

u_lectures
.pdf83
ϕ1 – угол, при котором A(ω) =1,
γ =180o +ϕ1 – запас устойчивости по фазе.
При использовании ЛЧХ запасы устойчивости определяются следующим
образом. |
|
|
|
|
|
|
20 lg Kкр |
|
|
|
|||
φ |
L, дБ |
|
|
|
||
|
|
|
|
|
|
|
|
20 lg Kз |
|
|
|
L=20 lg K |
|
0 |
|
ωс |
||||
|
|
|
|
|||
|
|
|
|
|
||
|
|
|
ω, с–1 |
|||
|
|
|
|
|||
|
|
|
|
|
||
φр(ω)
–90
γ
–180
Рис. 8.5
2. Корневые способы оценки качества.
Запас устойчивости при исследовании системы с помощью корней характеристического уравнения оценивается следующими величинами:
степенью устойчивости и колебательностью.
Степень устойчивости – это абсолютное значение вещественной части корня, расположенного наиболее близко к мнимой оси
η = α min
Колебательностью называется величина
λ= tgθ = βi
αi
3. Интегральные методы оценки качества.
Наиболее часто используется интегральная квадратичная оценка
∞
I = ∫ х2 (t)dt ,
0
где: х(t) – ошибка системы.
Рис. 8.6
|
84 |
В этом случае |
качество регулирования характеризуется одним |
показателем. |
|

85
9. СИНТЕЗ СИСТЕМ РЕГУЛИРОВАНИЯ
Если САУ неустойчива или ее показатели качества не соответствуют требуемым значениям, то проводят синтез системы. Будем рассматривать задачу частичного синтеза. При этом задан объект регулирования и требуется подобрать структуру и параметры регулятора или параметры корректирующего устройства так, чтобы обеспечить заданные показатели качества.
Корректирующие звенья существуют трех типов:
последовательные,
параллельные корректирующие устройства в виде местных обратных связей,
согласно-параллельные корректирующие устройства.
Задача синтеза систем управления занимает центральное место в теории автоматического управления. Поэтому для ее решения разработано большое количество методов, основанных как на математическом описании в виде передаточных функций и структурных схем, так и на уравнениях пространства состояний. Одним из наиболее удобных и распространенных
графоаналитических методов является метод логарифмических частотных характеристик.
В последние годы в связи с доступностью ЭВМ и программных продуктов широко применяются оптимизационные процедуры для решения задач синтеза. При этом производится направленный перебор параметров корректирующих устройств с целью достижения заданного критерия качества работы проектируемой системы. Эти методы могут взаимно дополнять друг друга и обеспечивать эффективное решение задачи.
9.1. Выбор последовательных корректирующих устройств
Пусть задана нескорректированная САУ с передаточной функцией
WH ( p) .
XВХ(p) |
WK(p) |
|
|
XВЫХ(p) |
||||
|
WН(p) |
|||||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
