

Беляев Ю.Н. Введение в векторный анализ
.pdfŸ 2. Примеры векторов |
21 |
которого, направленная по вектору ~eb ~ec; делит угол A пополам.
Составим векторное уравнение биссектрисы угла A, как прямой, проходящей через точку A(~rA ) параллельно вектору ~eb ~ec (см. формулу (1.10)). Получим
|
|
|
|
|
|
~ |
|
~c |
! : |
|
|||
|
|
|
|
|
|
|
b |
|
(1.18) |
||||
|
|
|
|
|
~r = ~rA + |
|
|
|
|
|
|||
|
|
B(~rB ) |
|
|
b |
c |
|||||||
|
c |
a |
Аналогично составляется уравнение |
||||||||||
|
биссектрисы угла B: |
|
|
|
|||||||||
-~ec |
|
|
C(~rC ) |
|
: |
(1.19) |
|||||||
|
|
||||||||||||
A(~rA ) b |
~r = ~rB + |
c |
a |
||||||||||
|
|
~eb |
|
|
~c |
~a |
|
|
|
||||
Ðèñ. 16
Точка пересечения этих биссектрис должна удовлетворять обоим уравнениям (1.18) и (1.19). Значит, должно выполняться
равенство |
|
b c ! |
= ~rB + c a : |
|||||||
~rA + |
|
|||||||||
|
~ |
|
|
|
~c ~a |
|||||
|
|
b ~c |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Исключая из этой формулы вектор ~a с помощью замены ~a =
~
b ~c, после элементарных преобразований получим:
a |
b ~b + |
a |
+ c |
+ c 1 |
~c = ~0: |
(1.20) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
~
Векторы b и ~c не коллинеарны друг другу, поэтому равен-
~
ство (1.20) возможно только, если множители при b и ~c тождественно равны нулю. Следовательно, должны выполняться следующие соотношения
= |
b |
; |
= |
bc |
: |
(1.21) |
|
a |
a + b + c |
||||||
|
|
|
|
|
Подставляя выражение (1.21) в формулу (1.18) (или (1.19)), получим значение радиус-вектора точки пересечения биссектрис углов A и B
~r = |
a~rA + b~rB + c~rC |
: |
(1.22) |
|
|||
|
a + b + c |
|
|

22 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
Непосредственной проверкой можно убедиться, что точка пересечения биссектрис углов B и C тоже определяется формулой (1.22). Таким образом, все три биссектрисы пересекаются в одной точке, радиус-вектор которой выражается формулой (1.22).
2.2. Перемещение, скорость и ускорение материальной точки. Одной из основных моделей материальных тел, движение которых исследует механика, является материальная точка тело, размерами которого в условиях данной задачи можно пренебречь и считать все его вещество сосредоточенным в одной геометрической точке. Напомним некоторые из основных положений механики материальной точки.
При движении материальной точки (м.т.) ее радиус-вектор ~r описывает в пространстве кривую, называемую траекторией движения. Пусть в начальный момент времени t0 материальная точка (м.т.) находилась в положении M0(~r0), определяемом радиус-вектором ~r0, а в момент времени t > t0 в положении M (~r). Вектор ~r, проведенный из начального положения м.т. M0 в конечное M , называется перемещением м.т. за времяt = t t07. По правилу сложения векторов (рис. 17) ~r = ~r ~r0, т.е. перемещение это изменение (или приращение) радиусвектора точки за время t.
Средней скоростью движения м.т. ~vcp называется отношение перемещения ~r к интервалу времени t
~vcp = |
~r |
; |
(1.23) |
t |
это вектор, направленный в ту же сторону, что и перемещение~r, величина которого в общем случае зависит от выбора момента времени t0 и величины интервала t.
Для фиксированного момента t0 при уменьшении интервала времени t будет уменьшаться и перемещение ~r. При этом отношение ~r= t стремится к некоторому вектору ~v0, который
7 прописная греческая буква "дельта", это не множитель, а символ, и t не произведение на t. Символ заменяет здесь слово "прираще-
ние"(другое значение этого обозначения да¼тся в примечании на стр.178); запись t читается как "дельта тэ"или "приращение времени".
