

Экзаменационный билет № 10
1. Основные понятия: машина, механизм, звено, кинематическая пара, кинематическая цепь.
Машина – это техническое устройство, выполняющее преобразование энергии материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Механизмом называется система твердых тел предназначенных для передачи и преобразования заданного движения одного или нескольких тел в требуемое движение других тел.
Звено механизма – это одна или несколько неподвижно соединенных между собой деталей. Звенья могут быть подвижные и неподвижные. Звено неподвижное относительно системы координат выбранное за неподвижную наз-ся стойкой. В механизме стойка одна. Звенья, имеющие возможность относительного перемещения наз-ся подвижными.
Кинематической парой называется подвижное соединение двух соприкасающихся звеньев.
Кинематическая цепь – это система звеньев образующих между собой кинематические пары. Кинематические цепи могут быть замкнутые и не замкнутые, простые и сложные, плоские и пространственные.
2. Определение угловых скоростей и ускорений графоаналитическим методом.
Планы скоростей и ускорений кривошипно-ползунного механизма
Последовательность
построения планов скоростей и ускорений
кривошипно-ползунного механизма (рис.
3.10) аналогична той, которая приведена
в предыдущем случае. В дальнейшем
некоторые подробности (расчёты масштабов,
длин ![]() ,
масштабов планов скоростей
,
масштабов планов скоростей ![]() и
ускорений
и
ускорений ![]() и
т.д.) будут пропущены.
и
т.д.) будут пропущены.
План скоростей
кривошипно-ползунного механизма начинают
строить после построения плана механизма
в заданном положении, в выбранном
масштабе длин ![]() ,
составления векторного уравнения
скоростей и выбора масштаба плана
скоростей
.
,
составления векторного уравнения
скоростей и выбора масштаба плана
скоростей
.
Векторное уравнение скоростей шатуна 2 (рис. 3.10)
![]()
где ![]() –
скорость точки А, м/с; вектор этой
скорости направлен перпендикулярно
прямой ОА кривошипа 1 (рис. 3.10) на
плане механизма; VВА – вектор
скорости точки В относительно А;
имеет направление, перпендикулярное
прямой АВ на плане механизма; VВ –
вектор полной (абсолютной), скорости
ползуна 3; должен быть параллельным
направлению движения ползуна.
–
скорость точки А, м/с; вектор этой
скорости направлен перпендикулярно
прямой ОА кривошипа 1 (рис. 3.10) на
плане механизма; VВА – вектор
скорости точки В относительно А;
имеет направление, перпендикулярное
прямой АВ на плане механизма; VВ –
вектор полной (абсолютной), скорости
ползуна 3; должен быть параллельным
направлению движения ползуна.
Для построения плана скоростей сначала из полюса плана Рv (рис. 3.10) проводится вектор скорости точки А относительно О – VА, т.е. векторный отрезок Рva. Затем через точку а проводится перпендикуляр к прямой АВ плана механизма и через полюс Рv – прямая, параллельная движению ползуна 3. На пересечении этих двух прямых получается точка b. Направления векторов скоростей VВ и VВА обозначают стрелками.
Н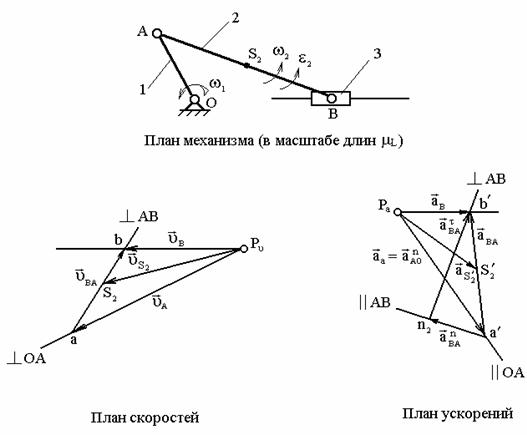 апример,
необходимо определить скорость точки S2,
принадлежащей шатуну 2 и расположенной
на середине отрезка АВ. Используя
теорему подобия, на отрезке ab плана
скоростей находят его середину
(точка S2), которая, будучи соединенной
с полюсом Рv, даст вектор VS2,
изображающий абсолютную (полную)
скорость точки S2.
