

Беляев Ю.Н. Введение в векторный анализ
.pdfŸ 1. |
Производная вектор-функции |
|
81 |
||||
м.т. в конечное и называемый перемещением. |
|
||||||
|
Производная от радиус-вектора ~r(t) по времени |
|
|||||
|
|
lim |
~r |
d~r |
_ |
|
(2.2) |
|
t!0 |
t = dt |
~r = ~v |
|
|||
есть скорость материальной точки. Как видно из определения |
|||||||
(2.2), скорость ~v(t) это вектор, характеризующий быстроту |
|||||||
изменения радиус-вектора ~r(t) (и, следовательно, положения |
|||||||
м.т. в пространстве) и направленный по касательной к траек- |
|||||||
тории. |
|
|
|
|
|
|
|
|
В формуле (2.2) производная от ~r по времени отмечена точ- |
||||||
кой над функцией, а именно |
|
|
|
|
|||
|
|
|
d~r |
_ |
|
|
|
|
|
|
dt |
~r; |
|
|
|
такой способ обозначения производной по времени, часто ис- |
|||||||
пользуемый в механике, будет применяться и в данной работе, |
|||||||
точно так же, как две точки над функцией будут отмечать вто- |
|||||||
рую производную по времени. |
|
|
|
||||
|
|
Z |
|
|
|
~v(t) |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
~r |
|
|
|
~r(t) |
|
~a(t) |
|
|
||
|
|
|
|
|
|
||
|
|
|
|
~r(t + t) |
|
||
|
~ez |
|
|
|
|
|
|
|
O |
~ey |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
~ex |
|
|
|
|
Y |
|
|
x |
|
|
|
|
|
|
|
X |
|
Ðèñ. 52 |
|
|
|
|
|
|
|
|
|
|
||
|
Быстрота изменения скорости задается ускорением ~a(t) |
||||||
вектором, равным производной от скорости ~v(t) м.т. по времени |
|||||||
или второй производной по времени от радиус-вектора ~r(t): |
|||||||
|
|
|
|
d~v |
_ |
• |
(2.3) |
|
|
~a(t) = |
dt = ~v = ~r: |
||||

82Глава 2. ВЕКТОР-ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА
1.2.Основные свойства производных. Из определения (2.1) следует, что основные правила дифференцирования функций остаются в силе и для вектор-функций. Приведем некоторые из этих правил.
Очевидно, что производная постоянного вектора равна ну-
ëþ.
П р о и з в о д н а я с у м м ы в е к т о р о в равна сумме производных
h i
~ ~
d f1( ) + f2( )
d
П р о и з в о д н '( ) и векторной
~
d('f )
d
|
|
|
|
|
~ |
|
|
|
~ |
|
|
|
~ |
|
|
|
~ |
|
||
= |
lim |
f1 + f1 |
= |
lim |
f1 |
|
+ lim |
f1 |
= |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
!0 |
|
|
|
|
!0 |
|
!0 |
|
||||||||||||
|
~ |
|
|
~ |
|
( ) |
|
|
|
|
|
|
|
|
|
|
||||
= |
df1( ) |
|
+ |
df2 |
: |
|
|
|
|
|
|
(2.4) |
||||||||
|
d |
|
|
d |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
à ÿ ï ð î è ç â å ä å í è ÿ |
~ |
~ |
скалярной ' = |
|||||||||||||||||
F = 'f |
||||||||||||||||||||
~ |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
f = f ( ) функций вычисляется по формуле |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
~ |
~ |
~ |
|
|
||||
= |
|
lim |
(' + ')(f + f ) 'f |
= |
|
|
||||||||||||||
|
!0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
~ |
|
|
|
~ |
|
~ |
|
|
|
|
|
||||
= lim |
'f + ' f + ' f |
= |
|
|
||||||||||||||||
|
|
|
|
|
||||||||||||||||
|
!0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
d' ~ |
~ |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
df |
|
|
|
|
|
|
|
|
|
(2.5) |
|||||
= |
|
f + ' |
|
|
: |
|
|
|
|
|
|
|
|
|||||||
d |
d |
|
|
|
|
|
|
|
|
|||||||||||
В частности, из формулы (2.5) следует, что постоянный множитель можно выносить из-под знака производной:
~ |
~ |
|
a = const; |
|
d('~a) |
|
d' |
|
const: |
|
d(af ) |
|
df |
|
|
|
|
||||
|
= a |
|
; |
|
è |
|
= |
|
~a; |
~a = ! (2.6) |
d |
d |
|
d |
d |
||||||
П р и м е р 37. Закон движения центра масс.
