

2. Понятие неуравновешенности роторов, Дисбаланс. Виды балансировки.
Ротор - тело, которое при вращении удерживается своими несущими поверхностями в опорах.
Неуравновешенность - состояние ротора, характеризующееся таким распределением масс, которое во время вращения вызывает переменные нагрузки на опорах ротора и его изгиб. Различают статическую, моментную, динамическую и квазистатическуюнеуравновешенность.
Р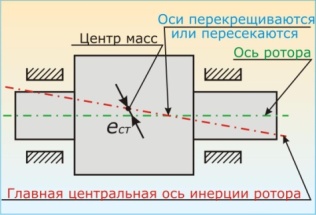 ис.1.1.
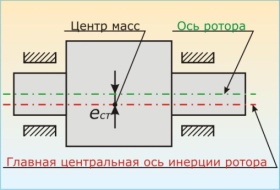
Статическая неуравновешенность ротора
ис.1.1.
Статическая неуравновешенность ротора
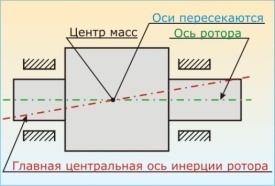
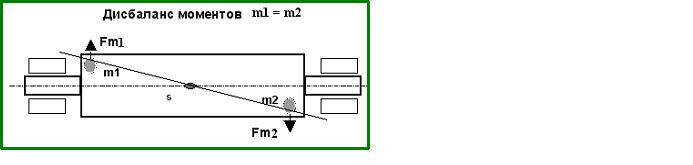
Рис.1.2. Моментная неуравновешенность ротора
Д исбаланс –
это векторная величина, мера статической
неуравновешенности ротора, которая
равна произведению неуравновешенной
массы m на ее эксцентриситет e,
где эксцентриситет e – радиус-вектор
центра этой массы относительно оси
ротора.
исбаланс –
это векторная величина, мера статической
неуравновешенности ротора, которая
равна произведению неуравновешенной
массы m на ее эксцентриситет e,
где эксцентриситет e – радиус-вектор
центра этой массы относительно оси
ротора.
 Статическая
неуравновешенность или статический
дисбаланс вызывает параллельное
смещение центральной оси инерции по
отношению к оси вращения ротора, это
же расстояние равно смещению центра
тяжести ротора.
Статическая
неуравновешенность или статический
дисбаланс вызывает параллельное
смещение центральной оси инерции по
отношению к оси вращения ротора, это
же расстояние равно смещению центра
тяжести ротора.
Статический дисбаланс определяется и устраняется очень простым методом: сначала ротор вынимается из агрегата и опирается горизонтально на параллельные призмы, потом методом переката легко выявляется и устраняется тяжелое место на роторе.
М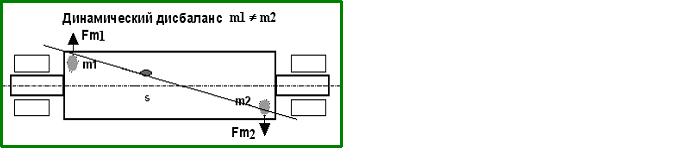 оментная
неуравновешенность или дисбаланс
моментов вызывает пересечение
геометрической оси ротора в центре
тяжести ротора, а главная ось инерции
находится под углом к геометрической
оси ротора.
оментная
неуравновешенность или дисбаланс
моментов вызывает пересечение
геометрической оси ротора в центре
тяжести ротора, а главная ось инерции
находится под углом к геометрической
оси ротора.
Статическая и моментная неуравновешенности отдельно друг от друга существуют в основном в теории (идеальные случаи). В жизни на практике они присутствуют вместе, т.е. главная ось инерции всегда имеет отклонения от центра тяжести и не бывает идеальных статически уравновешенных роторов – это и есть динамическая неуравновешенность или динамический дисбаланс.
Итак, мы можем сделать вывод, что лучшей балансировкой ротора является балансировка, проведенная сначала в «статике» (на параллельных призмах), а затем в «динамике», т.е. динамическая балансировка в собственных опорах. Для динамической балансировки применяют приборы и станки (дорезонансные, резонансные и зарезонансные).
Экзаменационный билет № 16
1. Трение в поступательной и вращательной парах.
При перемещении одного тела (звена механизма) относительно находящегося с ним в контакте другого тела (звена) в месте их контакта возникает сила, сопротивляющаяся перемещению, – сила трения F (рис. 4.16).
В еличину коэффициента трения в поступательной кинематической паре можно определить с помощью так называемого закона Кулона, в соответствии с которым величина силы трения F прямо пропорциональна нормальной силе N между соприкасающимися звеньями. Векторная сумма сил и равна полной силе реакций в кинематической паре: (рис. 4.16).
Рис. 4.16. Схема сил в поступательной кинематической паре
Отношение называют коэффициентом трения скольжения в поступательной кинематической паре, а угол – углом трения скольжения.
Полная реакция отклоняется на угол трения в сторону, противоположную скорости (см. рис. 4.16).
Величину коэффициента трения скольжения f можно определить экспериментально или по справочникам (величина f зависит от шероховатости, материалов, трущихся поверхностей, наличия смазки, ее качества, температуры и т.д.).
Т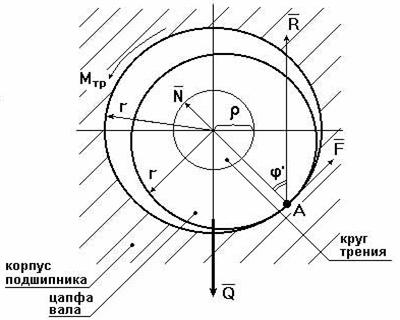 рение
во вращательной кинематической паре
рение
во вращательной кинематической паре
Внешние нагрузки, действующие на вал при его вращении, показаны на схеме рис. 4.17.
Рис. 4.17. Схема сил во вращательной кинематической паре
Здесь А –
точка приложения нормальной реакции ![]() ,
причем
–
равнодействующая всех нормальных сил
(эпюра этих сил может иметь различный
вид), (рис. 4.18);
,
причем
–
равнодействующая всех нормальных сил
(эпюра этих сил может иметь различный
вид), (рис. 4.18); ![]() –
сила трения (равно-действующая всех
сил трения, распределенных по поверхности
контакта);
–
сила трения (равно-действующая всех
сил трения, распределенных по поверхности
контакта);![]() –
сила давления цапфы вала на опору
(корпус подшипника);
–
сила давления цапфы вала на опору
(корпус подшипника); ![]() –
сила реакции во вращательной кинематической
паре,
–
сила реакции во вращательной кинематической
паре, ![]() ;
; ![]() ;
; ![]() –
угол трения; r – радиус цапфы
(опорной части) вала;
–
угол трения; r – радиус цапфы
(опорной части) вала; ![]() –
радиус круга трения;
–
радиус круга трения; ![]() –
приведенный коэффициент трения.
–
приведенный коэффициент трения.
Во вращательной
кинематической паре (см. рис. 4.15)
реакция
отстоит
от оси вращения на величину радиуса
круга трения ![]() ,
причем
всегда касательна к
кругу трения.
,
причем
всегда касательна к
кругу трения.
Момент трения ![]() .
.