апример,
необходимо определить скорость точки S2,
принадлежащей шатуну 2 и расположенной
на середине отрезка АВ. Используя
теорему подобия, на отрезке ab плана
скоростей находят его середину
(точка S2), которая, будучи соединенной
с полюсом Рv, даст вектор VS2,
изображающий абсолютную (полную)
скорость точки S2.
Рис. 3.10. Построение планов скоростей и ускорений кривошипно-ползунного механизма
Рассчитаем величину линейных скоростей и угловую скорость шатуна:
![]() ,
м/с,
,
м/с,
![]() ,
м/с,
,
м/с,
![]() ,
м/с,
,
м/с,
![]() ,
с-1.
,
с-1.
Направление вектора угловой скорости шатуна определяется следующим образом. Вектор скорости VВА условно переносится в точку В плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и направлена угловая скорость шатуна.
План ускорений кривошипно-ползунного механизма строят после того, как будет составлено векторное уравнение ускорений шатуна, учитывая, что он совершает сложное движение:
![]()
где аА – ускорение точки А; его величину и направление можно определить, используя векторное уравнение ускорения точки А относительно оси О вращения кривошипа:
![]()
причём ускорение
точки А относительно О можно
разложить на две составляющие –
нормальное ускорение ![]() и
тангенциальное
и
тангенциальное ![]() ,
т.е.
,
т.е.
![]()
Так как
точка О неподвижна и ускорение
её равно нулю (![]() и
и ![]() при
условии, что угловая скорость вращения
кривошипа постоянна:
при
условии, что угловая скорость вращения
кривошипа постоянна: ![]() и
его угловое ускорение
и
его угловое ускорение ![]() ),
то векторное уравнение ускорения
точки А можно записать в виде
),
то векторное уравнение ускорения
точки А можно записать в виде
![]()
Величина нормальной составляющей ускорения (нормальное ускорение) рассчитывается по формуле
![]()
(его вектор направлен по радиусу вращения кривошипа от точки А к точке О).
Затем вычисляется нормальное ускорение точки В относительно А по формуле
![]()
(его вектор направлен от В к А).
После выбора
масштаба плана ускорений по формуле ![]()
величина нормального
ускорения ![]() переводится
этим масштабом в векторный отрезок
длиной
переводится
этим масштабом в векторный отрезок
длиной
 ,
мм.
,
мм.
Затем строится
план ускорений (см. рис. 3.10). Из произвольно
выбранного полюса Ра параллельно
отрезку ОА плана механизма
проводится вектор ускорения
,
длина которого ![]() была
выбрана произвольно при расчёте
масштаба
.
Из конца этого вектора (точки
была
выбрана произвольно при расчёте
масштаба
.
Из конца этого вектора (точки ![]() )
проводится вектор ускорения
длиной
)
проводится вектор ускорения
длиной ![]() ,
который должен быть параллелен
отрезку АВ плана механизма и
направлен от точки В к А.
Перпендикулярно ему через точку n2 проводят
прямую до пересечения с прямой,
проведённой через полюс Ра параллельно
линии движения ползуна 3. Полученная
точка их пересечения b' определяет
длины векторов ускорений aBA и aB.
,
который должен быть параллелен
отрезку АВ плана механизма и
направлен от точки В к А.
Перпендикулярно ему через точку n2 проводят
прямую до пересечения с прямой,
проведённой через полюс Ра параллельно
линии движения ползуна 3. Полученная
точка их пересечения b' определяет
длины векторов ускорений aBA и aB.
Для нахождения величины ускорения точки S2, принадлежащей шатуну, можно применить теорему подобия. При этом необходимо на векторе, изображающем на плане ускорений относительное ускорение aBA, найти соответствующую точку S2', делящую отрезок a'b' в той же пропорции, что и точка S2 делит отрезок АВ на плане механизма.
Угловое ускорение шатуна вычисляется по формуле
![]() ,
с-1,
,
с-1,
где n2b' –
длина вектора на плане ускорений,
изображающего тангенциальное ускорение ![]() .
.
Для определения
направления вектора углового ускорения
шатуна ![]() необходимо
вектор тангенциального ускорения
условно
перенести в точку В плана механизма.
Куда он будет вращать шатун относительно
точки А, в ту сторону и направлено
ускорение
шатуна.
необходимо
вектор тангенциального ускорения
условно
перенести в точку В плана механизма.
Куда он будет вращать шатун относительно
точки А, в ту сторону и направлено
ускорение
шатуна.