

u_lectures
.pdf143
где b(p) и c(p) – характеристические полиномы соответственного контура
регулирования, определенного матрицей А-ВК и контура оценки состояния, определенного матрицей A-LC
b(p)= det[pI - (A - BK)], c(p)= det[pI - (A - LC)].
Таким образом, динамика замкнутой системы в целом определяется динамическим поведением контура регулирования и контура оценки состояния. Однако их динамика может быть выбрана независимо и не влияет друг на друга. Если оба полинома устойчивы, то их произведение – также устойчивый полином.
МОДУЛЬ 2. ДИСКРЕТНЫЕ СИСТЕМЫ АВТОМАТИЧЕКОГО УПРАВЛЕНИЯ
РАЗДЕЛ 3. ЛИНЕЙНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ
16. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ИМПУЛЬСНЫХ СИСТЕМ
16.1. Определение линейных импульсных систем
Импульсными системами автоматического регулирования называются системы, содержащие импульсное звено, то есть звено, преобразующее непрерывное входное воздействие x(t) в последовательность импульсовxи (t) .
u(t) |
|
x |
ИЗ |
xи |
|
|
y |
|
|
|
|
|
|
|
|
|
- |
|
|
|
Управляем |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Рис. 16.1. Импульсная система

144
Различают также цифровые системы. В цифровой системе сигналы в одной или нескольких точках представляются цифровыми кодами, с которыми оперирует ЭВМ.
Цифровой. |
|
|
|
|
|
y |
код |
ЭВМ |
ЦАП |
|
|
||
|
|
|
|
|||
Управляем
АЦП
Рис. 16.2. Цифровая система
Дискретные системы объединяют все системы, в которых сигналы имеют цифровую или импульсную форму.
Дискретные
системы
Импульсные |
|
Цифровые |
(квантование по времени) |
|
(квантование по уровню и времени) |
|
|
|
|
Рис. 16.3 |
|
Области применения импульсных систем широки и в основном эти системы могут быть разделены на две группы:
1) Системы, где информация существует лишь в моменты съема (или измерения):
•радиолокационные системы;
•системы передачи данных, обслуживающие одновременно несколько систем управления;
•системы управления с цифровыми вычислительными устройствами. 2) Системы, в которых информация намеренно вводится только в
дискретные моменты времени, хотя она существует непрерывно.
То есть квантование вводится специально в следующих случаях:
•когда систему с квантованием можно сделать более точной за счет отсутствия нагрузки между моментами съема данных;
•когда система управления позволяет поочередно решать несколько задач управления;
•при управлении процессами, где благодаря квантованию достигается более экономичное использование приборов, измеряющих температуру, давление, расход.

145
Особенно большое развитие получили ИС в последние годы, когда в САУ начали использовать цифровые вычислительные машины и цифровые устройства.
|
x2 |
Регулятор |
|
|
Объект |
y2 |
|
- |
|
|
|
2 |
|
x1 |
|
|
|
|
y1 |
|
АЦП |
ЦВМ |
ЦАП |
|
Объект |
||
|
|
|||||
|
- |
|
|
|
1 |
|
x,3 |
|
|
|
|
y3 |
|
|
|
|
|
Объект |
||
- |
Коммутатор |
|
|
Коммутатор |
3 |
|
|
|
|
|
Рис. 16.4. Пример импульсной системы с ЦВМ
Подобная структура (рис. 16.4) часто встречается в системах АСУ ТП. Импульсное звено может быть представлено в виде
x(t) |
xи(t) |
|
x(t) |
xи(t) |
|
|
И |
|
t |
0 |
t |
|
T |
2 |
Рис. 16. 5
ИЗ представляет собой преобразователь или импульсный модулятор, который преобразует входную функцию x(t) в последовательность импульсов, промодулированных по амплитуде, длительности или частоте.
