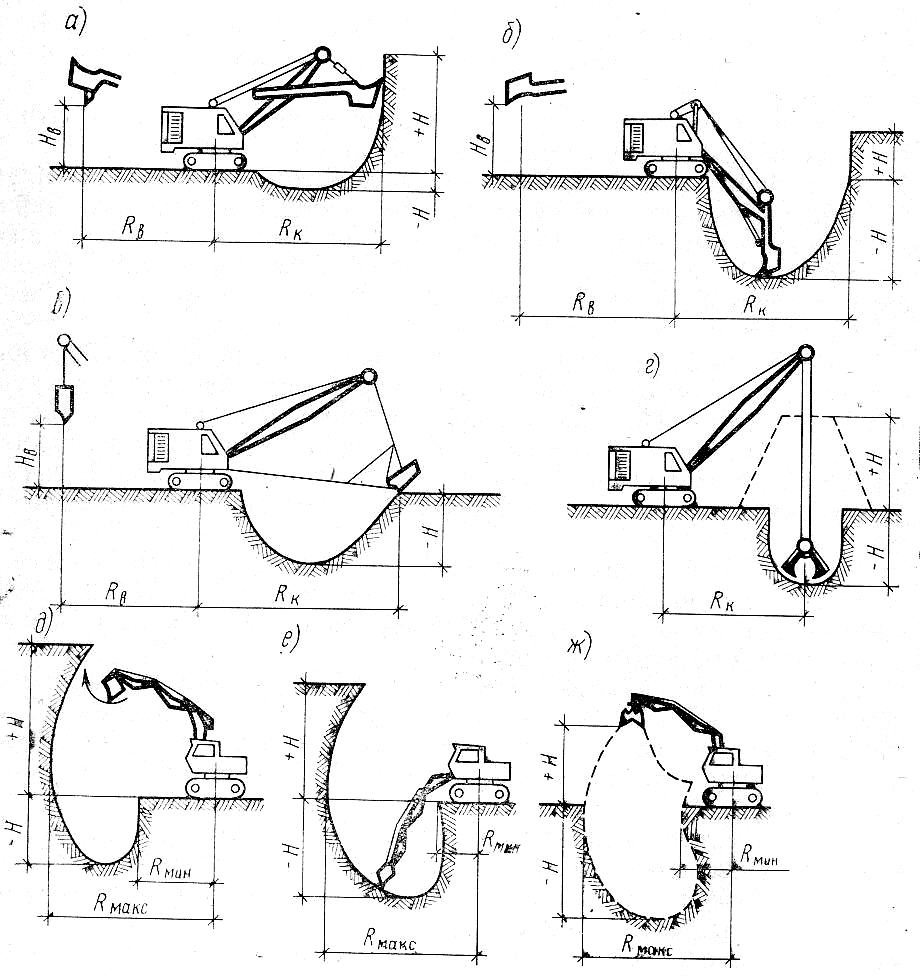
а,б,в,г - прямая лопата, обратная лопата, драглайн, грейфер с канатно-блочным управлением;
д,е,ж - прямая лопата, обратная лопата, грейфер с гидравлическим управлением ;
R К -радиус копания; R в – радиус выгрузки; +Н – высота копания; -Н – глубина копания; Н В –высота выгрузки
Рисунок 2.5 – Профили забоев экскаваторов с различным рабочим оборудованием
