

u_lectures
.pdf
|
203 |
|
|
|
|
|
||
u(n) = u(n −1) + k |
[x(n) + |
|
−1 |
+ |
T |
|
x(n −1) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|||
|
|
|
|
|
TI |
|
|
|
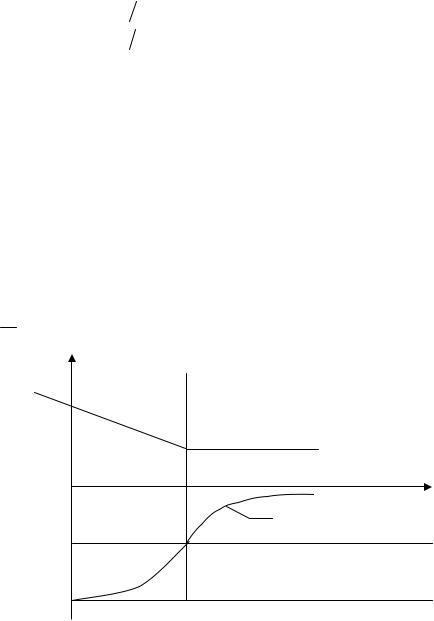
Рассмотрим переходную функцию ПИ-регулятора.
1 при n ≥ 0
Тогда входной сигнал имеет вид x(n) = .
0 при n < 0
Коэффициенты разностного уравнения будут равны: q0 = k
|
|
|
T |
|
|
q1 |
= |
−1+ |
k |
||
|
|||||
|
|
|
TI |
||
Переходная функция изображена на рисунке рис. 24.6.
u(n)
|
|
|
|
T |
|
|
T |
|
q0 + q1 |
|
|
|
|
||||
|
|
|
|
|
||||
= k 1/ −1/ |
+ T |
|
|
= k T |
||||
|
|
|
||||||
|
|
|
|
|
I |
|
I |
|
x(n)
q0 = k
0 |
T |
2T |
3T |
n |
Рис. 24.6 .
24.5. Выбор параметров цифрового регулятора
Существует 2 основных способа для определения параметров П, ПИ -
иПИД – регуляторов.
1)Когда период квантования мал по сравнению с постоянными
времени системы управления, то есть Т < Ti, тогда определение параметров может быть выполнено как для непрерывной системы, то есть определяют k, TI и TD аналогового регулятора.
204
Затем, используя полученные значения, определяют коэффициенты разностного уравнения q0, q1, q2, которые закладывают в уравнение
регулятора, реализуемого на ЭВМ. |
|
|
|
|
|||||||||||||||
|
|
|
|
Пусть имеем ПИ – регулятор. |
|
|
|
|
|||||||||||
|
|
|
|
а) Если интегрирование проводится по методу прямоугольников, т.е. |
|||||||||||||||
|
1 |
|
≈ |
T |
|
|
|
|
|
W ( p) = k |
1+ |
1 |
|
|
|||||
|
p |
z −1 |
|
|
T p |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
тогда W (z) = k |
|
+ |
|
|
T |
|
|
|
|
|
|
|
||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
T (z −1) |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
u(n) = u(n −1) + k |
x(n) + −1 |
+ |
|
|
x(n −1) |
|
|||||||||||||
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
TI |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
q0 |
= k; q1 = k |
−1+ |
. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
TI |
|
|
|
|
|
|
|
|
||
б) Если интегрирование проводится по методу прямоугольников с упреждением
1 |
≈ T |
|
z |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z −1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
тогда W (z) = k |
1+ |
|
|
|
Tz |
|
|
- передаточная функция |
|||||||||
|
T (z −1) |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
u(n) = u(n − |
1) |
+ k 1 |
+ |
|
|
x(n) − kx(n −1) - разностноое уравнение |
|||||||||||
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
TI |
|
|
|
|
q0 = k |
|
|
T |
|
|
; q1 |
= −k. |
|
|
|
|||||||
1+ |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
TI |
|
|
|
|
|
|
|
|
|
|
||||
2) Когда период квантования соизмерим с постоянными времени системы, то требуется определять параметры цифрового регулятора на основе параметрического синтеза регулятора, который в общем случае может проводиться следующими методами:
− методом ЛЧХ, используя билинейное преобразование; −корневого годографа на z – плоскости;
− методом синтеза обратных связей по переменным состояния.
