

u_lectures
.pdf
|
|
|
|
|
|
223 |
|
|
≈ |
|
|
|
|
W |
(a) = |
X 2 |
|
|
(27.15) |
|
≈ |
|
|
||||
Н |
|
|
|
|||
|
|
X 1 |
|
|
|
|
|
|
|
|
≈ |
|
|
W |
( jω) = − |
|
X 1 |
, |
(27.16) |
|
|
≈ |
|||||
Л |
|
|
|
|
|
|
|
|
|
|
X 2 |
|
|
≈≈
где X 2 и X 1 - изображения Фурье для синусоидальных сигналов. Перемножим (27.15) и (27.16) и получим
WH (a)WЛ ( jω) =WР(a, jω) = −1, |
(27.17) |
при ω = ωП , a = aП .
Выражение (27.17) представляет необходимое условие для существования автоколебаний в системе и называется условием гармонического баланса.
Уравнение (27.17) согласуется с условием нахождения линейной системы на границе устойчивости. По критерию Найквиста в линейной системе будут автоколебания, если годограф WР(jω) пройдет через точку (–1, j0),то есть при некоторой частоте ω = ωп, WР(jωп) = –1.
Основные задачи, решаемые с помощью метода гармонической линеаризации, это исследование автоколебательного режима в заданной нелинейной системе и определение условий отсутствия этого режима.
27.5.Графоаналитический метод определения параметров автоколебательного режима и его устойчивости
Практически пользоваться выражением (27.17) неудобно, так как требуется подобрать два параметра, поэтому задачу решают графически.
Для этого запишем (27.17) следующим образом
WЛ ( jω) = − |
1 |
= −M Н (a), |
(27.18) |
|
WН (a) |
||||
|
|
|
где: –MН(a) – обратный комплексный коэффициент передачи НЗ, который равен
− M Н (a) = − |
1 |
|
. |
(27.19) |
q(a) + |
′ |
|||
|
jq (a) |
|
|
Уравнение (27.18) можно решить графически. Для этого нужно построить на комплексной плоскости годографы линейной части системы

225
Пусть весь годограф нелинейного звена лежит в области D0, то есть
условие (27.20) не выполняется, так как Aл(ω) <1, значит |Wp(a, jω)| < 1 и в
Aм(а)
соответствии с критерием Найквиста система устойчива и в ней будут затухающие колебания.
Аналогично можно показать, что если весь годограф –Mн(а) лежит в области D1, то система будет неустойчива и в ней будут существовать расходящиеся колебания.
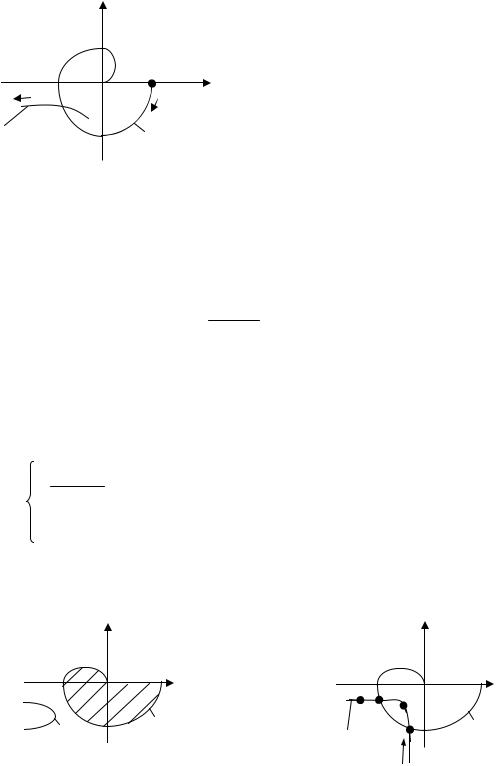
Если годографы пересекаются (рис. 27.15) , то в системе возможны автоколебания в точках 1 и 2. Определим, где автоколебания устойчивы?
В точке 1– амплитуда – ап; в точке 1`– амплитуда – (ап + ∆a); в точке 1``– амплитуда – ( ап – ∆a).
Пусть существуют автоколебания в точке 1 с параметрами ап и ωп. Допустим, произошло увеличение амплитуды ап + ∆a (точка 1`). Рабочая точка находится в области D0, то есть система устойчива и амплитуда колебаний уменьшится до ап.
Пусть амплитуда колебаний уменьшается, то есть ап – ∆a (точка 1``). Рабочая точка находится в области D1, то есть система неустойчива и амплитуда колебания возрастет до ап.
Следовательно, точка 1 соответствует устойчивому предельному циклу.
Рассмотрим точку 2.
Пусть а понижается, то есть ап – ∆a. В этом случае система устойчива и колебания затухающие. Следовательно, точка 2 соответствует неустойчивому предельному циклу.
На основе проведенного анализа сформулируем правило определения устойчивости автоколебаний: автоколебания устойчивы, если годограф
WЛ(jω) не охватывает точку на годографе |
–MH(a), |
в которой a = aп + a, |
|||||||||||
a > 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример. Метод гармонического баланса. |
k=10c-1 |
||||||||||||
xвх=0 |
x1 |
|
|
|
|
|
|
x2 |
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
b=0.5, |
||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
К/Р |
|
|
вых |
|
– |
|
|
|
|
|
|
|
|
|
|
|
c=10. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 27.16
Определить, возможны ли автоколебания и если возможны, то найти их параметры.
Комплексный коэффициент передачи нелинейного звена будет равен
Wн(а)=q(a)+jq`(a),
где