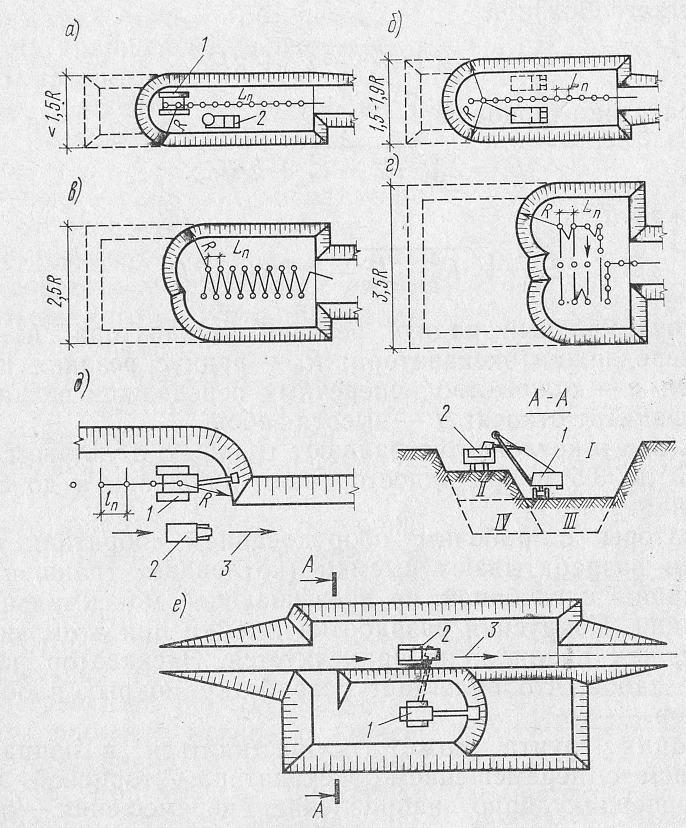
а, б) – лобовая(торцовая) проходка с односторонним и двусторонним расположением транспорта; в) - уширенная лобовая проходка с движением экскаватора «зигзаг»; г) - поперечно-торцовая проходка; д ) - боковая проходка; е) - разработка котлована по ярусам; I,II,III,IY –яруса разработки; 1-экскаватор; 2-автосамосвал; 3-направление движения транспорта