Так как передаточная функция разомкнутой ЦСАУ Wp (z) =Wцр ( p) WH (z) ,
то при определении параметров регулятора методом ЛЧХ необходимо построить ЛЧХ непрерывной части системы и цифрового регулятора. А ЛЧХ разомкнутой системы будет равна сумме построенных характеристик. Построение ЛЧХ по передаточной функции WH(z) было рассмотрено ранее. Рассмотрим построение ЛЧХ для ПИ – регулятора.
205
Пусть интегрирование выполняется по методу прямоугольников
W (z) = k |
1+ |
|
T |
|
(24.9) |
|
T |
(z −1) |
|||||
|
|
|
||||
|
|
I |
|
|
|
|
Применим подстановку
z = 1+ wT 2 1− wT 2
Получим
* |
|
τ*w+1 |
, |
|
|
|
|
(24.10) |
|||||
W(w) =k |
|
|
* |
w |
|
|
|
|
|
||||
|
|
|
|
τ |
|
|
|
|
|
|
|
||
|
|
|
|
T |
|
|
|
|
|
|
T |
|
|
где k* = k 1 |
− |
|
|
, |
τ* =TI 1 |
− |
|
(24.11) |
|||||
|
|
|
|||||||||||
|
|
|
|
2TI |
|
|
|
|
2TI |
|
|||
Подставив w = jω, получим
* |
) = k |
* τ* jω* +1 |
(24.12) |
W ( jω |
τ* jω* |
||
|
|
|
По последнему выражению построим ЛЧХ Из (24.11) следует, что такой регулятор нецелесообразно применять при
T > 2 , так как звено становится неминимально – фазовым (τ < 0).
TI
ϕ0 |
|
1 |
|
τ * |
|||
|
|||
 20 lg(k*) ω*
20 lg(k*) ω*
-45 |
ϕ |
|
-90
Рис. 24.7
Суммируя ЛЧХ неизменяемой части LH(ω*) и регулятора L(ω*) подбираем параметры регулятора k* и τ* так, чтобы разомкнутая система имела требуемый запас устойчивости по фазе.
После этого по выражениям (24.11) находим k и TI, используя которые находим коэффициенты q0 и q1, которые необходимы для реализации алгоритма работы микроЭВМ.
25. ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ ЦИФРОВЫХ САУ
Для реализации цифровых САУ необходимы:

206
−микроЭВМ и устройства связи с объектом (АЦП, ЦАП, дискретные устройства),
−цифровые датчики сигналов.
Типы применяемых микроЭВМ
Подразделяются по назначению и исполнению на три основные группы:
−универсальные серийные микроЭВМ,
−проблемно – ориентированные микроЭВМ,
−специализированные микроЭВМ.
К универсальным серийным микроЭВМ относятся: микроЭВМ серии «Электроника 60» , «Электроника НЦ – 80 – 1»,«Электроника К1 – 20» .
МикроЭВМ «Электроника 60» являются многоплатными моделями, поставляемыми в конструктивно и функционально законченном виде.
МикроЭВМ «Электроника 60» широко применяются в промышленном оборудовании: роботах, станках с ЧПУ.
Развитием этой серии является микроЭВМ «Электроника 81Б» с быстродействием до 1млн опс и «Электроника НМС 11100.1».
МикроЭВМ «Электроника К1 – 20» относится к семейству микроЭВМ
иконтроллеров серии «Электроника К» и предназначена для использования в системах управления и контроля, а также для отладки программного обеспечения на уровне машинных команд.
Кчислу универсальных относятся и однокристальные микроЭВМ. Однокристальные микроЭВМ кроме процессора включают также АЦП
иЦАП, и позволяют создать простые цифровые регуляторы в одном кристалле.