Положение центра масс системы n м.т., массы которых mj и радиус-векторы ~rj (j = 1; : : : ; n), согласно формуле (1.26), определяется радиус-вектором
~rc = Pj |
mc |
; |
|
|
n |
|
|
|
|
=1 mj~rj |
|
Ÿ 1. Производная вектор-функции |
83 |
|||||||
P |
n |
|
c |
|
|
|
||
ãäå mc = |
j=1 mj масса системы. |
|
||||||
Дважды дифференцируя ~r по времени и используя правила |
||||||||
(2.4-2.6), получаем |
|
|
|
|
|
|
|
|
|
• |
n |
|
d(mj~vj ) |
|
|||
|
|
|
X |
|
|
|
|
|
|
mc~rc = |
|
|
|
|
: |
||
|
|
|
j=1 |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
Второй закон Ньютона гласит, что |
|
|||||||
|
|
d(mj~vj ) |
|
~ |
|
(2.7) |
||
|
|
|
dt |
|
|
= Fj ; |
||
|
|
|
|
|
|
|
|
|
~
ãäå Fj равнодействующая всех сил, приложенных к j-й материальной точке. Следовательно,
|
n |
|
• |
X |
~ ~ |
mc~rc = |
j=1 |
Fj = F |
|
|
центр масс системы движется как точка, в которой сосредоточена вся масса системы и к которой приложен главный вектор внешних сил, действующих на систему.
Если система изолированная, т.е. главный вектор внешних сил равен нулю, центр масс согласно полученной формуле не изменяет своего движения, другими словами находится в покое или движется прямолинейно и равномерно.
Ф о р м у л а д л я п р о и з в о д н о й с к а л я р н о г о п р о и з- в е д е н и я. Используя свойства скалярного произведения представим приращение скалярного произведения вектор-функций
~ |
~ |
â âèäå |
|
|
|
|
|
|
|
|
|
|
f1 |
è f2 |
|
|
|
|
|
|
|
|
|
||
|
|
~ |
~ ~ |
|
|
|
~ |
|
|
~ |
~ |
( ) = |
|
(f1 |
f2) = f1( + ) f2( + ) f1( ) f2 |
||||||||||
|
|
|
~ |
|
|
~ |
~ |
|
~ |
~ ~ |
= |
|
|
|
|
= (f1 |
+ f1) (f2 |
+ f2) f1f1 |
|
||||||
|
|
|
~ |
|
~ |
~ |
|
~ |
~ |
~ |
|
|
|
|
|
= f1 |
f2 |
+ f1 |
f2 |
+ f1 |
f2; |
|
|||
где последнее слагаемое второго порядка малости по сравнению с первыми двумя.
~ ~
Разделим найденное выражение для (f1 f2) на приращение аргумента и возьмем предел от разностного отношения

84 Глава 2. ВЕКТОР-ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА
при ! 0. В результате получим |
|
|
|
|
|
||||||
~ |
~ |
~ |
|
|
|
|
~ |
|
|
||
|
d(f1 |
f2) |
= |
df1 |
|
f~ |
+ f~ |
|
df2 |
: |
(2.8) |
|
d |
d |
d |
||||||||
|
|
2 |
1 |
|
|
||||||
Отметим три важных следствия формулы (2.8).
Если вектор ~ изменяется в зависимо-
Ñ ë å ä ñ ò â è å 1. f ( )
сти от только по направлению (то есть модуль вектора есть величина постоянная f = const), то
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
df |
|
|
~ |
|
|
|
|
|
(2.9) |
|
|
|
|
|
|
d |
? f: |
|
|
|
|
||||
~ |
~ |
~ |
|
|
|
|
|
|
~ ~ |
|
|
2 |
= const: Тогда |
||
Возьмем f1 |
= f2 |
= f |
и учтем, что f f = f |
|
|||||||||||
из формулы (2.8) получаем |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
~ |
|
|
|
|
~ |
|
~ |
|
|
|
|||
|
|
|
df |
|
~ ~ |
|
df |
|
~ |
df |
|
|
|
||
|
0 = |
d |
|
f + f |
d |
= 2f |
d |
: |
|
|
|||||
Скалярное произведение двух ненулевых векторов равно нулю, если они взаимно ортогональны. Таким образом, последнее равенство доказывает соотношение (2.9).