86
Рис. 9.1
Допустим, что последовательно в систему включается корректирующее звено с передаточной функцией WK ( p) , следовательно,
структурная схема будет иметь вид, показанный на рис. 9.1. Передаточная функция разомкнутой скорректированной системы будет равна:
WC ( p ) =WH ( p ) WK ( p ). |
(9.1) |
|||||||||||
Перейдем к ЛЧХ: |
|
|||||||||||
20 lg |
|
WC ( jω ) |
|
= 20 lg |
|
WH ( jω ) |
|
+ 20 lg |
|
WK ( jω ) |
|
(9.2) |
|
|
|
|
|
|
|||||||
или |
|
|||||||||||
LC (ω ) = LH (ω ) + LK (ω ), |
|
|||||||||||
откуда получим |
|
|||||||||||
LK (ω ) = LC (ω ) − LH (ω ), |
(9.3) |
|||||||||||
и, соответственно, |
|
|||||||||||
ϕK (ω ) = ϕC (ω ) −ϕH (ω ). |
(9.4) |
|||||||||||
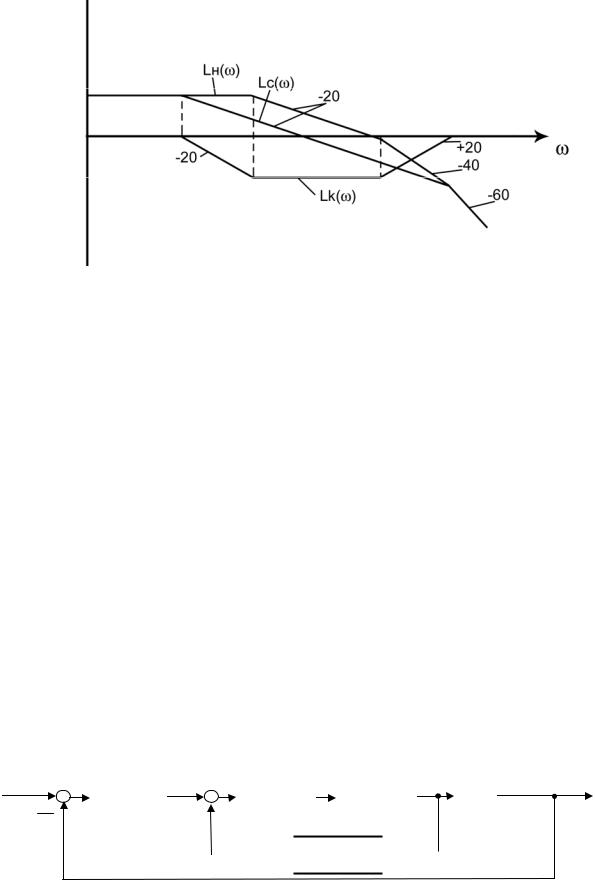
Выражение (9.3) является исходным для выбора корректирующих устройств.
Порядок выбора последовательного корректирующего устройства.
1.Строится логарифмическая амплитудно-частотная характеристика нескорректированной системы LH (ω ).
2.Строится логарифмическая амплитудно-частотная характеристика скорректированной системы LC (ω ), которая называется желаемой.
3.Путем графического вычитания, согласно (9.3), получаем логарифмическую амплитудно-частотную характеристику корректирующего
звена LK (ω ).
4. По виду LK (ω ) выбирают тип корректирующего устройства, его передаточную функцию, а затем схему устройства.
87
Рис. 9.2
9.2. Выбор параллельных корректирующих устройств в виде обратных связей
Параллельные корректирующие устройства представляют собой обратные связи, охватывающие часть звеньев системы. Обратные связи могут быть жесткие и гибкие, чаще всего отрицательные. При выборе параллельного корректирующего звена необходимо определить точку измерения сигнала и точку ввода обратной связи. Параллельные корректирующие устройства изменяют динамические, а иногда и статические свойства системы.
Обычно обратная связь должна охватывать часть системы регулирования, имеющую наибольший коэффициент усиления.
На рис. 9.3 представлена нескорректированная система и выбран вариант включения корректирующего звена с передаточной функцией WK(p).
XВХ(р) |
|
|
|
|
|
|
|
|
|
XВЫХ(р) |
W1 ( р) |
|
|
|
W2 ( p ) |
|
W3 ( р) |
|
W4 ( р) |
||
|
|
|
|
|
|
|
 WK ( р)
WK ( р) 
88
Рис. 9.3
Передаточная функция разомкнутой скорректированной системы имеет
вид: |
WHO ( p ) WОХВ( p ) |
|
|
|
||
W ( p ) = |
|
, |
(9.5) |
|||
|
||||||
C |
1 |
+WK ( p ) WОХВ( p ) |
|
|
||
|
|
|
||||
где WHO ( p ) =W1 ( p ) W4 ( p ) – передаточная функция звеньев, неохваченных обратной связью, WОХВ( jω ) =W2 ( jω ) W3( jω ) – передаточная функция
звеньев, охваченных обратной связью.