16.2.Виды модуляции сигналов
16.2.1.Общее понятие амплитудной модуляции сигналов
Амплитудной модуляции соответствует схема
x(t) |
f (t) |
x и ( t ) |
АИ |
||
|
модулятор |
|
|
|
|
Рис. 16.6
Выходной модулированный амплитудный сигнал xи (t) определяется выражением:
148
Рис. 16.10
Звено с ШИМ описывается следующими уравнениями:
xИ =С sign x[lT] при lT ≤ t ≤ (lT + γT)
xИ = 0 при (lT + γT) < t < (l + 1)T γ = k /x[lT]/; l = 0,1,2,3,…; С= const.
Если длительность импульсов невелика по сравнению с длительностью переходных процессов в системе, то системы с широтной модуляцией импульсов приближаются по своим свойствам к системам с амплитудной модуляцией и могут быть описаны линейными уравнениями.
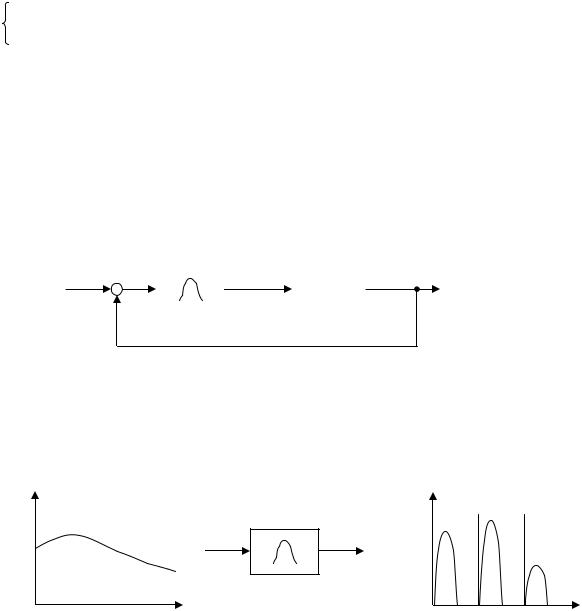
16.3. Эквивалентная схема импульсной системы
Структурная схема импульсной САУ имеет вид (рис. 16.11).
xвх |
x |
|
xИ |
НЧ |
xвых |
|
WН(p) |
||||
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 16.11
Система содержит ИЗ и непрерывную часть с передаточной функцией WН(p). На вход ИЗ подается непрерывная величина, на выходе получаем последовательность импульсов.
x(t) |
ИЗ |
xи(t) |
|
|
x(t) xи(t)
t |
0 |
T |
2T |
t |

149
Рис. 16.12
Форма импульсов произвольна и зависит от конкретной реализации звена. Она характеризуется функцией f(t), равной нулю вне интервала
0 < t ≤ T. f(t)
0 |
T |
t |
|
Рис. 16.13 |
|
Для периода 0 ≤ t < ∞ импульсный сигнал
∞
xи(t) = ∑x(lT ) f (t −lT ) .
l =0
Для расчета заменим реальное ИЗ – идеальным (простейшим) импульсным звеном (ИИЗ) и формирующим звеном (ФЗ), которые соединяются последовательно (рис. 16.14).
|
ИИЗ |
x*(t) |
ФЗ |
|
|
x(t) |
|
xИ(t) |
|||
Wф(p) |
|||||
|
|
|
|
||
|
|
|
|
|
Рис. 16.14
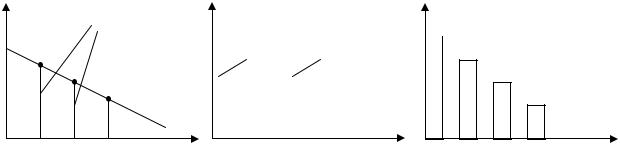
Сигналы в схеме на рис.16.14 имеют вид (рис. 16.15).
ИИЗ преобразует x(t) в x*(t), который представляет собой последовательность мгновенных импульсов с амплитудой равной ∞ и периодом Т, причем площадь каждого импульса равна значению x(t) в момент lT.
x(t) |
x*(t) |
xИ(t) |
а |
t |
T 2T б3T 4T |
t |
в |
t |
|
|
Рис. 16.15 |
|
|
|

150
При t = lT следует x*(lT) = x(lT)*δ(0), то есть амплитуда→∞, поэтому изображение x*(t) условное и импульсы (рис. 16.15,б) изображаются разной длины условно пропорциональной их площади.