Ÿ 2. |
Примеры векторов |
|
|
|
|
23 |
|||
называется скоростью м.т. в точке M0(~r0). Записывается это |
|||||||||
òàê: |
|
|
|
|
|
|
|
|
|
|
|
|
|
~v0 = |
lim |
~r |
; |
|
|
|
|
|
|
|
t!0 |
t |
|
|
|
где буквы lim (начальные буквы латинского слова limes "ли- |
|||||||||
мес", т.е. предел) обозначают предел; под ним записано, о каком |
|||||||||
пределе идет речь при t, стремящемся к нулю; стрелка вни- |
|||||||||
зу заменяет слово "стремится", а справа указана та величина |
|||||||||
~r= t, предел которой ищется8. |
|
|
|
|
|||||
|
Скорость ~v0 направлена по касательной к траектории в точ- |
||||||||
êå M0 (предельное направление секущей M0M при сближении |
|||||||||
точки M с M0) и характеризует быстроту изменения радиус- |
|||||||||
вектора ~r в момент t0. |
|
|
|
|
|
||||
M0 |
~v0 |
|
M0 |
~v |
~vt |
M |
|||
|
|
|
|
|
|||||
|
~vcp |
|
~r |
M |
~r0 |
|
~r |
|
|
|
~r0 |
|
|
|
|
|
|||
|
|
~r |
|
~v |
O |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
траектория |
|
|
|
|
||||
|
|
|
|
|
|
||||
|
OÐèñ. 17 |
|
|
|
|
Ðèñ. 18 |
|
|
|
|
Точно так же определяется скорость ~v для любого момента |
||||||||
времени t. |
|
|
|
|
|
|
|
|
|
|
Åñëè ~vcp не зависит ни от выбора момента времени t0, íè îò |
||||||||
величины интервала t, то имеет место р а в н о м е р н о е |
ï ð ÿ- |
||||||||
ì î ë è í å é í î å |
д в и ж е н и е материальной точки. В этом слу- |
||||||||
чае средняя скорость движения точно характеризует быстроту |
|||||||||
изменения положения м.т. в любой момент времени: ~vcp = ~v. Çà |
|||||||||
равные промежутки времени м.т. совершает равные перемеще- |
|||||||||
íèÿ. |
|
|
|
|
|
|
|
|
|
|
Нетрудно заметить, что уравнение прямой (рис. 18), по ко- |
||||||||
торой движется м.т., определяется в соответствии с (1.10) фор- |
|||||||||
мулой |
|
|
|
|
|
|
|
|
|
|
|
|
|
~r = ~r0 + ~vt: |
|
|
|
||
8Выражение, стоящее в правой части последнего равенства, читается |
|||||||||
так: "предел дельта вектор эр на дельта-тэ, стремящемся к нулю". |
|
||||||||
24 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
При неравномерном движении м.т. быстроту изменения скорости характеризуют ускорением ~a. Рассмотрим р а в н о у с к о- р е н н о е д в и ж е н и е. Это такое движение, при котором равные изменения скорости происходят за равные промежутки времени. Обозначим скорость м.т. в начальный момент времени t0 = 0 вектором ~v0, а ~v скорость в момент времени t, тогда ~a = (~v ~v0)=t: Из этой формулы, зная ускорение м.т., можно найти ее скорость в любой момент времени
~v = ~v0 + ~at: |
(1.24) |
При равноускоренном движении положение м.т. в пространстве описывается радиус-вектором
|
~at2 |
(1.25) |
~r = ~r0 + ~v0t + |
2 : |
Согласно условию компланарности векторов (1.3) и законам (1.24) и (1.25), скорость м.т. ~v и перемещение ~r ~r0 лежат в одной плоскости с постоянными векторами ~v0 и ~a. Следовательно, равноускоренное движение м.т. является плоским.
a) M0 |
~r01 M1 |
|
|
M3 |
|
|
|||
|
|
~v0 |
|
|
|
|
|
~v4 |
|
|
|
|
|
|
|
~v2 |
|
|
|
|
|
|
|
|
c) |
|
d) |
~v3 |
|
|
|
A1 |
|
|
|
A3 |
|||
|
|
~v1 |
|
|
|
|
M2 |
|
|
|
|
~vcp1 |
|
|
|
|
|
|
|
b) M0 |
|
|
M1 |
|
A1 |
A2 |
|
~v2 |
|
|
|
~at |
M0 |
|
~v1 |
|
~v1 ~at |
||
|
|
|
|
2 |
|
|
|||
|
|
~v0 |
|
|
M1 |
|
|
||
|
|
|
A0 |
|
~v0 |
A0 |
|
~v0 |
|
|
|
|
|
|
|
||||
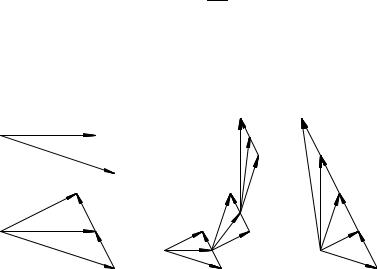
Рис. 19 П р и м е р 8. Материальная точка, начиная равноускорен-
ное движение в момент t = 0 из положения M0 c начальной скоростью ~v0, в момент времени t = 1 попадает в положение M1. Полагая масштабы построения единиц расстояний и скоростей на рис. 19a одинаковыми, найти графическим построением положения м.т. в моменты t = 2 и t = 3.