С л е д с т в и е 2. Для производной модуля вектор-функции
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f ( ) по скалярному аргументу справедлива формула |
||||||||||||||||||||
|
|
|
d f |
|
1 ~ |
|
~ |
|
|
|
|
|||||||||
|
|
|
|
|
|
df |
|
|
|
|
(2.10) |
|||||||||
|
|
|
|
|
|
|
|
|
= |
|
f |
|
|
: |
|
|
|
|||
|
|
|
|
d |
f |
|
d |
|
|
|
||||||||||
Для доказательства формулы (2.10) достаточно продиффе- |
||||||||||||||||||||
ренцировать тождество f~ 2 |
= f~ f~. |
|
|
|
~ |
удовлетворяет |
||||||||||||||
Ñ ë å ä ñ ò â è å 3. Åñëè |
переменный вектор |
f |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
равенству |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|||
|
|
|
|
~ |
|
|
|
df |
|
~ |
|
|
|
|
( ) |
|||||
|
|
|
|
f d = 0; |
|
|
|
|
||||||||||||
то его направление не зависит от параметра . |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
Обозначим ~ef единичный вектор в направлении f . Диффе- |
||||||||||||||||||||
ренцируя ~ef , получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
~ |
! |
0 |
|
|
|
|
~ 0 |
0 |
~ |
|
|
|||||
|
d~ef |
|
|
|
|
|
|
|
|
|||||||||||
|
|
f |
|
|
|
|
|
f f |
f f |
|
|
|
||||||||
|
d |
= |
|
f |
= |
|
|
|
f 2 |
|
: |
|
( ) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||

Ÿ 1. Производная вектор-функции |
85 |
Здесь для производных использована сокращенная форма за-
ïèñè: |
~ |
|
|
|
|
|
~ 0 |
|
0 |
df |
|
||
|
df |
|
|
|||
f |
|
|
; |
f |
|
: |
d |
d |
|||||
Такие обозначения будем использовать и в дальнейшем. Преобразуем формулу ( ), используя равенство (2.10)
|
d~ef |
|
f |
2 ~ 0 |
~ ~ 0 |
~ |
~ ~ 0 |
~ |
|
|||||||
|
= |
f |
(f f |
)f |
= |
(f f |
) f |
: |
||||||||
|
|
|
|
|
f 3 |
|
|
|
|
|
||||||
|
d |
|
|
|
|
|
f 3 |
|
|
|
||||||
Правая часть этой формулы, согласно предположению ( ), |
||||||||||||||||
|
|
|
|
|
|
const. Следовательно, направление |
||||||||||
равна нулю, и, значит, ~ef = ! |
|
|
|
|
|
|
|
|||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вектора f неизменно. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ô î ð ì ó ë à ä ë ÿ ï ð î è ç â î ä í î é â å ê ò î ð í î ã î ï ð î è ç- |
||||||||||||||||
â å ä å í è ÿ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
~ |
~ |
~ |
|
|
|
|
|
|
~ |
|
|
|||||
|
|
d(f1 |
f2) |
= |
df1 |
|
|
f~ + f~ |
|
df2 |
|
(2.11) |
||||
|
|
|
|
d |
|
d |
||||||||||
|
|
|
d |
|
|
2 |
1 |
|
||||||||
доказывается точно та же, как и (2.8).