Рисунок 2.6-Схемы экскаваторных проходок с рабочим оборудованием «прямая лопата»
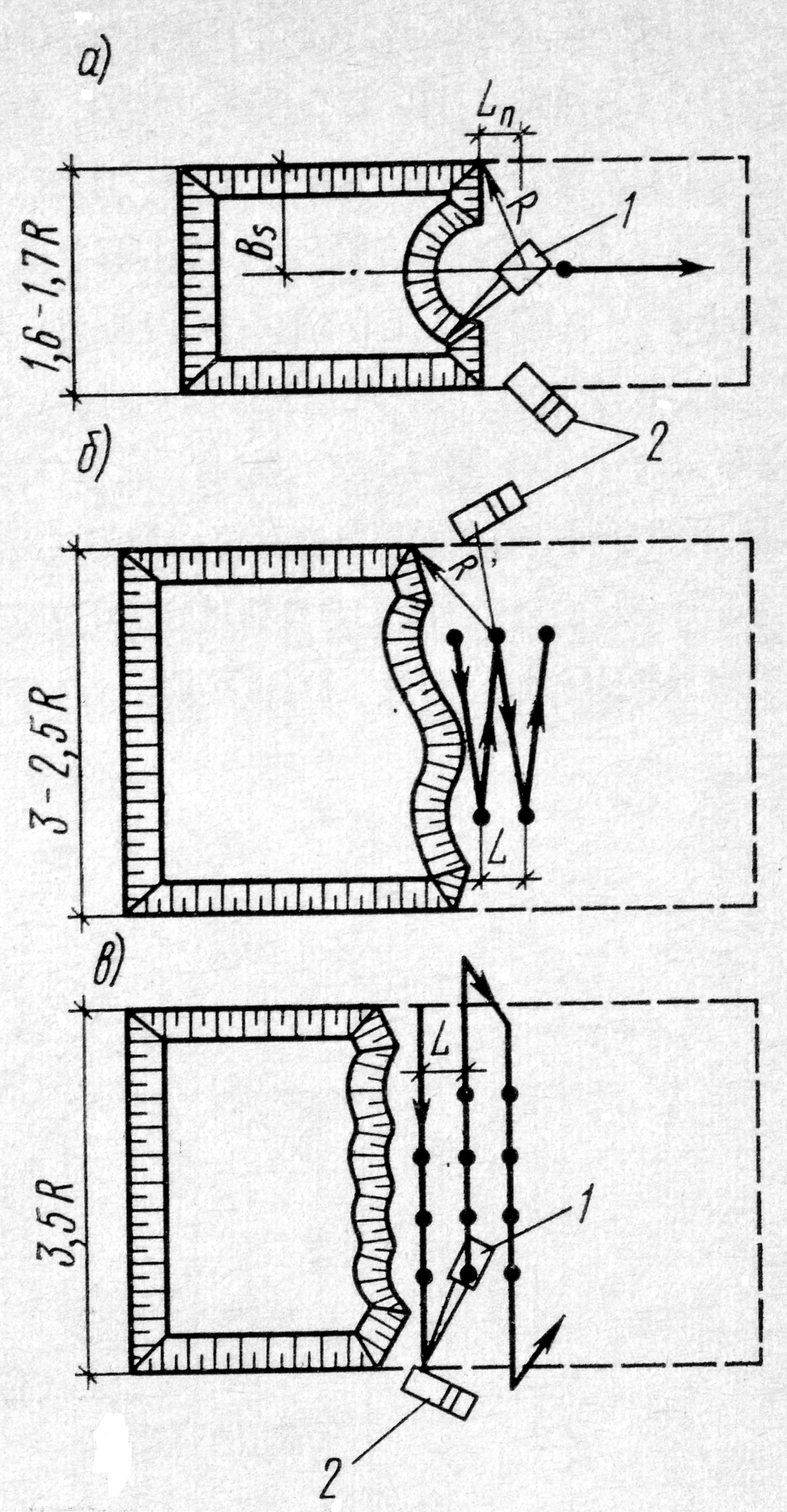
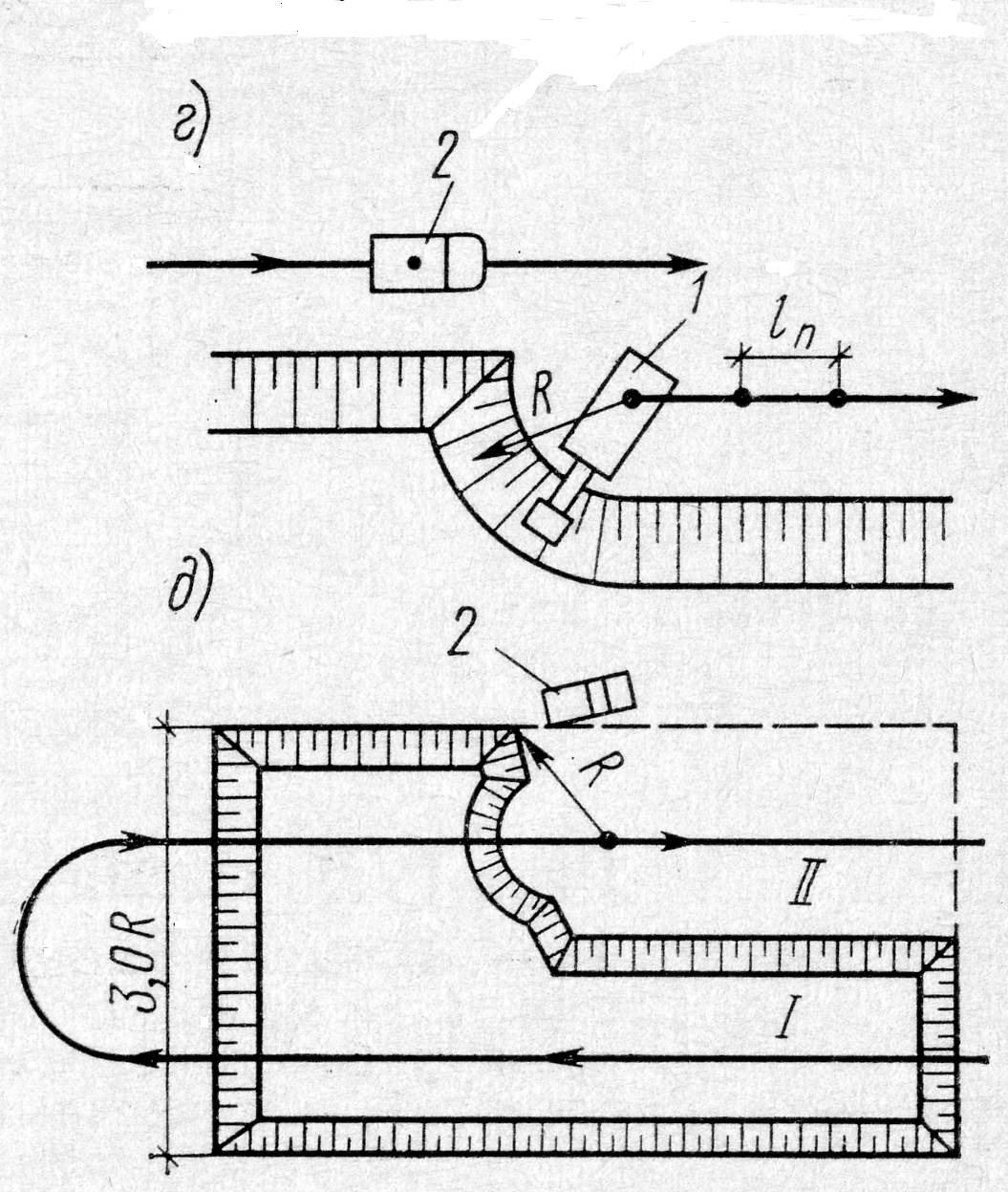
а) - лобовая проходка; б) - уширенная лобовая проходка; в) -поперечно-торцовая проходка; г) - боковая проходка; д) – разработка котлована двумя лобовыми проходками;
I и II – последовательность проходок; 1-экскаватор; 2-автосамосвал.
