

Экзаменационный билет № 17
1. Классификация кинематических пар (примеры). Кинематические цепи. Определение механизма через кц.
Классификация кинематических пар
Кинематические пары (КП) классифицируются по следующим признакам:
1) по виду места контакта (места связи) поверхностей звеньев:
- низшие, в которых контакт звеньев осуществляется по плоскости или поверхности (пары скольжения);
- высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием). Они имеются, например, в зубчатых и кулачковых механизмах).

2) по относительному движению звеньев, образующих пару:
- вращательные;
![]()
- поступательные;
![]()
- цилиндрические;
![]()
- сферические;
![]()
- винтовые;
- плоские.
плоские.
М еханизм,
звенья которого образуют только
вращательные, поступательные,
цилиндрические и сферические пары,
называют рычажным.
еханизм,
звенья которого образуют только
вращательные, поступательные,
цилиндрические и сферические пары,
называют рычажным.
3) по способу замыкания (обеспечения контакта звеньев пары):
- силовое (за счет действия сил веса или силы упругости пружины);
- геометрическое (за счет конструкции рабочих поверхностей пары).
4) по числу подвижностей в относительном движении звеньев.
5) по числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары);
Тело, находясь в пространстве (в декартовой системе координат X, Y, Z) имеет 6 степеней свободы. Оно может перемещаться вдоль каждой из трёх осей X, Y и Z, а также вращаться вокруг каждой оси (рис. 2.3). Если тело (звено) образует с другим телом (звеном) кинематическую пару, то оно теряет одну или несколько из этих 6 степеней свободы.
К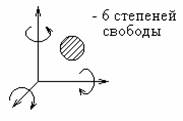
 инематические
цепи. Систему
звеньев, связанных между собой
кинематическими парами, называют
кинематической цепью. Если звенья
совершают движение в одной плоскости,
кинематическая цепь будет плоской, в
противном случае - пространственной.
В
зависимости от строения кинематическая
цепь может быть замкнутой и разомкнутой,
простой и сложной. В замкнутой
кинематической цепи (рис.3.1а, в) каждое
звено входит не менее чем в две
кинематические пары, в разомкнутой
цепи (рис. 3.1б, г) имеются звенья, входящие
лишь в одну кинематическую пару.
Простой
(рис. 3.1а, б) называют кинематическую
цепь, у которой каждое звено входит в
соединение с другим звеном с помощью
одной или двух кине-матических пар. В
противном случае цепь называют сложной
(рис.3.1 в, г).
Основные
виды механизмов
Исходя
из кинематических, конструктивных и
функциональных свойств, механизмы
подразделяют на:
1. Рычажные (рис.
3.2а, б)- предназначенные для преобразования
враща-тельного движения входного звена
в возвратно-поступательное движение
вы-ходного звена. Могут передавать
большие усилия и мощности.
2. Кулачковые (рис.
3.2в, г) - предназначенные для преобразования
вращательного или возвратно-поступательного
движения входного звена в
возвратно-поступательное или
возвратно-вращательное движение
выходного звена. Придавая профилям
кулачка и толкателя соответствующие
очертания всегда можно осуществить
любой желательный закон движения
толкателя.
3. Зубчатые (рис.
3.2е) - образованные с помощью зубчатых
колес. Слу-жат для передачи вращения
между неподвижными и подвижными осями.
Зуб-чатые передачи с параллельными
осями осуществляются при помощи
цилинд-рических зубчатых колес, с
пересекающимися осями - при помощи
конических зубчатых колес, а со
скрещивающимися осями - при помощи
червяка и червяч-ного
колеса.
4. Фрикционные (рис.
3.2д) - движение от ведущего звена к
ведомому пе-редается за счет сил трения,
возникающих в результате контакта этих
звеньев.
инематические
цепи. Систему
звеньев, связанных между собой
кинематическими парами, называют
кинематической цепью. Если звенья
совершают движение в одной плоскости,
кинематическая цепь будет плоской, в
противном случае - пространственной.
В
зависимости от строения кинематическая
цепь может быть замкнутой и разомкнутой,
простой и сложной. В замкнутой
кинематической цепи (рис.3.1а, в) каждое
звено входит не менее чем в две
кинематические пары, в разомкнутой
цепи (рис. 3.1б, г) имеются звенья, входящие
лишь в одну кинематическую пару.
Простой
(рис. 3.1а, б) называют кинематическую
цепь, у которой каждое звено входит в
соединение с другим звеном с помощью
одной или двух кине-матических пар. В
противном случае цепь называют сложной
(рис.3.1 в, г).
Основные
виды механизмов
Исходя
из кинематических, конструктивных и
функциональных свойств, механизмы
подразделяют на:
1. Рычажные (рис.
3.2а, б)- предназначенные для преобразования
враща-тельного движения входного звена
в возвратно-поступательное движение
вы-ходного звена. Могут передавать
большие усилия и мощности.
2. Кулачковые (рис.
3.2в, г) - предназначенные для преобразования
вращательного или возвратно-поступательного
движения входного звена в
возвратно-поступательное или
возвратно-вращательное движение
выходного звена. Придавая профилям
кулачка и толкателя соответствующие
очертания всегда можно осуществить
любой желательный закон движения
толкателя.
3. Зубчатые (рис.
3.2е) - образованные с помощью зубчатых
колес. Слу-жат для передачи вращения
между неподвижными и подвижными осями.
Зуб-чатые передачи с параллельными
осями осуществляются при помощи
цилинд-рических зубчатых колес, с
пересекающимися осями - при помощи
конических зубчатых колес, а со
скрещивающимися осями - при помощи
червяка и червяч-ного
колеса.
4. Фрикционные (рис.
3.2д) - движение от ведущего звена к
ведомому пе-редается за счет сил трения,
возникающих в результате контакта этих
звеньев.
С труктурный синтез и анализ механизмов Структурным синтезом механизма называется проектирование структурной схемы механизма, которая состоит из неподвижного и подвижных звеньев и кинематических пар. Он является начальной стадией составления схемы механизма, удовлетворяющего заданным условиям. Исходными данными обычно являются виды движения ведущего и рабочего звеньев механизма, взаимное расположение осей вращения и направления поступательного движения звеньев, их угловые и линейные перемещения, скорости и ускорения.Наиболее удобным методом нахождения структурной схемы является метод присоединения структурных групп Ассура к ведущему звену или основному механизму. Под структурным анализом механизма понимается определение количества звеньев и кинематических пар, определение степени подвижности механизма, а также установление класса и порядка механизма. Степень подвижности пространственного механизма определяется по формуле Сомова - Малышева:
W = 6n - (5P1 +4P2 + 3P3 + 2P4 + P5), (3.1)
где - число одно-, двух-,трех-, четырех- и пятиподвижных кине-матических пар; n - число подвижных звеньев. Степень подвижности плоского механизма определяется по формуле Чебышева:
, (3.2) где - число низших, а - число высших кинематических пар. Кинематическая цепь, число степеней свободы которой относительно элементов ее внешних кинематических пар равно нулю, называют структурной группой Ассура, по имени Л.В. Ассура, который впервые фундаментально исследовал и предложил структурную классификацию плоских стержневых механизмов. Пример образования плоского шестизвенного механизма дан на рис.3.4.
Структурные группы подразделяют по классу и порядку. Класс группы определяется максимальным числом кинематических пар входящих в одно зве-но (рис. 3.5).
![]()
Рис. 3.5
 Класс
и порядок механизма зависят от того,
какое звено является ведущим.
Класс
и порядок механизма зависят от того,
какое звено является ведущим.