П р и м е р 38. Теорема об изменении момента импульса м.т. По определению, момент импульса материальной точки есть
векторное произведение е¼ радиус-вектора на импульс м.т.
|
|
|
~ |
|
|
|
|
|
|
KO = ~r (m~v): |
|
|
|
|
|
|
~ |
по времени, используя правило (2.11). |
||
Продифференцируем K |
||||||
~ |
|
d~r |
|
d(m~v) |
|
|
|
dKO |
= |
(m~v) + ~r |
: |
||
|
dt |
dt |
dt |
|||
_
По определению (2.2), ~r = ~v, поэтому первое слагаемое в правой части последней формулы равно нулю. Второе слагаемое преобразуем, используя второй закон Ньютона
|
d(m~v) |
~ |
~ |
|
(2.12) |
~r |
dt |
= ~r F |
= MO |
|
это момент сил, действующих на м.т., относительно центра O, из которого проводится радиус-вектор ~r.
86 Глава 2. ВЕКТОР-ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА
В результате получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
~ |
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dKO |
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.13) |
|
|
|
|
|
|
|
= MO |
: |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ï ð î è ç â î ä í à ÿ ñ ì å ø à í í î ã î ï ð î è ç â å ä å í è ÿ |
||||||||||||||||||||
|
|
d hf~1 (f~2 f~3 )i |
= f~1 0 |
|
(f~2 |
|
f~3) + f~1 |
|
(f~2 0 |
|
f~3) + |
|||||||||
|
|
d |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
~ |
|
~ |
|
|
~ 0 |
): |
|
|
|
|
|
|
(2.14) |
|||
|
|
|
|
|
+f1 |
|
(f2 |
f3 |
|
|
|
|
|
|
||||||
Ï ð î è ç â î ä í à ÿ ä â î é í î ã î â å ê ò î ð í î ã î ï ð î è ç â å ä å- |
||||||||||||||||||||
í è ÿ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
d hf~1 (f~2 f~3 )i |
|
= f~1 0 |
|
(f~2 |
|
f~3) + f~1 |
|
(f~2 |
0 |
|
f~3) + |
||||||||
|
|
|
||||||||||||||||||
|
|
d |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
~ |
|
~ |
|
|
~ |
0 |
|
|
|
|
|
|
(2.15) |
|||
|
|
|
|
|
+f1 |
(f2 |
|
f3 |
): |
|
|
|
|
|
|
|||||
Для доказательства равенства (2.14) и (2.15) нужно последовательно применить правила (2.8) и (2.11).
Ï ð î è ç â î ä í à ÿ ñ ë î æ í î é â å ê ò î ð-ô ó í ê ö è è |
|
||||||
~ |
|
~ |
|
|
|
||
|
df ( ( )) |
= |
df d |
: |
(2.16) |
||
|
|
|
|
|
|||
|
d |
d d |
|||||
|
|
|
|
||||
Ф о р м у л а Т е й л о р а, дающая разложение вектор-функ- ции в ряд по возрастающим степеням приращения аргумента, имеет такой же вид, что и для скалярной функции:
~ |
~ |
~ 0 |
|
1 |
~ 00 |
|
|
2 |
|
|
|
f ( ) = f ( 0)+f |
( 0)( 0) + |
2! |
|
f |
( 0)( 0) |
|
+ : : : + |
||||
|
|
|
|
1 |
~ (n) |
|
|
n |
+: : : (2.17) |
||
|
|
|
+ |
n! |
f |
|
( 0)( 0) |
||||
~
Обозначим разность между f ( ) и суммой n + 1 первых членов ряда (2.17) через ~"n( ). Для того чтобы при некотором значе- нии имело место разложение (2.17), необходимо и достаточно, чтобы
lim ~"n( ) = 0:
!0

Ÿ 1. Производная вектор-функции |
87 |
Доказательство формулы (2.17) выполняется точно так же, как и ее скалярного аналога.