Одним из представителей этого класса элементов является аналоговый микрокомпьютер К1813. Благодаря высокому быстродействию и многоразрядным арифметическим операциям такой регулятор превосходит по характеристикам аналогичный регулятор, выполненный на универсальной ЭВМ.
|
Типы однокристальных микроЭВМ |
Таблица 25.1 |
|||
Тип |
Разря |
|
|
Число |
|
Объем |
Объем |
цифровых |
Частота |
||
микроЭВМ |
дност |
ОЗУ, бит |
ПЗУ, бит |
входов- |
МГц |
|
ь |
|
|
выходов |
|
|
|
|
|
|
|
1820ВЕ1 |
4 |
64×4 |
1К×8 |
16 |
1,6 |
1816ВЕ48 |
8 |
64×8 |
1К×8 |
24 |
6 |
С5 – 31 |
16 |
512×16 |
1К×16 |
24 |
2 |
1801ВЕ1 |
16 |
128×16 |
1К016 |
24 |
8 |
1816ВЕ51 |
8 |
128×8 |
4К×8 |
24 |
4 |
207
Исполнение накладывает ограничения на ОЗУ (объем 64 – 512 слов), ПЗУ (объем 1 – 2К слов). В ОЗУ хранятся только данные, а ПЗУ – программа.
Проблемно – ориентированные микроЭВМ
Кпроблемно-ориентированным относятся микроЭВМ, предназначенные для решения задач управления внешними объектами.
По степени универсальности использования их подразделяют на специализированные, работающие по жесткой программе, и модели широкого применения, программа действия которых заносятся во внешние запоминающиеся устройства и может изменяться самим пользователем.
Ктаким микроЭВМ относятся: РЕМИКОНТ (МПК580), КТС ЛИУС
(МПК580), МС 11100 (МПК1801), Микро–ДАТ, SIMATIC, БВУ – 9200 (МПК589) – для целей управления следящими системами, построенными на базе тиристорных преобразователей.
РЕМИКОНТ - регулирующий микроконтроллер.
Входные цепи рассчитаны на подключение аналоговых и дискретных датчиков, а выходные цепи формируют аналоговые и дискретные сигналы для управления исполнительными устройствами.
Программируется РЕМИКОНТ с помощью специализированной клавишной панели.
Средства аналогового входа – выхода содержат узлы гальванического разделения сигналов, узел мультиплексирования аналоговых входных сигналов и группу преобразователей: АЦП, ЦАП, дискретно – цифровой и цифро-дискретный преобразователи.
Перечисленные узлы ввода – вывода аналоговой и дискретной информации позволяют сопрягать РЕМИКОНТ с аналоговыми и дискретными датчиками, с исполнительными механизмами пропорционального, интегрирующего и другого действия.
Особенность: большая часть памяти программируется на заводе изготовителе, отсутствуют обычные средства ввода и отладки программ, а также средства сопряжения с ними.
Пульт оператора используется для установки требуемой конфигурации регулирующего контура, выбора алгоритма управления, контроля значения технологических переменных, оперативного вмешательства в процесс управления.
Структура контролера имеет ту особенность, что она описывает свойства контролера в понятиях традиционных для САУ.
Вариант исполнения: 8-ми канальный: 16 аналоговых и 32 дискретных входа, 8 автономных каналов управления с 8-ю входами на каждый канал.
Упрощается программирование и отладка программ. Технические характеристики ЦАП и АЦП
Свойства ЦАП характеризуются параметрами: разрядность, точность, время установления, точность.
208
Свойства АЦП определяются: точность, разрядность, время преобразования.