Ÿ 2. Примеры векторов |
|
|
|
|
|
25 |
|
Решение. По определению средней скорости (1.23) и соглас- |
|||||||
но равенству (1.25) |
|
|
|
|
|
|
|
~vcp = |
~r ~r0 |
= ~v0 |
+ |
~at |
: |
||
|
2 |
||||||
|
t |
|
|
|
|||
!
Вектор M0M1 это перемещение м.т. ~r01 за первый интервал
!
времени t = 1. С другой стороны по условию задачи M0M1 численно равен средней скорости движения за этот интервал времени ~vcp1 (см. рис. 19b). Следовательно, вектор, проведенный
из конца ~v0 в точку M1; есть ~at=2. Увеличивая его в два раза,
!
получаем вектор A0A1 = ~at.
Теперь, выполняя сложение согласно формуле (1.24) по правилу треугольника, находим скорость м.т. ~v1 в момент времени t = 1, как это представлено на рис. 19b.
Дальнейшее графическое решение задачи показано на рис.
19c, масштаб которого в два раза меньше, чем рис. 19a; b: Из
! !
точки M1 строим вектор M1A2 = M0A1 = ~v1, прибавляем к
! !
нему по правилу треугольника A2A3 = A0A1 = ~at. В результате
!
находим скорость ~v2 = M1A3: Середина отрезка A2A3 åñòü M2положение м.т. в момент времени t = 2.
Аналогичным образом (см. рис. 19c) находится положение м.т. M3 в момент времени t = 3 и могут быть найдены последующие (с единичным временным интервалом) положения м.т.
Для нахождения скоростей м.т. в моменты времени t = 1; 2; 3 : : : достаточно прибавить к ~v0 соответственно векторы ~at; 2~at; 3~at и т.д. (см. рис. 19d). Заметим, что если начала векторов скорости для любого момента времени привести к общему на- чалу, то концы этих векторов в соответствии с формулой (1.24) опишут прямую линию.
2.3. Понятие силы. Воздействие на материальную точ- ку (м.т.) со стороны других тел, в результате которого может происходить изменение движения м.т., называется механиче- ским. Мерой механического воздействия является сила.
~
Сила F это вектор, который на рисунках изображается в виде направленного отрезка, отложенного от материальной точки в направлении механического воздействия на нее со
26 Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ
стороны другого тела. Модуль силы пропорционален величине воздействия. Если на м.т. одновременно действуют несколько
~ |
~ |
~ |
|
ñèë F1 |
; F2 |
; : : : ; Fn; то такое воздействие эквивалентно одной си- |
|
~ |
~ |
~ |
~ |
ëå R = F1 |
+ F2 + + Fn; называемой равнодействующей. |
||
Одна из аксиом |
классической механики гласит: Две ма- |
||
териальные точки действуют друг на друга с силами, равными по модулю и направленными в противоположные стороны вдоль прямой, соединяющей эти точки.
Условием равновесия материальной точки является равенство нулю равнодействующей всех сил, действующих на материальную точку.
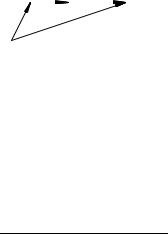
П р и м е р 9. Точка M (~r) притягивается неподвижными материальными точками, массы которых m1; m2; : : : ; mn, а положения определяются соответственно радиус-векторами ~r1; ~r2; : : : ; ~rn. Силы притяжения пропорциональны расстояниям до этих точек и их массам. Найти равнодействующую силу и положение равновесия точки M .
Решение. На рис.20 показана одна из точек системы mj è
порождаемая ей сила |
~ |
|
||||
Fj . |
|
|||||
|
|
|
|
|
Сила притяжения, действующая |
|
|
|
|
|
|
на точку M со стороны массы mj , |
|
|
|
|
~rj ~r |
|
направлена по вектору ~rj ~r, ïðî- |
|
M |
|
mj |
порциональна длине j~rj ~rj этого |
|||
~r |
|
~ |
|
вектора и массе mj . Следовательно, |
||
Fj |
~rj |
|
эта сила представляется |
формулой |
||
|
|
|
|
|||
|
|
|
|
|
||
O |
|
|
|
~ |
коэффи- |
|
Ðèñ. 20 |
|
Fj = kmj (~rj ~r); ãäå k |
||||
|
|
|
циент пропорциональности. |
|||
Результирующая сила, действующая на точку M , равна ге-
~
ометрической сумме векторов Fj , j = 1; : : : ; n, ò.å.
