

Экзаменационный билет № 27
1. Динамическая модель механизма. Приведенный момент сил.
Динамическая модель - модель системы, предназначенная для исследования ее свойств в функции времени (или модель системы, предназначенная для исследования в ней динамических явлений).
Приведенная масса механизма
Условно заменим механизм его динамической моделью. Например, кривошипно-ползунный механизм (рис. 4.2) заменим динамической моделью, состоящей из стойки и кривошипа.
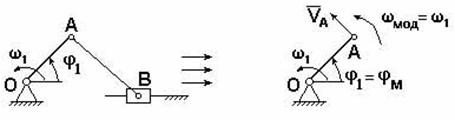 Рис.
5.2. Замена кривошипно-ползунного
механизма динамической моделью
Рис.
5.2. Замена кривошипно-ползунного
механизма динамической моделью
Здесь ОА – звено приведения механизма, в котором как бы сосредоточена инертность всех звеньев механизма, А – точка приведения.
Уравнение (1) умножим и разделим на квадрат скорости точки приведения VA:
![]()
Выражение в квадратных скобках имеет размерность массы (кг) и называется приведенной массой mпр механизма в точке А.
Тогда
![]()
где
![]() . (2)
. (2)
Приведенной массой механизма называется такая условная масса, которая как бы сосредоточена в точке приведения механизма, кинетическая энергия которой равна сумме кинетических энергий всех звеньев механизма.
2. Понятие механизма, звена, кинематической пары.
Машина – это устройство, выполняющее механические движения для преобразования энергии, материалов или информации. Различают группы машин: 1. Энергетические (ДВС), 2. Технологические (станки, прессы). 3. Информационные (преобразование и переработка информации). Механизм – это устройство, выполняющее преобразование движения одного или нескольких твердых тел в требуемое движение других твердых тел. Звено – это одно или несколько жестко соединенных твердых тел, входящих в состав механизма. В каждом механизме имеется стойка (звено неподвижное или принимаемое за неподвижное). Звенья подразделяются на: неподвижные (стойка, неподв. направляющая) и подвижные (кривошип, шатун, коромысло, ползун, кулиса, кулачок). Входное звено – это звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев. Выходное звено – это звено, совершающее движение, для выполнения которого предназначен механизм. Кинематическая пара – это подвижное соединение двух соприкасающихся звеньев. По характеру соприкосновения звеньев различают низшие и высшие кинематические пары. Низшие пары могут быть выполнены соприкосновением звеньев по поверхностям или по плоскостям. Высшие – соприкосновением по линиям или в точках.
Экзаменационный билет № 28
1. Понятие структурной группы (группы Ассура). Классификация структурных групп.
Структу́рная гру́ппа Ассу́ра (также просто гру́ппа Ассу́ра) — это образованная только подвижными звеньями механизма кинематическая цепь, подвижность которой равна нулю.
Группа названа именем Леонида Владимировича Ассура, который и разработал методику их образования
Приведенное определение группы Ассура -- неполное и неточное. Во-первых, оно не включает столь важный признак как неделимость на более простые нулевые группы. Во-вторых, слово "механизм" весьма обедняет данное определение, потому что группы Ассура стали широко использоваться в теории строительных сооружений. В-третьих, метод развития поводка, разработанный проф. Л. Ассуром, ограничен получением так называемого фундаментального ряда; а структурный синтез групп Ассура ведется и по сей день.