Ê î î ð ä è í à ò í î å ï ð å ä ñ ò à â ë å í è å ï ð î è ç â î ä í î é. Åñ-
~ ~ ~
ли базисные векторы b1, b2, b3 не зависят от скалярного параметра , то вычисление производной вектор-функции по скалярному аргументу сводится к вычислению производных ее
координат: |
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
df1~ |
|
df2~ |
|
df3~ |
|
|
|||||
|
df |
|
|
|
|
(2.18) |
|||||||
|
|
|
= |
|
b1 |
+ |
|
b2 |
+ |
|
b3 |
: |
|
|
d |
d |
d |
d |
|||||||||
Действительно, приращение вектора |
~ |
|
|
|
|||||||||
f åñòü |
|
||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
~ ~ |
|
|
~ |
|
X |
|
|
|
~ |
|
|||
f = f ( + ) f ( ) = |
|
[fi( + ) fi( )] bi; |
|
||||||||||
i=1
и отношение приращения векторной функции к приращению скалярного аргумента можно записать в виде
~ |
|
3 |
|
|
|
f |
|
= |
X |
fi( + ) fi( ) |
~bi: |
|
|
||||
|
i=1 |
|
|||
|
|
|
|
|
|
Если функции f1( ), f2( ), f3( ) имеют производные при выбранном значении , то множители при базисных векторах в пределе при ! 0 обратятся в производные dfd 1 , dfd 2 ; dfd 3 и из последнего равенства получим формулу (2.18).
П р и м е р 39. Скорость и ускорение м.т. в декартовой системе координат.
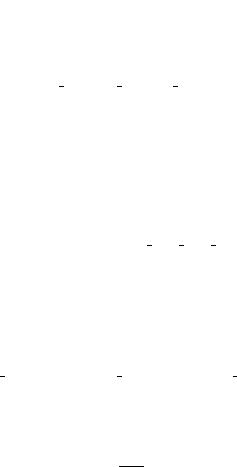
Радиус-вектор ~r, скорость ~v и ускорение ~a, как и любой другой вектор, могут быть разложены на составляющие. Например, если с началом системы отсчета т. O связана прямоугольная система координат OXY Z (рис. 52), то радиус-вектор ~r можно записать в виде
~r = x~ex + y~ey + z~ez ; |
(2.19) |
ãäå ~ex; ~ey ; ~ez единичные базисные векторы декартовой системы координат OXY Z, а x; y; z проекции радиус-вектора ~r на координатные оси.
88 Глава 2. ВЕКТОР-ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА
Аналогично, обозначив через vx, vy , vz è ax; ay ; az проекции скорости и ускорения на координатные оси X; Y; и Z, имеем
~v = vx~ex + vy~ey + vz~ez ; |
(2.20) |
~a = ax~ex + ay~ey + az~ez : |
(2.21) |
Дифференцируя левую и правую части формулы (2.19) по времени и считая ориентации координатных осей неизменными, с учетом определения (2.2) получаем
~v = x~ex + y~ey + z~ez : |
(2.22) |
Сравнивая формулы (2.20) и (2.22), находим выражения для проекций скорости на оси прямоугольной декартовой системы координат
vx = x; vy = y; vz = z: |
(2.23) |
Точно так же для проекций ускорения можно получить
ax = v_x = x;• ay = v_y = y;• az = v_z = z:• |
(2.24) |
|||||||||
Модули ("длины") векторов ~r, ~v и ~a равны |
|
|||||||||
r = q |
|
; |
|
|
|
|
|
|
|
|
x2 + y2 + z2 |
= q |
(2.25) |
||||||||
v = q |
|
|
|
|
; |
|
||||
vx2 + vy 2 + vz 2 |
x2 + y2 + z2 |
(2.26) |
||||||||
a = q |
|
= q |
|
: |
|
|||||
ax2 + ay 2 + az 2 |
x•2 + y•2 + z•2 |
(2.27) |
||||||||
Направления векторов скорости ~v и ускорения ~a в декартовой системе координат определяются направляющими косинусами:
cos(~v; ~ex) = x=v; |
cos(~v; ~ey ) = y=v; |
cos(~v; ~ez ) = z=v; |
(2.28) |
|||
d |
) = x=a;• |
d |
) = y=a;• |
d |
) = z=a:• |
(2.29) |
cos(~a; ~e |
~a; ~e |
cos(~a; ~e |
||||
dx |
|
cos( dy |
|
dz |
|
|
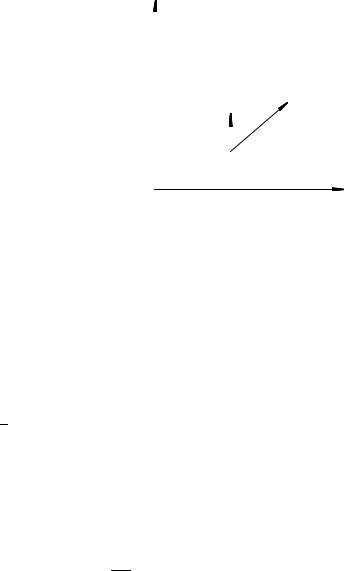
П р и м е р 40. Движение м.т. задано радиус-вектором
~r = At~ex + Bt2 2 ~ey ;