~ ~ ~
Xn
R = F1 + +Fn = km1(~r1 ~r)+ +kmn(~rn ~r) kmj (~rj ~r):
j=1
Выражение в правой части последней формулы после знака тождественного равенства есть краткая запись n слагаемых, стоящих в средней части формулы. Знак P9 означает суммиро-
9Прописная буква сигма греческого алфавита.
Ÿ 2. Примеры векторов |
27 |
вание величин, каждая из которых получается из общего члена суммы kmj (~rj ~r), когда индекс суммирования j пробегает все целые значения от наименьшего числа j, указанного снизу знака P; до наибольшего значения, указанного над знаком P : Â
~
формуле для равнодействующей R суммирование проводится от j = 1 до j = n . Такой способ записи операции суммирования очень удобен, когда слагаемых много, и в дальнейшем неоднократно будет нами использоваться.
Преобразуем формулу для равнодействующей следующим образом. Раскроем скобки в правой части последнего равенства и объединим слагаемые, содержащие радиус-вектор ~r точки M . Получим
|
n |
n |
~ |
X |
X |
R = k mj~rj k~r |
mj : |
|
|
j=1 |
j=1 |
Центром масс m1; m2; : : : ; mn называется точка, положение которой определяется радиус-вектором:
|
n |
|
|
~rc = |
j=1 mj~rj |
: |
(1.26) |
n |
|||
|
P |
|
|
|
P j=1 mj |
|
|
Используя это определение вектора ~rc , можно переписать выражение для равнодействующей следующим образом:
~
R = k(m1 + + mn)(~rc ~r):
Последняя формула означает, что равнодействующая направлена к центру масс и пропорциональна их сумме. Из этой же формулы сразу вытекает, что точка M будет в равновесии, если ~r = ~rc, т.е. когда точка M находится в центре масс
m1; m2; : : : ; mn.
Задачи
13.Доказать, что если диагонали четырехугольника делят друг друга пополам, то четырехугольник есть параллелограмм.
Указание. Используя формулу (1.15), выразить радиус-вектор точки пересечения диагоналей через радиус-векторы противолежащих вершин четырехугольника.
14.Найти центр масс трех материальных точек M1(~r1), M2(~r2), M3(~r3), в которых сосредоточены массы m1; m2; m3,

28 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
зная, что центр тяжести двух масс лежит на линии, соединяющей эти массы, и делит ее в отношении, обратно пропорциональном массам.
15. Точки M и N середины |
~vA |
A |
|
сторон AB и CD четырехугольника |
|
ABCD. Доказать, что середины P; ~a |
B |
K; Q отрезков BC; M N; AD лежат |
|
на одной прямой. |
Ðèñ. 21 |
|
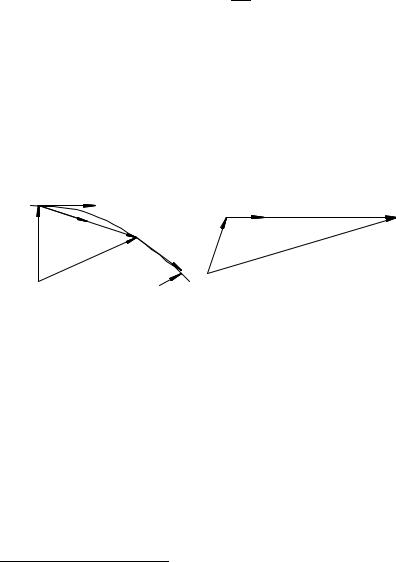
16. При равноускоренном движении тела заданы его на- чальное (точка A) и конечное (точка B) положения, а также направления начальной скорости ~vA и ускорения ~a (рис.21). Графическим построением найти направление скорости ~vB и отношение vB =vA .
Ÿ 3. Линейное пространство
Одна из отличительных черт физики и математики нали- чие большого числа абстрактных понятий, которые можно разделить на два типа: связанные с идеализацией и не связанные с ней. Примерами абстракций первого типа являются материальная точка, плоскость, абсолютно твердое тело, идеальный кристалл и т.п.
Абстракции второго типа позволяют сформулировать много различных задач как некоторую одну задачу и тем самым свести их решение к решению одной задачи. Замечательным является то, что решение этой одной (абстрактной) задачи, как правило, находится легче, чем решение любой из сводимых к ней конкретных задач.
