

2. Зубчатые передачи с параллельными осями колес.
О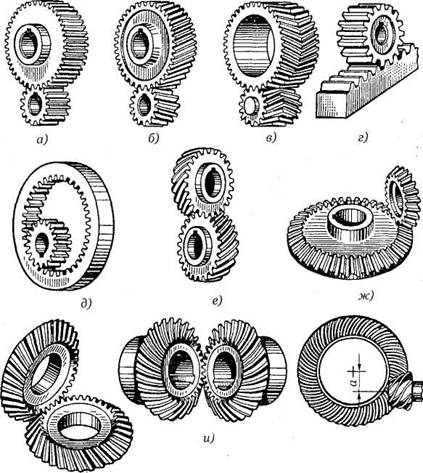 бщие
сведения и классификация зубчатых
передач
бщие
сведения и классификация зубчатых
передач
Механизм, в котором два подвижных звена являются зубчатыми колесами, образующими с неподвижным звеном вращательную или поступательную пару, называют зубчатой передачей (рис. 1).
Рис. 1. Виды зубчатых передач: а, б, в — цилиндрические зубчатые передачи с внешним зацеплением; г — реечная передача; д — цилиндрическая передача с внутренним зацеплением; е — зубчатая винтовая передача; ж, з, и— конические зубчатые передачи; к — гипоидная передача
В большинстве случаев зубчатая передача служит для передачи вращательного движения. В некоторых механизмах эту передачу применяют для преобразования вращательного движения в поступательное (или наоборот, см. рис. 1, г).
Зубчатые передачи — наиболее распространенный тип передач в современном машиностроении и приборостроении; их применяют в широких диапазонах скоростей (до 100 м/с), мощностей (до десятков тысяч киловатт).
Из перечисленных выше зубчатых передач наибольшее распространение получили цилиндрические прямозубые и косозубые передачи, как наиболее простые в изготовлении и эксплуатации.
Преимущественное распространение получили передачи с зубьями эвольвентного профиля, которые изготавливаются массовым методом обкатки на зубофрезерных или зубодолбежных станках. Достоинство эвольвентногозацепления состоит в том, что оно мало чувствительно к колебанию межцентрового расстояния.
Другие виды зацепления применяются пока ограниченно. Так, циклоидальное зацепление, при котором возможна работа шестерен с очень малым числом зубьев (2-3), не может быть, к сожалению, изготовлено современным высокопроизводительным методом обкатки, поэтому шестерни этого зацепления трудоемки в изготовлении и дороги; новое пространственное зацепление Новикова пока еще не получило массового распространения, вследствие большой чувствительности к колебаниям межцентрового расстояния.
Прямозубые колёса (около 70%) применяют при невысоких и средних скоростях, когда динамические нагрузки от неточности изготовления невелики, в планетарных, открытых передачах, а также при необходимости осевого перемещения колёс.
Косозубые колёса (более 30%) имеют большую плавность хода и применяются для ответственных механизмов при средних и высоких скоростях.
Шевронные колёса имеют достоинства косозубых колёс плюс уравновешенные осевые силы и используются в высоконагруженных передачах.
Конические передачи применяют только в тех случаях, когда это необходимо по условиям компоновки машины; винтовые — лишь в специальных случаях.
Колёса внутреннего зацепления вращаются в одинаковых направлениях и применяются обычно в планетарных передачах.
Экзаменационный билет № 29
1. Динамическая модель механизма. Приведенный момент сил.
Динамическая модель - модель системы, предназначенная для исследования ее свойств в функции времени (или модель системы, предназначенная для исследования в ней динамических явлений).
Приведенная масса механизма
У словно заменим механизм его динамической моделью. Например, кривошипно-ползунный механизм (рис. 4.2) заменим динамической моделью, состоящей из стойки и кривошипа.
Рис. 5.2. Замена кривошипно-ползунного механизма динамической моделью
Здесь ОА – звено приведения механизма, в котором как бы сосредоточена инертность всех звеньев механизма, А – точка приведения.
Уравнение (1) умножим и разделим на квадрат скорости точки приведения VA:
Выражение в квадратных скобках имеет размерность массы (кг) и называется приведенной массой mпр механизма в точке А.
Тогда
где
. (2)
Приведенной массой механизма называется такая условная масса, которая как бы сосредоточена в точке приведения механизма, кинетическая энергия которой равна сумме кинетических энергий всех звеньев механизма.
2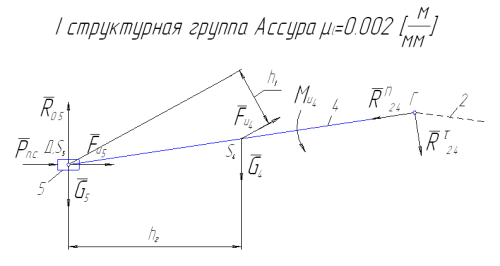 .
Кинетостатика структурных групп
(пример).
Рисунок
17 – Первая структурная группа
Ассура
Здесь
.
Кинетостатика структурных групп
(пример).