Характеристики АЦП.
|
|
|
|
Таблица 25.2 |
Тип |
Число |
Разрядность |
Быстродействие, |
Входные |
|
входов |
|
мкс |
напряжения, В |
572ПВ1 |
1 |
12 |
110 |
5 – 15 |
1113ПВ1 |
1 |
10 |
20 |
5 – 15 |
1107ПВ1 |
1 |
6 |
0,05 |
-2 – 0 |
СМ1800 |
8 |
16 |
105 |
0 - ±5 |
АВВ03П |
16 |
10 |
70 |
±0,6 - ±10 |
В зависимости от разрядности характеристики АЦП имеют вид:
Таблица 25.3
Длина слова |
7 |
8 |
10 |
12 |
15 |
|
Количество |
127 |
255 |
1023 |
4095 |
32767 |
|
уровней 2n −1 |
||||||
|
|
|
|
|
||
Разрешающая |
|
|
|
|
|
|
способность, |
0,787 |
0,392 |
0,098 |
0,024 |
0,003 |
|
% |
|
|
|
|
|
МОДУЛЬ 3. НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕКОГО УПРАВЛЕНИЯ
РАЗДЕЛ 5. НЕЛИНЕЙНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
26. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ НЕЛИНЕЙНЫХ САУ
26.1. Особенности нелинейных систем управления
Рассмотренные ранее системы, в том числе и импульсные, описываются линейными дифференциальными уравнениями. Однако существуют системы, которые могут быть описаны только нелинейными дифференциальными уравнениями.
Если система содержит хотя бы одно НЗ, то она называется нелинейной
САУ.
Нелинейные системы часто встречаются на практике. Вообще большинство САУ является нелинейными и лишь для упрощения задач анализа и синтеза проводится их линеаризация, то есть НЗ заменяется приближенным линейным при ограниченных пределах изменения входной величины.
209
Существуют нелинейные объекты регулирования. Кроме того, НЗ вводят в систему преднамеренно для улучшения качества процесса регулирования.
Перед теорией регулирования нелинейных систем стоят задачи:
1) Анализ, то есть исследование процессов в НЗ, исследование устойчивости и качества переходных процессов нелинейных систем.
2) Синтез, то есть выбор корректирующих устройств, параметров или структуры с целью получения заданного качества переходных процессов.
ТАУ нелинейных систем имеет особенности:
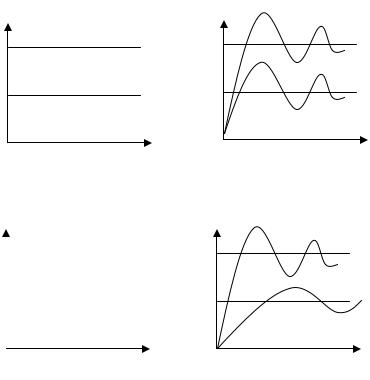
1. При анализе процессов в нелинейных системах нельзя использовать принцип суперпозиции, так как в нелинейных системах качественные показатели переходной характеристики зависят от уровня входного сигнала.
В линейных системах принцип суперпозиции может быть использован. Реакция на ступенчатое воздействие приведена на рис. 26.1.
Xвх |
2(t) |
Xвых |
|
|
2 |
|
1(t) |
1 |
|
|
|
|
t |
t |
Рис. 26.1
Для нелинейных систем нельзя использовать принцип суперпозиции, так как реакция на ступенчатый сигнал может иметь вид (рис. 26.2).
Xвх |
2(t) |
Xвых |
|
|
2 |
||
|
|
|
|
|
1(t) |
||
|
1 |
||
|
|
|
|
|
t |
||
|
t |
||
|
|
Рис. 26.2 |
|
Это затрудняет исследование нелинейных систем. И для нелинейных систем теряют смысл показатели качества систем при единичном входном воздействии, такие как tp и σ%.
2. В нелинейных САУ иначе рассматривается вопрос устойчивости. Если в линейных САУ незатухающие колебания являются признаком неработоспособности системы, то в нелинейных системах такой режим является допустимым, а иногда и единственно возможным и под устойчивостью в этом случае понимается устойчивость автоколебаний.
При исследовании нелинейных систем часто используют понятие устойчивости в некоторой области. В этом случае понятие устойчивости для нелинейных систем совпадает с понятием устойчивости для линейных систем.