Допустим, что при t< 0 , x(t) = 0. Тогда последовательность импульсов x*(t) может быть записана:
∞
x*(t) = ∑x(lT )δ(t −lT ),
l =0
где x(lT) – значение входного сигнала в момент времени lT, δ(t) –
′ |
∞ |
|
∫δ (t)dt =1; функция δ(t) равна |
||
дельта-функция со свойствами: δ(t) =1 (t) ); |
||
|
−∞ |
нулю везде, кроме точки t = 0.
На входе формирующего звена в момент времени t = lT действует импульс x*(t), площадь которого равна x(lT)×1.
Формирующее звено должно иметь реакцию на единичный импульс (то есть весовую функцию), тождественную форме действующих в системе импульсов
wф(t) = f (t)
Для этого передаточная функция ФЗ должна быть равна изображению функции f(t), так как изображением единичного импульса является единица, то есть
Wф( p) = F( p) .
Таким образом, передаточная функция ФЗ Wф(p) зависит от формы импульса на выходе реального ИЗ и определяется по выражению:
∞ |
∞ |
|
Wф(p)= ∫wф(t)e− pt dt =∫ |
f (t)e− pt dt . |
|
0 |
0 |
|
Для распространенного |
случая, когда формируются импульсы |
|
прямоугольной формы (длительности γT), передаточная функция формирователя имеет вид:
Wф(p) = 1 − e−γTp . p
Если γ =1, то
Wф(p) = 1 − e− pT . p
Такой формирователь называют фиксатором нулевого порядка и он преобразует импульсный сигнал в ступенчатый.
Следовательно, выходной сигнал формирующего звена будет иметь вид последовательности импульсов с формой f(t), то есть
151
∞
xи(t) = ∑x(lT )wф(t −lT ).
l=0
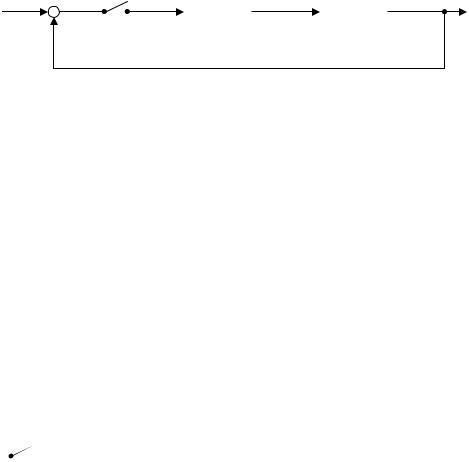
Сучетом этого получим эквивалентную схему импульсной системы.
ИИЗ
xвх |
x |
x* |
|
xИ |
|
xвых |
|
Wф(p) |
WН(p) |
||||||
|
|
|
|
|
|||
|
– |
|
|
|
|
|
Рис. 16.16
ФЗ и непрерывная часть соединены последовательно и образуют приведенную НЧ с передаточной функцией
Wфн(p) = Wф(p) Wн(p).
Важной особенностью ИС является недопустимость перемещения ИЗ через непрерывное звено в структурных схемах.
16.4. Применение преобразований Фурье и Лапласа для дискретных сигналов
Рассмотрим идеальное импульсное звено (рис. 6.17).
