

2. Определение угловых скоростей, по плану скоростей.( значение и направление)
Угловые скорости вращения звеньев определяются на основе построенного плана скоростей. Модуль угловой скорости второго звена можно найти по формуле.
Для определения направления необходимо мысленно перенести вектор относительной скорости в точку Bмеханизма. Направление вектора скорости указывает, что точка B относительно точки A вращается по часовой стрелке. Звено 3 модуля и направления угловой скорости не имеет, так как оно совершает возвратно-поступательное движение. Направление угловых скоростей показываем на схеме механизма круговыми стрелками.
Определение угловых скоростей звеньев.
На плане угловых скоростей состояние планетарной коробки передач с тремя степенями свободы на любой передаче характеризуется соответствующей рабочей точкой, образованной двумя пересекающимися нулевыми прямыми. При этом звенья вращаются с определенны-ми угловыми скоростями, которые можно определить по плану угловых скоростей.
Пусть требуется определить угловую скорость звена q (рис.15) на одной из передач, которая осуществляется включением тормозов звеньев р и r и характеризуется на плане угловых скоростей точкой пересечения нулевых прямых этих звеньев. Так как кинематические связи между звеньями планетарной коробки передач определяются линейными уравнениями с постоянными коэффициентами и во всех точках прямой, проходящей через масштабную точку е параллельно нулевой прямой q, угловая скорость рассматриваемого звена равна угловой скорости ведущего вала ( ωq = 1 ) , можно записать
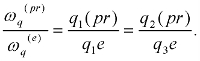
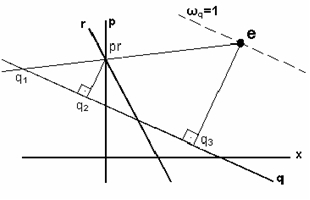
Таким образом, угловая скорость любого звена планетарной коробки передач с тремя степенями свободы на плане характеризуется своей координатной осью, которой служит соответствующая этому звену нулевая прямая, и своим масштабом, равным расстоянию от нулевой прямой до масштабной точки. Нетрудно догадаться, что нулевая прямая qделит плоскость картера ( ωπ = 0 ) на две полуплоскости, одна из которых определяет отрицательные значения угловой скорости звена q, а другая положительные значения этой величины. Очевидно, что полуплоскость, содержащая масштабную точку е, должна определять положительные значения угловой скорости звена q.
Экзаменационный билет № 26
1. Динамическая модель механизма. Приведенный момент инерции.
Динамическая модель - модель системы, предназначенная для исследования ее свойств в функции времени (или модель системы, предназначенная для исследования в ней динамических явлений).
Приведенный момент инерции
Так как ![]() ,
где
,
где ![]() –
длина звена приведения,
–
длина звена приведения, ![]() –
его угловая скорость, то кинетическую
энергию механизма можно выразить
уравнением
–
его угловая скорость, то кинетическую
энергию механизма можно выразить
уравнением
![]()
где приведенный момент инерции механизма
 . (3)
. (3)
Приведенным моментом инерции механизма называется такой условный момент инерции, которым как бы обладает звено приведения относительно оси вращения, кинетическая энергия которого (при таком моменте инерции) равна сумме кинетических энергий всех звеньев механизма.
Величины mпр и Jпр не являются постоянными для данного механизма, а меняют свое численное значение в зависимости от положений звеньев, так как звенья меняют свои скорости.