Рисунок
17 – Первая структурная группа
Ассура
Здесь ![]() и
и ![]() –
силы реакций, приложенные соответственно
к звеньям 5 и 4 со стороны звеньев,
образующих кинематические пары.
Запишем
уравнение суммы моментов относительно
точки Д:
–
силы реакций, приложенные соответственно
к звеньям 5 и 4 со стороны звеньев,
образующих кинематические пары.
Запишем
уравнение суммы моментов относительно
точки Д:
![]()
![]() В
группе Ассура осталось две неизвестных
силы, их можно определить составлением
векторного силового многоугольника.
Записываем
уравнение равновесия (векторную сумму
сил):
В
группе Ассура осталось две неизвестных
силы, их можно определить составлением
векторного силового многоугольника.
Записываем
уравнение равновесия (векторную сумму
сил):
![]() .
Масштабный
коэффициент сил
.
Масштабный
коэффициент сил ![]() :
:
![]() ,
г
,
г де
де ![]() –
истинное значение известной максимальной
силы, входящей в уравнение;
–
истинное значение известной максимальной
силы, входящей в уравнение; ![]() –
длина этой силы на плане скоростей.
Примем
масштабный коэффициент сил:
–
длина этой силы на плане скоростей.
Примем
масштабный коэффициент сил:![]() .
Строим
многоугольник сил, для этого, сначала
рассчитаем длины векторов сил на плане
сил:
.
Строим
многоугольник сил, для этого, сначала
рассчитаем длины векторов сил на плане
сил:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
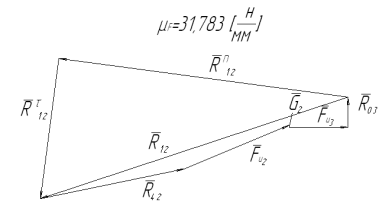
Рисунок
18 – План сил для первой группы Ассура
Из
произвольной точки строим вектор
.
Рисунок
18 – План сил для первой группы Ассура
Из
произвольной точки строим вектор ![]() ,
потом из конца этого вектора вектор
,
потом из конца этого вектора вектор ![]() и
так далее. Завершают многоугольник
сил, проводя из начала вектора
прямую
параллельную ДГ, а из конца
вектора
и
так далее. Завершают многоугольник
сил, проводя из начала вектора
прямую
параллельную ДГ, а из конца
вектора ![]() прямую
перпендикулярную ДА. Точка пересечения
этих прямых позволяет построить
силы
прямую
перпендикулярную ДА. Точка пересечения
этих прямых позволяет построить
силы![]() и
и ![]() на
плане сил и определить их истинное
значение.
на
плане сил и определить их истинное
значение.
![]() ,
,
![]() ,
,
![]() .
.
5 .2
Силовой расчёт второй группы Ассура
Рисунок
19 – Вторая структурная группа
Ассура
Здесь
.2
Силовой расчёт второй группы Ассура
Рисунок
19 – Вторая структурная группа
Ассура
Здесь ![]() и
и ![]() –
силы реакций, приложенные соответственно
к звеньям 3 и 2 со стороны звеньев,
образующих кинематические пары.
Сила
реакции со стороны четвёртого звена
на второе:
–
силы реакций, приложенные соответственно
к звеньям 3 и 2 со стороны звеньев,
образующих кинематические пары.
Сила
реакции со стороны четвёртого звена
на второе:
![]() Запишем
уравнение суммы моментов относительно
точки В:
Запишем
уравнение суммы моментов относительно
точки В:
![]() ,
,
 Записываем
уравнение равновесия (векторную сумму
сил):
Записываем
уравнение равновесия (векторную сумму
сил):
![]() .
Примем
масштабный коэффициент сил, для плана
сил второй группы Ассура:
.
Примем
масштабный коэффициент сил, для плана
сил второй группы Ассура:
![]() .
Строим
многоугольник сил, для этого, сначала
рассчитаем длины векторов сил на плане
сил:
.
Строим
многоугольник сил, для этого, сначала
рассчитаем длины векторов сил на плане
сил:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
 Рисунок
20 – План сил для второй группы Ассура
Из
произвольной точки строим вектор
Рисунок
20 – План сил для второй группы Ассура
Из
произвольной точки строим вектор ![]() ,
потом из конца этого вектора вектор
,
потом из конца этого вектора вектор ![]() и
так далее. Завершают многоугольник
сил, проводя из начала вектора
прямую
параллельную ^ ВБ, а из конца
вектора
и
так далее. Завершают многоугольник
сил, проводя из начала вектора
прямую
параллельную ^ ВБ, а из конца
вектора ![]() прямую
перпендикулярную АВ. Точка пересечения
этих прямых позволяет построить
силы
прямую
перпендикулярную АВ. Точка пересечения
этих прямых позволяет построить
силы ![]() и
и ![]() на
плане сил и определить их истинное
значение. Вектор
на
плане сил и определить их истинное
значение. Вектор ![]() не
строят вследствие их малости.
не
строят вследствие их малости.
![]() ,
,
![]() ,
,
![]() .
.