Пусть при t< 0 , x(t) = 0, тогда сигнал x*(t) равен сумме модулированных и смещенных единичных импульсных функций
|
x |
|
ИИЗ x* |
|
∞ |
|
|
|
|
|
|
|
|
x*(t) = |
∑x(lT )δ(t −lT ). |
(16.1) |
|
|
|
|
|
|
||||
|
|
Рис.16.17 |
l =0 |
|
|
|||
|
|
|
|
|
|
|||
|
|
Изображение последовательности x*(t) определяется формулой |
||||||
прямого преобразования Лапласа |
|
|
||||||
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
X*(p) = |
∫x*(t)e− pt dt . |
(16.2) |
|
|
|
|
|
|
|
0 |
|
|
|
|
Подставив (16.1) в (16.2) и изменив порядок выполнения операций, |
||||||
получим |
|
∞ |
∞ |
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
X*(p) = |
∑ |
∫ x(lT )δ(t − lT )e− pt dt . |
(16.3) |
|
|
|
|
|
|
l =00 |
|
|
Интеграл будет равен
∞
∫ x(lT )δ(t − lT )e− pt dt = x(lT) e-plT
0

152
Здесь учитывается, что подынтегральное выражение всюду равно нулю, за исключением моментов времени t = lT и интеграл от импульсной функции равен 1 по определению. Тогда
∞ |
|
X*(p) = ∑x(lT )e− plT |
(16.4) |
l =0 |
|
Выражение (16.4) называют дискретным преобразованием Лапласа. |
|
Изображение X*(p) соответствует трансцендентной функции от p, |
|
поэтому целесообразно произвести замену переменной: |
|
epT = z. |
(16.5) |
Тогда (16.4) примет вид |
|
∞ |
|
X(z) = ∑ x(lT )z−l . |
(16.6) |
l =0
Выражение (16.6) называют z-преобразованием дискретного сигнала.
Преобразование Фурье для сигнала x*(t) имеет вид:
∞ |
|
X*(jω) = ∫ x*(t)e− jωt dt |
(16.7) |
0 |
|
Аналогичным способом можно получить дискретное преобразование Фурье:
∞ |
|
X*( jω) = ∑x(lT )e− jωlT , |
(16.8) |
l=0
где X*( jω) – изображение Фурье или спектр.
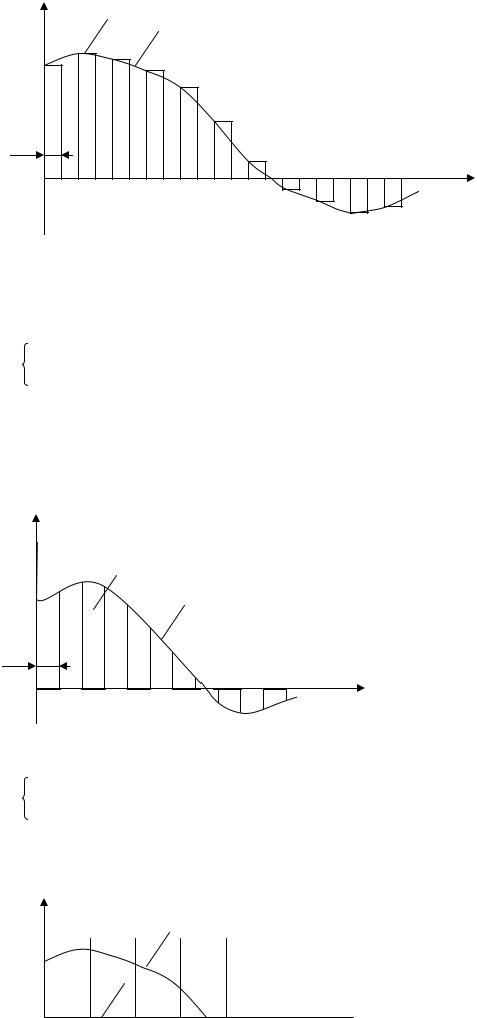
Важной особенностью спектра дискретного сигнала является его периодичность по оси частот с периодом
ωИ = 2Tπ .
Это вытекает из (16.8)
e− j(ω+rωи )lT = e− jωlT e− jrl 2π = e− jωlT ,
где r = 0, 1, 2,…
Пример 1.
Сигнал x(t) представляет собой единичную функцию, то есть x(t) = 1(t). Тогда дискретная функция имеет вид
∞
x*(t) = ∑1 δ(t − lT )
l=0
Изображение