Примером абстракции второго типа, обобщающей понятие вектора, является л и н е й н о е п р о с т р а н с т в о L это совокупность элементов a, b, c,: : :, которые можно ½складывать\ друг с другом и ½умножать \ на числа ; ; ; : : : ; полу- чая при этом элементы того же множества, т.е. для любых a 2 L10 è b 2 L,
10 Çíàê 2 означает принадлежность к множеству, и формула a 2 L чи- тается так: ½элемент а принадлежит эль\, или ½а является элементом множества эль\.
Ÿ 3. Линейное пространство |
29 |
a + b |
2 |
L; |
(1.27) |
b |
2 |
L; |
(1.28) |
причем ½сложенные\ и ½умноженные\ элементы должны удовлетворять следующим условиям:
a + b = b + a; |
~ |
~ |
(1.29) |
||||||
~a + b = b + ~a; |
|||||||||
(a + b) + c = a + (b + c); |
~ |
~ |
|
||||||
(~a + b) + ~c = ~a + (b + ~c);(1.30) |
|||||||||
|
|
1a = a; |
1~a = ~a; |
|
(1.31) |
||||
( a ) = ( )a ; |
( ~a) = ( )~a; |
(1.32) |
|||||||
( + )a = a + a; |
( + )~a = ~a + ~a; |
(1.33) |
|||||||
(a + b) = a + b; |
~ |
~ |
(1.34) |
||||||
(~a + b) = ~a + b; |
|||||||||
и пространство L содержит нуль-элемент 0, такой, что |
|
||||||||
|
+ |
|
|
= |
|
; |
0 + ~a = ~a; |
(1.35) |
|
0 |
|
a |
|
a |
|
~ |
|
|
|
|
0 |
a |
= |
0 |
; |
~ |
|
(1.36) |
|
|
|
|
0~a = 0: |
|
|||||
Говоря о ½сложении\ элементов линейного пространства и об ½умножении\ их на числа, следует помнить, что эти действия требуют своего определения в каждом конкретном случае.
Для сравнения в формулах (1.29)-(1.36) рядом со свойствами линейного пространства даны соответствующие свойства векторов. Нетрудно заметить, что векторы удовлетворяют всем свойствам линейного пространства. Именно поэтому в общем случае элементы линейного пространства также называют векторами. Эти векторы мы будем отмечать полужирным шриф-
~
том a, b, c; : : :, отличая тем самым их от векторов ~a; b; ~c; : : :, геометрическими образами которых являются направленные отрезки, складываемые по правилу параллелограмма (треугольника).
Привед¼м ещ¼ ряд примеров линейных пространств.
3.1.Примеры линейных пространств.
П р и м е р 10. Если на прямой линии заданы начало координат, единица масштаба и направление, то каждой точке этой
30 Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ
прямой можно сопоставить число (положительное, если точка лежит от начала координат в направлении оси, и отрицательное в противном случае). Эти числа образуют множество действительных чисел R линейное пространство, в котором операцией сложения является обычное арифметическое сложение. Нулевой элемент число 0.
П р и м е р 11. М н о ж е с т в о к о м п л е к с н ы х ч и с е л C: Выберем на плоскости прямоугольную систему координат.
Тогда каждая точка z плоскости однозначно характеризуется парой действительных чисел: абсциссой a и ординатой b. Условимся записывать точки плоскости через z = (a; b).
Пары действительных чисел a и b, соответствующие всем точкам плоскости, называется комплексными числами z = (a; b), если они подчиняются следующим правилам сложения и умножения:
суммой комплексных чисел z1 = (a1; b1) è z2 = (a2; b2) является комплексное число z = (a; b), у которого a = a1 + a2 è b = b1 + b2, òî åñòü
z 1 + z 2 = (a1; b1) + (a2; b2) = (a1 + a2; b1 + b2); (1 )
произведение двух чисел z1 = (a1; b1) è z2 |
= (a2; b2) ýòî |
|
комплексное число z = (a; b), такое, что a |
= a1a2 b1b2, è |
|
b = a1b2 + a2b1, èëè |
|
|
z 1z 2 = (a1; b1)(a2; b2) = (a1a2 b1b2; a1b2 + a2b1): |
(2 ) |
|
Плоскость, на которой изображаются комплексные числа, называется плоскостью комплексного переменного.
Очевидно, что два комплексных числа z 1 = (a1; b1) è z 2 = (a2; b2) равны друг другу, т.е. им соответствует одна точка на плоскости комплексного переменного, в том и только в том слу- чае, если a1 = a2 è b1 = b2.
Разностью двух комплексных чисел z 1 = (a1; b1) è z 2 = (a2; b2) будет такое z = (a; b), что
z 1 = z 2 + z ; èëè (a1; b1) = (a2; b2) + (a; b):