

2. Силы, действующие на звенья механизма. Определение сил инерции и моментов инерции
Силы, действующие в механизмах
Различают две группы внешних сил.
Движущие силы Рдв или моменты движущих сил Мдв, которые:
- совершают положительную работу;
- направлены в сторону скорости точки приложения силы или под острым углом к ней;
- задаются посредством механической характеристики двигателя.
Пример: силы давления газа на поршень в двигателе внутреннего сгорания, силы веса при опускании груза и т.д.
Силы сопротивления РС и их моменты МС, которые:
- совершают отрицательную работу;
- направлены противоположно скорости.
В свою очередь силы сопротивления делятся на силы:
- полезного сопротивления Рп.с и моменты Мп.с (силы тяжести при подъеме груза);
- вредного сопротивления: трение в кинематических парах, сопротивление среды, внутреннее сопротивление (например, силы упругости звеньев).
Кроме этого существуют:
- силы веса
(тяжести) ![]() ,
где
,
где ![]() –
масса звена в кг;
–
масса звена в кг; ![]() м/с2 –
ускорение свободного падения. При
кинематическом исследовании считают,
что сила тяжести
м/с2 –
ускорение свободного падения. При
кинематическом исследовании считают,
что сила тяжести ![]() приложена
в центре тяжести звена. Если звено
выполнено в виде стержня, то его ц.т.
расположен в центре симметрии звена,
а если в виде ползуна, то в центре
шарнира. Силы тяжести в течении расчётного
цикла могут быть как движущими, так и
силами полезного сопротивления, поэтому
работа этих сил за цикл равна нулю. Эти
силы считаются внешними силами.
приложена
в центре тяжести звена. Если звено
выполнено в виде стержня, то его ц.т.
расположен в центре симметрии звена,
а если в виде ползуна, то в центре
шарнира. Силы тяжести в течении расчётного
цикла могут быть как движущими, так и
силами полезного сопротивления, поэтому
работа этих сил за цикл равна нулю. Эти
силы считаются внешними силами.
- силы инерции ![]() ;
;
- моменты сил
инерции ![]() ,
где m, JS – масса и массовый
момент инерции звена;
,
где m, JS – масса и массовый
момент инерции звена; ![]() и
и ![]() –
линейное и угловое ускорения;
–
линейное и угловое ускорения;
- силы реакций в
кинематических парах ![]() ,
возникающие в опорах звеньев и являющиеся
внутренними силами для механизма в
целом и внешними для каждого отдельного
звена.
,
возникающие в опорах звеньев и являющиеся
внутренними силами для механизма в
целом и внешними для каждого отдельного
звена.
С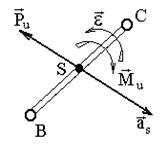 илы
инерции звеньев и моменты сил инерции. Так
как звенья механизма находятся в
движении, и имеют свои массы, то, особенно
в быстродействующих механизмах
рычажного типа, обязательно имеет место
неравномерность движения звеньев. Это
означает, что ускорения этих звеньев
не равны нулю, что приводит к возникновению
дополнительных сил динамического
характера в виде сил инерции
илы
инерции звеньев и моменты сил инерции. Так
как звенья механизма находятся в
движении, и имеют свои массы, то, особенно
в быстродействующих механизмах
рычажного типа, обязательно имеет место
неравномерность движения звеньев. Это
означает, что ускорения этих звеньев
не равны нулю, что приводит к возникновению
дополнительных сил динамического
характера в виде сил инерции ![]() и
моментов инерции
и
моментов инерции ![]() .
Из теоретической механики известно,
что все силы инерции звена, совершающего
плоскопараллельное движение и имеющего
плоскость симметрии, параллельную
плоскости движения, могут быть сведены
к силе инерции
,
приложенной в центре масс S звена,
и паре сил инерции, момент которых обозначим
(рис.
4.1).
.
Из теоретической механики известно,
что все силы инерции звена, совершающего
плоскопараллельное движение и имеющего
плоскость симметрии, параллельную
плоскости движения, могут быть сведены
к силе инерции
,
приложенной в центре масс S звена,
и паре сил инерции, момент которых обозначим
(рис.
4.1).