Рисунок 2.7 - Схемы проходок экскаватора с рабочим оборудованием «драглайн» и
«обратная лопата»:
Для разработки выемок постоянного профиля и большой протяжённости рационально применять многоковшовые экскаваторы. Они используются для разработки больших котлованов, траншей, прокладки каналов. Рабочий орган таких экскаваторов выполнен в виде ковшового ротора (роторный экскаватор) или рамы с ковшовой цепью (цепной экскаватор). Схемы работы многоковшовых экскаваторов и профили траншей представлены на
рисунке 2.8.
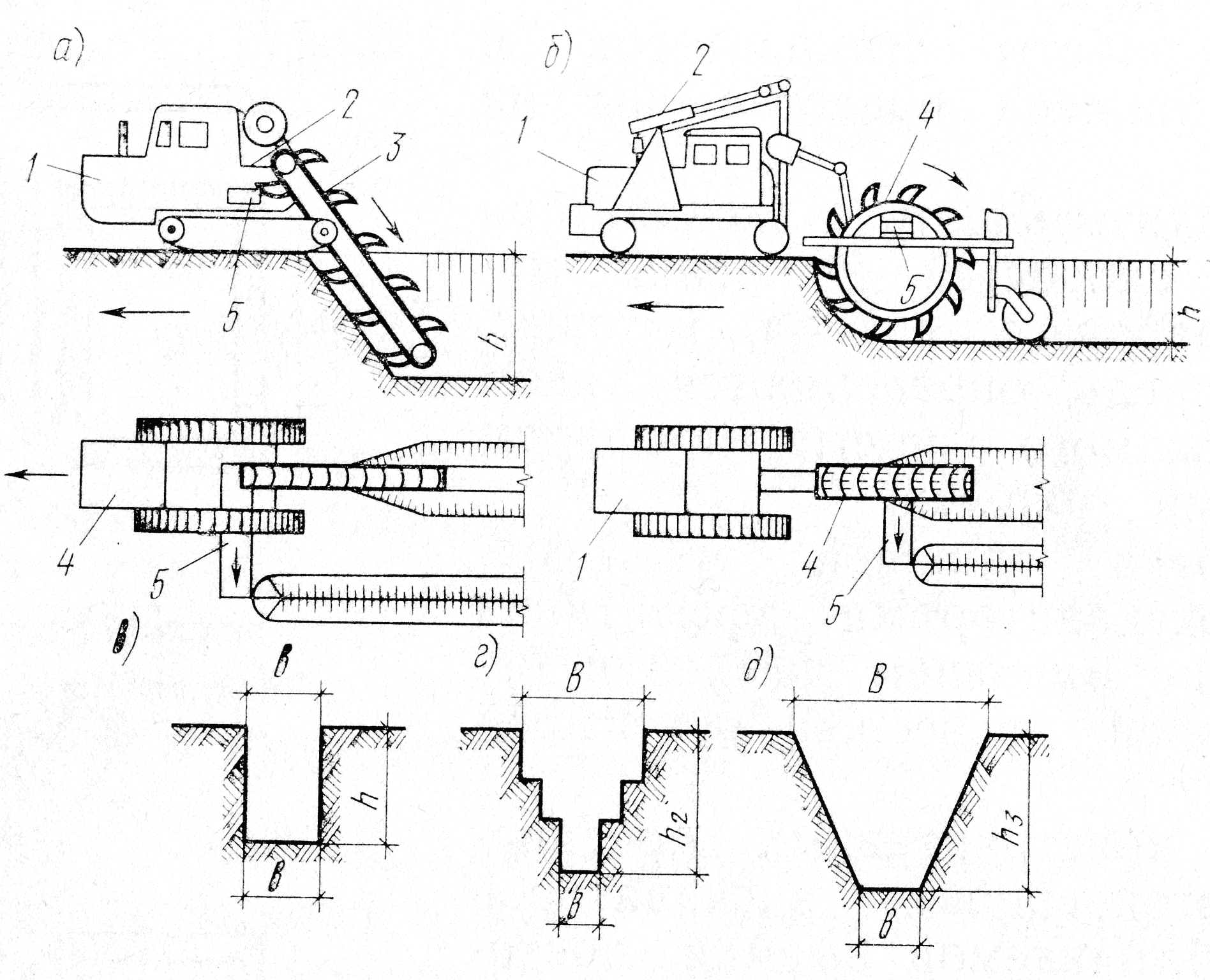
а) - экскаватор с ковшовой цепью; б) - роторный экскаватор; в, г, д) – профили траншей, разрабатываемых многоковшовыми экскаваторами; 1-базовая машина; 2-система управления рабочим органом; 3-ковшовая цепь; 4-ковшовый ротор; 5-ленточный транспортёр;
Рисунок 2.8 - Схемы работы многоковшовых экскаваторов