

u_lectures
.pdf233
нулевых корней. Это соответствует тому, что передаточная функция линейной части имеет не более двух нулевых полюсов.
= R( p)
W ( p) (29.6)
Q( p)
Теорема: Для установления устойчивости нелинейной системы достаточно подобрать такое действительное число h>0, чтобы при всех значениях частоты ω≥0 выполнялось условие
Re(1+ jωh)W ( jω) + |
|
1 |
> 0 |
|
|
(29.7) |
|
|
|
|
|
||||
|
|
kн |
|
|
|
||
То есть действительная часть выражения должна быть больше 0. |
|||||||
W(jω) - амплитудно-фазовая характеристика линейной части. |
|
||||||
При наличии 1 нулевого корня необходимо выполнить следующие |
|||||||
условия . |
|
|
|
|
|
|
|
ImW(jω)→ -∞, при ω→ 0 |
|
|
(29.8) |
||||
При двух нулевых корнях |
|
|
|
||||
ReW(jω)→ -∞, при ω→ 0 |
|
|
(29.9) |
||||
ImW(jω)<0 , при малых ω. |
|
|
|
||||
Чтобы |
графически |
|
решить |
данную |
задачу |
вводится, |
|
модифицированная частотная характеристика. |
|
|
|||||
W*(jω)=U*(ω)+jV*(ω), имеющая следующие свойства: |
|
||||||
U*(ω) = Re W*(jω) = ReW(jω) |
|
|
|
||||
V*(ω) = ω ImW(jω) |
|
|
|
|
(29.10) |
||
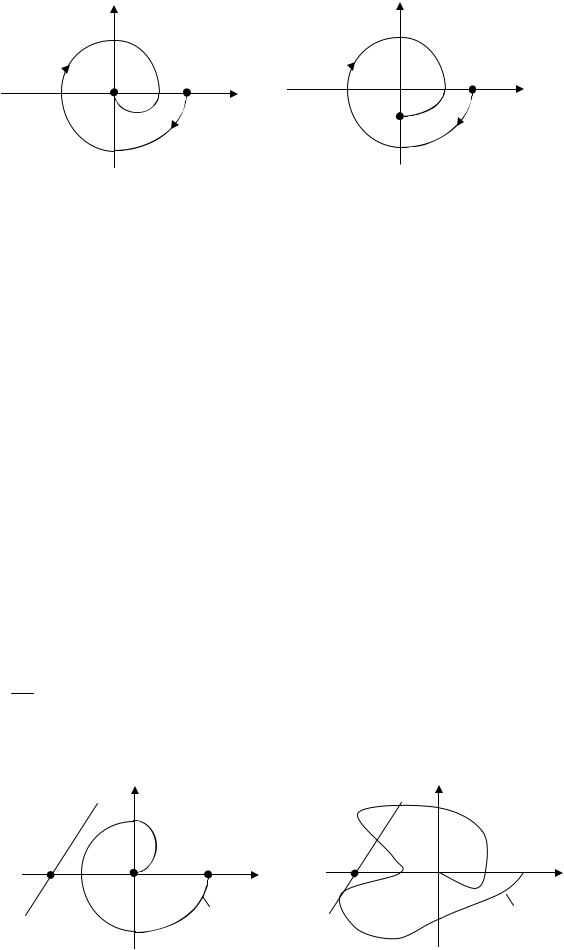
На рис. 29.3 приведены примеры, показывающие взаимную связь годографов W*(jω) и W(jω) при отсутствии нулевых корней (рис. 29.3,а) и наличии одного нулевого корня (рис. 29.3,б).