210
3.Нелинейные системы описываются нелинейными дифференциальными уравнениями и сложность решения нелинейных дифференциальных уравнений привела к созданию ряда приближенных методов.
Существует аналитические, графические методы, а также широко применяют ЭВМ.
Для решения задач анализа и синтеза систем разработаны методы. Точные: метод припасования, метод фазовой плоскости. Приближенные: метод гармонической линеаризации, метод
гармонического баланса, метод статистической линеаризации.
Теория нелинейных систем разработана в трудах советских ученых: Крылова А. Н, Боголюбова Е. В., Андронова А. А, Попова Е. П. и других.
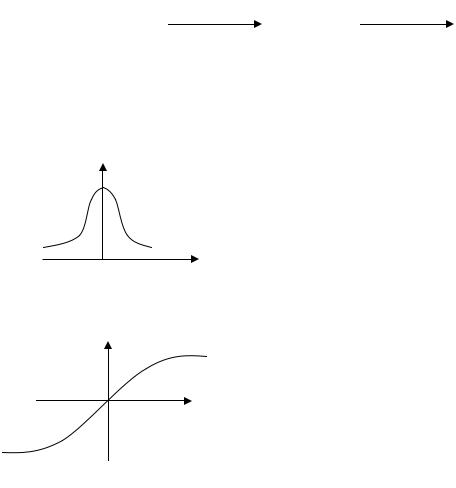
26.2. Общие характеристики НЗ
Характеристика нелинейного одномерного звена может быть записана следующим образом x2=F(x1)
X1 |
НЗ |
X2 |
|
|
|
|
|
|
Рис. 26.3
где F(x1) - нелинейная функция, которая может иметь определенные свойства.
1) Симметрия
|
а) Если F(x) удовлетворяет условию |
|
X2 |
F(x1) = F(-x1), то она симметрична относительно |
|
оси ординат. |
||
|
X1
Рис. 26.4
X2 |
б) |
Если |
функция |
F(x) |
удовлетворяет |
|
|||||
|
условию F(x1) = -F(-x1), то нелинейная функция |
||||
X1 |
обладает |
симметрией |
относительно начала |
||
координат. |
|
|
|
||
Рис. 26.5 |
|
|
|
|
|
2) Гладкость. |
|
|
|
|
|

 C
C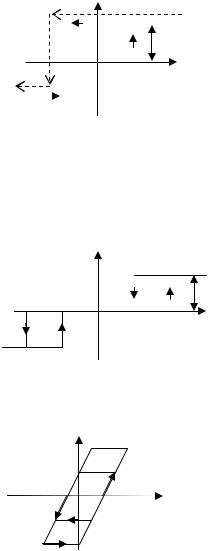
212
X1
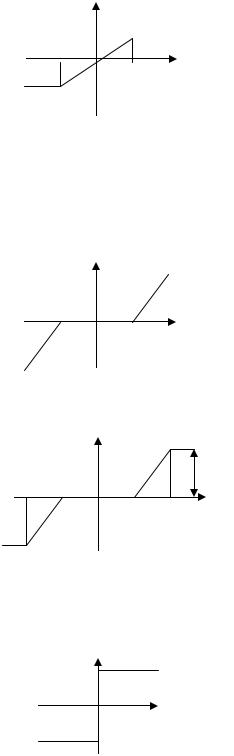
26.4.Звенья с неоднозначными характеристиками
1)Двухпозиционное реле с гистерезисом.
Аналогом такого звена является поляризованное реле с нейтральной настройкой, то есть без средней точки.
X2
|
|
|
|
С |
|
|
|
-b |
b X1 |
||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 26.10 |
|
|
|
|
|
|
|
|
|
|
2) Трехпозиционное реле с гистерезисом.
X2
-b -mb |
|
|
С |
|
|
|
|
|
mb b X1 |
||
Рис. 26.11
3) Звено типа “ люфт “.
X2
-b
b X1
Рис. 26.12
4) Звено типа “ упор “.