

10. Синтез цс. Требования к желаемой передаточной функции замкнутой системы. Бажана передатна функція має вид:
 , (1)
, (1)
де Ф(z) – передатна функція замкнутої системи;
Wp(z) – передатна функція розімкнутої системи;
WПБЧ(z) – передатна функція приведеної безперервної частини;
D(z) – передатна функція дискретного перетворювача (цифрового регулятора);
Ф(z)+Ф(z)D(z)WПБЧ(z)=D(z)WПБЧ(z)
Ф(z)= D(z)[WПБЧ(z)- Ф(z)WПБЧ(z)]
 , (2)
, (2)
Вираз (2) відображає передатну функцію цифрового регулятора, що дозволяє синтезувати цифрову систему з бажаними характеристиками.
Передатна функція Ф(z) повинна формуватися у відповідності з наступними умовами:
Бути фізично реалізованою.
Нехай
 ,
тоді умова фізичної реалізації:
,
тоді умова фізичної реалізації:
 ,
тобто ступінь полінома знаменника
повинна бути більше ступеня полінома
чисельника.
,
тобто ступінь полінома знаменника
повинна бути більше ступеня полінома
чисельника.
Задовольняти умові стійкості.
Корені
характеристичного рівняння повинні
лежати в колі одиничного радіуса. Якщо
в системі присутнє запізнювання, то
передатну функцію необхідно помножити
на z-m,
де
 .
.
Задовольняти умові грубості.
Вимагають, щоб Ф(z) містила нулі передатної функції WПБЧ(z):
 ,
що лежать поза колом одиничного радіуса,
,
що лежать поза колом одиничного радіуса,
(1-Ф(z)) містила полюси передатної функції WПБЧ(z):
 і
Wp(z)
містила нулі і полюси.
і
Wp(z)
містила нулі і полюси.
11. Реализация цифровых регуляторов на эвм (метод параллельного программирования).
Найбільш універсальним способом корекції цифрових систем є застосування цифрових регуляторів. Функцію цифрового регулятора можуть виконувати імпульсні фільтри або контролери на мікропроцесорах, або програми ЕОМ.
Передатна функція цифрового регулятора може бути реалізована у вигляді програми ЕОМ. Відомі три основні методи програмування:
безпосереднє;
послідовне;
паралельне.
Паралельне програмування
При паралельному програмуванні передатна функція виражається у вигляді суми елементарних дробів, що відповідають простішим передатним функціям.
 (6)
(6)
Кожна найпростіша функція може бути реалізована методом безпосереднього програмування.
Структурна схема моделі буде мати вигляд:

Приклад:
Дано передатну функцію цифрового регулятора. Вивести математичний вираз для різних методів програмування.

Розклад на прості дроби:
 B=-0.3616-A;
B=-0.3616-A;
0.8264A+A+0.3616=0.44928
A = 0.048 B= -0.4096


12. Передаточные функции элементов цс - аналого-цифровой преобразователь.
X(t) → ∑ → АЦП → ЦВУ → ЦАП → НЧ → y(x) (и обр. связь к сумматору)
АЦП выполняет 3 операции:
- квантование по времени
- квантование по уровню
- кодирование
Квантование по времени выполн. идеальным импульсным элементом. Так как операцию квантования по уровню нужно выполнить по решетчатой функции, она поступает на релейный элемент.
Д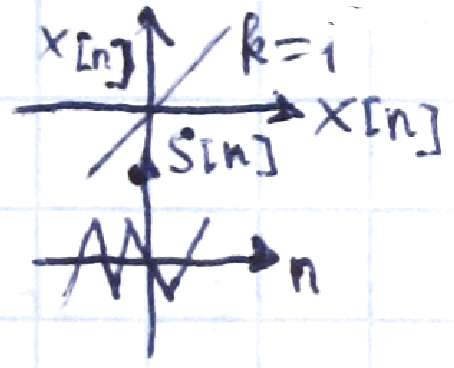
 ля
упрощения анализа цифровой системы
элемент с многоступенчатой релейной
характеристикой заменяют паралел.
соединением линейного сигнала с коэф.
К=1 и характеристики типа «пила».
ля
упрощения анализа цифровой системы
элемент с многоступенчатой релейной
характеристикой заменяют паралел.
соединением линейного сигнала с коэф.
К=1 и характеристики типа «пила».

Так как при кодировании не происходит преобразование информации, перед. ф-ция его =1.