|
Im |
|
Im |
|
|
|
|
|
|
|
ω=∞ |
ω=0 Re |
ω=∞ |
Re |
|
|
|||
ω |
ω=1 |
W(jω) |
ω=0 |
|
|
W*(jω) |
W*(jω) |
|
|
|
W(jω) |
|
||
|
|
|
|
|
|
|
|
ω→0 |
|
|
а |
|
б |
|
234
Рис. 29.3
Годограф W*(jω) при n-m>1,где n,m – степени полиномов имеет вид
V* |
|
|
|
|
|
|
|
|
V* |
n-m=1 |
|
|
|||||||
n-m>1 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
bm |
|
|
|
|||
ω=∞ |
|
|
|
U* |
ω=∞ |
|
a n |
U* |
|||||||||||
|
|
|
|
|
|
|
|
|
b0 * |
|
|
|
|
|
|
|
|
||
W*(jω) |
|
a0 |
|
* |
(jω) |
||||||||||||||
|
|
|
|
W |
|||||||||||||||
а |
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Рис. 29.4 |
|
|
|
|
|
|
|
|
|||
Преобразуем левую часть неравенства (29.7) |
|
|
|
|
|
|
|
|
|||||||||||
Re(1+ jωh)W ( jω) + |
|
1 |
= ReW ( jω) −ωh ImW ( jω) + |
|
1 |
(29.11) |
|||||||||||||
|
|
|
kн |
||||||||||||||||
|
|
|
|
|
kн |
|
|
|
|
|
|
|
|
||||||
Положим W*(jω)=U*(ω)+jV*(ω), и использовав (29.9), получим для |
|||||||||||||||||||
теоремы Попова |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U * (ω) −hV * (ω) + |
1 |
≥ 0 |
|
V * = |
1 |
(U * + |
1 |
) |
|||||||||||
|
h |
|
|
||||||||||||||||
|
kн |
|
|
|
|
|
|
|
|
|
|
|
|
|
kн |
||||
Очевидно, что равенство |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
U *(ω) −hV *(ω) + |
|
|
1 |
= 0 |
-это уравнение прямой |
на плоскости |
|||||||||||||
|
|
|
|||||||||||||||||
|
|
kн |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W*(jω).
Отсюда теорему Попова можно сформулировать так:
Для установления устойчивости нелинейной системы на плоскости W*(jω) достаточно подобрать такую прямую, проходящую через точку
(− 1 , j0) , чтобы вся кривая W*(jω) лежала справа от этой прямой. kн
|
|
|
V* |
|
|
|
V* |
1 |
|
|
− |
1 |
|
|
|
|
|
|
|
|
|||
− |
|
ω=∞ |
ω=0 U* |
|
kн |
ω=∞ |
ω=0 U* |
kн |
|
||||||
|
|
|
W*(jω) |
|
|
|
W*(jω) |
235
а |
а |
Рис. 29.5
Из рис.29.5,а следует, система абсолютно устойчива, а из рис.29.5,б видно в этом случае прямую подобрать нельзя и условие абсолютной устойчивости не выполняется.
236
Библиографический список
1.Бесекерский, В.А. Теория систем автоматического регулирования / В. А. Бесекерский, Е. П. Попов.– 4-е изд., перераб. и доп. М.: СПб Изд-во, «Профессия», 2004.- 747 с.
2.Востриков, А. С. Теория автоматического регулирования: Учеб. пособие для вузов/ А.С. Востриков, Г.А. Французова; Новосиб. гос. техн. ун-т. - Новосибирск: Изд-во НГТУ, 2003. - 363 с.
3.Певзнер, Л. Д. Практикум по теории автоматического управления: учеб. пособие для студентов вузов/ Л. Д. Певзнер. - М.: Высшая школа, 2006. - 590 с.
4.Никулин, Е. А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем: учеб. пособие для вузов. / Е. А. Никулин - СПб.: БХВ-
Петербург, 2004. - 631 с.
5.Мирошник, И. В. Теория автоматического управления. Линейные системы: Учеб. пособие для вузов/ И.В. Мирошник. - М.: Питер, 2005. - 333 с.
6.Ким, Д.П. Теория автоматического управления: учеб. пособие для студентов вузов/ Д. П. Ким. / - М.: Физматлит, 2003 - Т. 1: Линейные системы. - 2003. - 287 с.
7.Ерофеев, А. А.Теория автоматического управления: учебник для вузов/ А. А. Ерофеев. - 2-е изд., доп. и перераб. - СПб.: Политехника, 2005. - 302 с.
8.Солодовников В.В., Плотников В.Н., Яковлев А.В. Теория автоматического управления техническими системами: Учеб. пособие. -М.: Изд. МГТУ,1993.
9.Теория автоматического управления: Учеб. для вузов. В 2-х ч., ч.1,ч.2./ Под ред. А. А. Воронова- М.: Высш. шк., 1986.
10.Башарин, А.В., Новиков, В.А., Соколовский, Г.Г. Управление электроприводами. -Л.: Энергия, 1982.
11.Б. Куо. Теория и проектирование цифровых систем управления: Пер. с англ. - М.: Машиностроение, 1986.
12. Бесекерский, В.А., Изранцев, В.В. Системы автоматического управления с микроЭВМ. -М.: Наука, 1987.