Рис. 4.1. Сила инерции звена и момента сил инерции
![]() –
главный вектор
сил инерции, или сила инерции;
–
главный вектор
сил инерции, или сила инерции;
![]() –
главный момент
сил инерции, или момент сил инерции; m –
масса звена;
–
главный момент
сил инерции, или момент сил инерции; m –
масса звена;
![]() –
массовый момент инерции относительно
центра масс;
–
массовый момент инерции относительно
центра масс;
![]() –
ускорение центра масс;
–
ускорение центра масс;
![]() –
угловое ускорение
звена.
–
угловое ускорение
звена.
![]() и
и ![]() направлены
в стороны, противоположные ускорениям
направлены
в стороны, противоположные ускорениям ![]() и
и ![]() .
.
Экзаменационный билет № 8
1. Определение скоростей методом планов (на примере).
Представим себе плоское движение.
Модуль скорости
точки
можно
определить по формуле: ![]() ,
а линия действия этого вектора будет
перпендикулярная отрезку
,
а линия действия этого вектора будет
перпендикулярная отрезку ![]() .
.
Модуль скорости
точки
можно
определить по формуле: ![]() ,
а линия действия этого вектора будет
перпендикулярная отрезку
,
а линия действия этого вектора будет
перпендикулярная отрезку ![]() .
.
Модуль скорости
точки
можно
определить по формуле: ![]() ,
а линия действия этого вектора будет
перпендикулярная отрезку
,
а линия действия этого вектора будет
перпендикулярная отрезку ![]() .
.
![]() -
мгновенный центр вращения.
-
мгновенный центр вращения.
Видно, что модули
скоростей точек
,
и
пропорциональны
длинам отрезков
,
и
,
то есть: ![]() .
.
Многоугольник ![]() подобен
многоугольнику
подобен
многоугольнику ![]() ,
так как он образован взаимно
перпендикулярными и пропорциональными
прямыми. Поэтому рис.3.2 представляет
собой план скоростей треугольника
,
так как он образован взаимно
перпендикулярными и пропорциональными
прямыми. Поэтому рис.3.2 представляет
собой план скоростей треугольника ![]() ,
то есть треугольник
,
то есть треугольник ![]() является
планом скоростей треугольника
.
является
планом скоростей треугольника
.
План скоростей жёсткого звена – геометрическое место точек концов векторов абсолютных скоростей любых точек звена, если они построены из одной общей точки , называемой полюсом плана скоростей.
План скоростей
всегда строится в масштабе. В дисциплине
«Теория машин и механизмов» масштаб
имеет размерность, поэтому его принято
называть масштабным коэффициентом: ![]() ,
, ![]() .
.
План скоростей подобен самому звену, и повёрнут на девяносто градусов в сторону мгновенного вращения.
Если план скоростей жёсткого звена подобен своему звену, то план скоростей механизма не подобен самому механизму, так как в отличие от жёсткого звена механизм есть изменяемая подвижная система.
План скоростей механизма – совокупность планов скоростей отдельных звеньев, построенных из одной общей точки , называемой полюсом плана скоростей.
Пример:
Д ано: , и (рис.3.3).
Требуется определить: .
Зададимся неким масштабным коэффициентом .
Решение:
Д ля
построения плана скоростей механизма
существуют различные методы, наиболее
распространённым из которых является
метод векторных уравнений, разработанный
советскими учёными.
ля
построения плана скоростей механизма
существуют различные методы, наиболее
распространённым из которых является
метод векторных уравнений, разработанный
советскими учёными.
Модуль скорости точки можно определить по следующей формуле: . Линия действия вектора скорости точки перпендикулярна звену , а сам вектор направлен в сторону вращения звена .
Допустим, что точка не закреплена, и представим себе, что все точки звена совершают переносное движение со скоростью , то есть . С одной стороны , с другой стороны .
Вернём точку на действительную траекторию , для чего придадим точке скорость относительного вращательного движения около точки со скоростью относительного движения .
На плане скоростей
векторы, исходящие из полюса
скоростей
являются
векторами абсолютных скоростей
соответствующих точек, а векторы,
которые не проходят через полюс плана
ускорений, являются относительных
скоростей соответствующих точек.
Отрезок ![]() является
планом скоростей звена
,
а отрезок
является
планом скоростей звена
,
а отрезок ![]() является
планом скоростей звена
.
является
планом скоростей звена
.