Перейдем к частотной передаточной функции
W ( jω ) = |
WHO ( jω ) WОХВ( jω ) |
|
, |
(9.6) |
|
|
|||||
C |
1 |
+WK ( jω ) WОХВ( jω ) |
|
|
|
|
|
|
|||
Обычно корректирующим звеном охватываются звенья с большим коэффициентом усиления, поэтому рассмотрим диапазон частот, где выполняется условие:
WK ( jω ) WОХВ( jω ) >> 1.
Тогда (9.6) можно записать |
|
||||||||||||||||||
WC′( jω ) = |
WHO ( jω ) |
. |
|
|
|
|
|
|
|
|
(9.7) |
||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
WK ( jω ) |
|
|||||||||||||
Если перейти к ЛЧХ, то получим |
|
||||||||||||||||||
20lg |
|
WC′( jω ) |
|
= 20lg |
|
WHO ( jω ) |
|
− 20lg |
|
WK ( jω ) |
|
, |
|
||||||
|
|
|
|
|
|
|
|||||||||||||
откуда найдем |
|
||||||||||||||||||
LK (ω ) = LHO (ω ) − LC′ (ω ). |
(9.8) |
||||||||||||||||||
В диапазоне частот, где |
|
WK ( jω) WОХВ ( jω) |
|
<<1 |
|
||||||||||||||
|
|
|
|||||||||||||||||
WC ( jω ) =WHO ( jω ) WOXB ( jω ) =WH ( jω ). |
|
||||||||||||||||||
В диапазоне частот, где WK ( jω ) WОХВ( jω ) >> 1, передаточная функция системы имеет вид (9.7) и не зависит от WОХВ( jω ). Это свойство
является большим достоинством параллельного корректирующего
89
устройства, так как параметры части системы с передаточной функцией WОХВ( jω ) не влияют на характеристики системы.
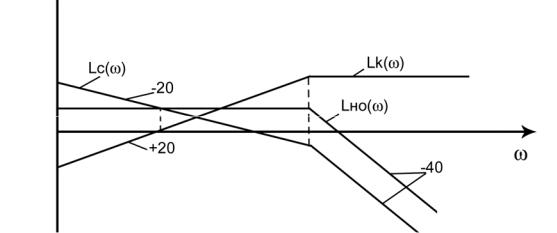
Порядок выбора параллельного корректирующего звена
1.Задаются вариантом включения корректирующего звена.
2.Строится логарифмическая амплитудно-частотная характеристика неохваченной части системы LHO (ω) .
3. |
Строится |
желаемая |
логарифмическая |
амплитудно-частотная |
характеристика скорректированной системы LC (ω) . |
|
|||
4. |
Графически определяется |
характеристика корректирующего звена |
||
LK (ω) по выражению (9.8). |
LK (ω) выбирается |
|
||
5. |
По виду |
характеристики |
тип и передаточная |
|
функция звена, а затем схема реализации корректирующего звена.
Рис. 9.4
Учет неточностей
После выбора корректирующего устройства обычно строят точные характеристики скорректированной системы LC (ω) и ϕC (ω) .
Представим (9.6) следующим образом
W ( jω ) = |
WHO ( jω ) |
|
|
WK ( jω ) WOXB ( jω ) |
. |
(9.9) |
|
|
|
||||
C |
WK ( jω ) 1 |
+WK ( jω ) WOXB ( jω ) |
|
|||
|
|
|||||
Перейдем к ЛЧХ и получим |
|
|||||
LC (ω ) = LHO (ω ) − LK (ω ) + L(ω ) |
(9.10) |
|||||
|
|
|
|
. |
||
ϕC (ω ) =ϕHO (ω ) −ϕK (ω ) + ϕ(ω ) |
|
|||||
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
Ранее поправки L и |
ϕ не учитывались и их |
можно определить по |
||||||||||||
выражениям: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L(ω ) = 20 lg |
|
WOXB ( jω ) WK ( jω ) |
|
, |
(9.11) |
|||||||||
|
|
|||||||||||||
|
1 +WOXB ( jω ) WK ( jω ) |
|
|
|||||||||||
ϕ(ω ) = arg |
|
|
|
WOXB ( jω ) WK ( jω ) |
|
, |
|
|
(9.12) |
|||||
|
|
|
|
|
|
|||||||||
|
1 +W |
( jω ) W |
K |
( jω ) |
|
|
|
|
||||||
|
|
|
|
OXB |
|
|
|
|
|
|
|
|
|
|
где L(ω) и ϕ(ω) |
– это ЛЧХ замкнутого внутреннего контура. И их просто |
|||||||||||||
найти, используя номограмму замыкания [2].