Ÿ 2. Интеграл от вектора |
89 |
где t измеряется в секундах, постоянная A в м/с, и постоянная B в м/с2: Определить уравнение траектории, величину и направление скорости и ускорения м.т. в момент времени t = 1 с:
Решение. Согласно условию задачи,
|
|
|
|
|
|
|
|
Bt2 |
|
|
|
Y; ì |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x = At; |
y = |
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Исключив |
èç |
|
последних |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
выражений время, находим |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
уравнение траектории: |
|
|
|
|
|
|
|
|
|
|
~v |
|||||||||||||
|
B |
|
x |
2 |
|
|
|
|
1 |
|
|
|
|
|
|
~a |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
y = |
|
|
|
|
|
|
|
|
|
|
|
|
|
)45 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
A2 |
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
м.т. движется |
ïî |
|
параболе. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
На рис. 53 отмечены положе- |
O |
|
|
|
1 |
|
|
|
|
2 X; ì |
||||||||||||||
ния точки с временным ин- |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
Ðèñ. 53 |
|
|
|
|
|
|||||||||||||
тервалом 0.2 с (при условии, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
÷òî A = 1ì/ñ, è B = 1 ì/c2). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
По формулам (2.22) и (2.26) находим скорость материальной |
||||||||||||||||||||||||
точки |
|
|
|
|
|
|
|
|
|
|
|
v = p |
|
|
|
|
|
|
|
|
|
|||
|
|
~v = A~ex + Bt~ey ; |
|
|
A2 + B2t2 |
; |
|
|
|
|||||||||||||||
а по формулам (2.24) и (2.27) ускорение
~a = B~ey ; a = jay j = jBj:
При условии A = 1м/с и B = 1 м/c2 имеем следую-
щие значения искомых величин для момента времени t = 1с: p
v(1) = 2(ì/ñ); a(1) = 1(ì/ñ2); направления векторов ~v и ~a в момент времени t = 1 с показаны на рис. 53. Ускорение остается неизменным для любого момента времени t.
Ÿ 2. Интеграл от вектора
Åñëè
~
dF ~ d = f;
90 |
Глава 2. ВЕКТОР-ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА |
||||
òî |
~ |
|
|
~ |
и обознача- |
F |
называется неопредел¼нным интегралом от f |
||||
åòñÿ |
F = Z |
f ( ) d + ! |
|
||
|
|
(2.30) |
|||
|
|
~ |
~ |
const: |
|
|
|
|
|
|
|
|
Определ¼нный интеграл |
|
|
||
|
|
Z f~ d = F~ ( ) F~ ( 0); |
(2.31) |
||
|
|
0 |
|
|
|
~
равный разности значений вектора F для границ интегрирования, есть предел суммы векторов
Xn
~
f ( i)( i+1 i);
i=0
ãäå i ряд значений аргумента , вставленных между 0 è= n+1, при n ! 1, когда все разности i+1 i стремятся к нулю:
Z
~
f d =
0
|
n |
|
|
|
lim |
X |
~ |
i): |
(2.32) |
n!1 |
|
f ( i)( i+1 |
|
i=0
Доказательство формулы (2.32) проводится точно так же,
как и для интегралов от скалярных функций. |
|
|||
|
~ |
~ |
~ |
|
В частности, если f = C'( ); где C постоянный вектор, |
||||
òî |
|
|
|
|
Z f~ d = Z C'~ |
( ) d = C~ Z '( ) d : |
(2.33) |
||
0 |
0 |
|
0 |
|
Если базисные векторы системы координат не зависят от параметра интегрирования , интегрирование вектор-функции сводится к вычислению интегралов от координат вектора. Так, в декартовой системе координат
Z |
f~ d = ~ex Z |
fx d + ~ey Z |
fy d + ~ez Z fz d : |
(2.34) |
0 |
0 |
0 |
0 |
|