1.Строим характеристики для разомкнутого внутреннего контура
LBK (ω ) = LOXB (ω ) + LK (ω ),
ϕBK (ω ) =ϕOXB (ω ) +ϕK (ω ).
2.Используя LBK (ω) и ϕBK (ω ), по номограмме замыкания находим
L(ω) и ϕ(ω ).
3.Затем по выражениям (9.10) определяем LC (ω) и ϕC (ω) .
Эти характеристики используют для проверки системы на
устойчивость и для построения переходного процесса.
Точные характеристики внутреннего контура и скорректированной системы целесообразно рассчитывать, применяя систему Matlab.
9.3. Построение желаемой логарифмической амплитудночастотной характеристики скорректированной системы
При применении метода логарифмических частотных характеристик для синтеза системы первым этапом является построение желаемой логарифмической амплитудно-частотной характеристики скорректированной системы LC (ω) , которая строится на основе заданных
показателей качества проектируемой системы. Задаются показатели качества:
1.Величина перерегулирования – σ % .
2.Время регулирования – tР с.
3.Коэффициент передачи разомкнутой системы K, который задается или рассчитывается из условий требуемой точности системы в установившемся режиме.
91
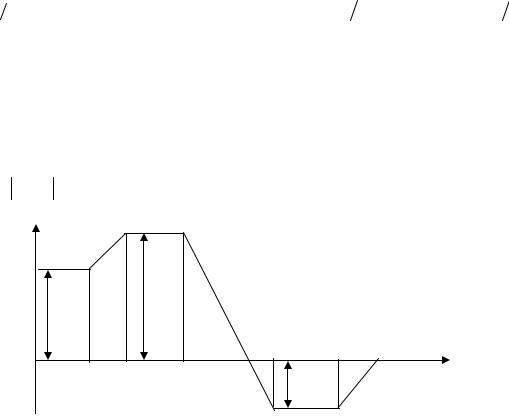
Переходный процесс h(t) определяется вещественной частотной характеристикой замкнутой системы P(ω). Поэтому при построении
желаемой ЛАЧХ используют типовую вещественную характеристику вместо типового переходного процесса.
Типовая вещественная характеристика имеет следующий вид (рис. 9.1) и характеризуется показателями: Pмакс – максимальное значение
вещественной частотной характеристики; |
Pмин – минимальное значение; |
||||
β1 =ωb ωn – |
коэффициент |
формы; |
νd |
= ωd ωn и ν a = ωa ωb – |
|
коэффициенты основного и дополнительного наклонов. |
|||||
Если νd |
≤ 0.8 , νa ≥ 0.4, |
β1 ≥ 0.5, то в этом случае перерегулирование |
|||
σ % зависит |
в основном |
от |
Pмакс . |
При этом переходные процессы в |
|
системе имеют приемлемый вид. Затем, используя Pмакс , можно определить
связь между ωn и tp.
Если P(ω) < 0 , то появляется дополнительное перерегулирование
σ ≤ 0.3 Pмин 100% .
P
P(0) PМАКС
|
|
ω2 |
ω1 ω0 |
|
ωa ωb |
ωd |
ωп |
ω |
|
|
|
|
PМИН |
|
|
Рис. 9.5 |
|
|
|
Желаемая логарифмическая |
амплитудно-частотная |
характеристика |
||
LC (ω) может быть разбита на три характерных участка: |
низкочастотный, |
|||
среднечастотный и высокочастотный, причем вид характеристики зависит от типа системы.
Передаточная функция разомкнутой статической системы имеет вид:
m
K ∏Wi ( p)
WP ( p) = |
i=1 |
, |
(9.13) |
n |
|||
|
∏Wj ( p) |
|
|
j=1
аастатической системы:
|
|
|
|
|
92 |
|
|
m |
|
|
|
|
K |
∏Wi ( p ) |
|
|
|
WP ( p ) = |
|
i=1 |
. |
(9.14) |
|
P N |
n |
|
|||
|
∏W j ( p ) |
|
|
||
j=1
Построение LC (ω) производится в следующем порядке:
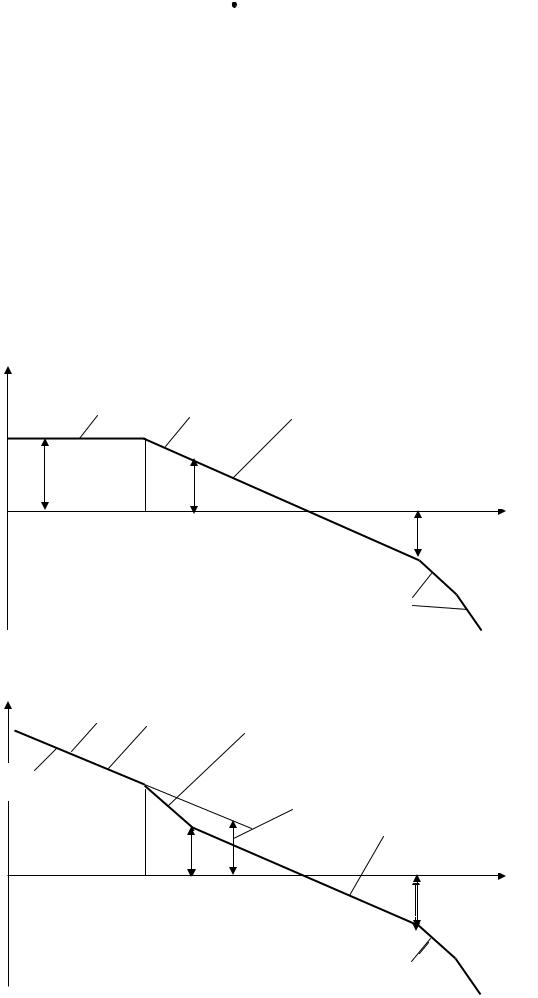
1. Для статических систем низкочастотный участок НЧ имеет вид горизонтальной линии и отстоит от оси абсцисс на 20lg K (рис. 9.6).
Для астатических систем НЧ участок имеет наклон − 20 N дБ/дек, где N – число интегрирующих звеньев. При частоте ω =1 находим ординату 20lg K и через полученную точку «А» проводим прямую линию (рис. 9.7).
Низкочастотный участок определяет точность воспроизведения системой медленно меняющихся воздействий.
L, дБ
НЧ LC(ω) СЧ
20 lg K |
L1 |
-20 дБ/дек |
|
ω, с-1 |
|
ω3 |
|||
|
ω1 ω2 |
ωС |
L2 |
|
|
|
|
|
-40 дБ/дек |
Рис. 9.6 |
|
|
ВЧ |
-60 дБ/дек |
|
|
|
L, дБ НЧ |
LC(ω) |
|
|
|
|
|||||||
|
Сопрягающая прямая |
|
|
|
||||||||
-20 N дБ/дек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
20 lg K |
|
|
|
|
|
|
|
|
|
L1 |
|
|
-20 дБ/дек |
СЧ |
|
|
||||
|
|
|
|
|
|
|
|
|
|
-1 |
||
|
|
|
|
|
ω3 |
|
|
|||||
|
|
1 |
|
|
|
|
|
|
ω,, с-1 |
|||
ω |
ω |
ω=1 |
ωС |
|
3 |
|
|
|
||||
|
|
|
|
|
|
|
||||||
|
|
L2 |
|
|
||||||||
1 |
2 |
|
|
С |
|
|
|
|
||||
1 |
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
- |
|
/ |
||||
|
|
|
Рис. 9.7 |
|
|
|
-40 дБ/дек |
|||||
|
|
|
ВЧ |
- |
/ |
|||||||
|
|
|
|
|
|
-60 дБ/дек |
||||||