228
называется функцией Ляпунова, если в качестве переменных
x1 , x2 ,..., xn взяты переменные системы (28.1). |
|
|
||||||||||||||||||||||
Производная по времени функции Ляпунова имеет вид |
|
|||||||||||||||||||||||
|
dV |
= |
∂V |
dx1 |
+ |
∂V |
dx2 |
+... + |
|
∂V |
dxn |
|
(28.4) |
|||||||||||
|
dt |
∂x |
|
|
|
∂x |
|
|
||||||||||||||||
|
|
|
dt |
|
|
|
∂x |
2 |
|
dt |
|
|
|
n |
dt |
|
|
|||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
dxi |
|
|
|
||||||
Подставим в (28.4) выражения |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
||
|
dV |
= |
∂V |
F + |
∂V |
|
F +... + |
∂V |
|
F |
|
(28.5) |
||||||||||||
|
dt |
∂x |
|
|
|
|
||||||||||||||||||
|
|
|
1 |
|
|
∂x |
2 |
|
|
2 |
|
∂x |
n |
|
n |
|
|
|||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
dV |
=W (x , x |
2 |
,..., x |
n |
) |
|
|
|
|
|
|
|
|
|
|
(28.6) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
dt |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
dV |
|
|
|
|
|
|
|
|
|
|
|
||
Таким |
образом, |
|
|
– |
является |
функцией отклонений. |
Причем, |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
W = 0 при x1 = x2 =... = xn = 0. |
|
|
|||||||||
согласно |
|
свойства |
|
(28.2), |
Поэтому |
к этой |
||||||||||||||||||
функции можно применить понятие знакоопределенной, |
знакопостоянной и |
|||||||||||||||||||||||
знакопеременной функции. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Теорема Ляпунова. Если при |
|
|
заданных в форме |
(28.1) уравнениях |
||||||||||||||||||||
нелинейной системы n-го порядка можно подобрать такую знакоопределенную функцию V =V (x1, x2 ,...., xn ) , чтобы её производная по
времени W (x1, x2 ,..., xn ) |
|
|
|
|
также |
была |
знакоопределенной |
или |
||||||||||||||
знакопостоянной, но имела знак, противоположный знаку функции V, то |
||||||||||||||||||||||
данная система устойчива. |
|
|
|
|||||||||||||||||||
Пример. Пусть задана нелинейная САУ, которая описывается системой |
||||||||||||||||||||||
уравнений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
dx1 |
|
|
= F (x |
, x |
2 |
, x |
3 |
) |
|
|
|
||||||||||
|
|
|
|
|
||||||||||||||||||
|
dt |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
dx2 |
= F |
(x |
|
, x |
2 |
|
, x |
3 |
) |
|
|
(28.7) |
|||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
dt |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
dx3 |
= F (x , x |
2 |
, x |
3 |
) |
|
|
|
|||||||||||||
|
|
|
|
|
||||||||||||||||||
|
dt |
3 |
1 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Выберем Функцию Ляпунова в виде: |
|
|
|||||||||||||||||||
|
V = а2 x2 |
+b2 x2 |
+ c2 x2 |
|
|
(28.8) |
||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
V > 0 при любых xi,
а,b,c - произвольные вещественные числа.
Будем придавать этой функции постоянные значения 0,С1,С2,…., причем 0<С1<С2… Тогда получим

|
|
|
|
|
229 |
V = а2 x2 |
+b2 x2 |
+ c2 x2 |
= 0, |
|
|
1 |
2 |
3 |
|
|
|
V = а2 x2 |
+b2 x2 |
+ c2 x2 |
= C , |
(28.9) |
|
1 |
2 |
3 |
1 |
|
|
V = а2 x2 |
+b2 x2 |
+ c2 x2 |
= C |
. |
|
1 |
2 |
3 |
2 |
|
|
Х3
MС2 С1
Х2
Х1x1
Рис. 28.1
|
Возьмем производную от V по времени |
|
|
|
|
|
|
|||||||||||
dV = 2a2 x F (x , x , x ) + 2b2 x F (x , x , x ) + 2c2 x F (x , x , x ) |
(28.10) |
|||||||||||||||||
dt |
1 |
1 |
|
1 |
2 |
3 |
2 |
2 |
1 |
2 |
3 |
3 |
3 |
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если полученная функция W (x1, x2 ,..., xn ) является знакоопределенной |
|||||||||||||||||
отрицательной, то есть |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
W = |
dV |
|
< 0, |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
то V убывает во всех точках пространства, кроме начала координат, |
|
|||||||||||||||||
V |
|
|
|
|
|
|
|
|
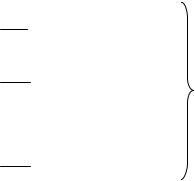
Таким образом, при любых начальных |
|||||||||
|
|
|
|
|
|
|
условиях изображающая точка M будет двигаться в |
|||||||||||
|
|
|
|
|
|
|
|
сторону уменьшения функции V, то есть будет |
||||||||||
|
|
|
|
|
|
|
|
пересекать эллипсоиды и стремиться к началу |
||||||||||
|
|
|
|
|
|
|
|
координат. А это означает, что все отклонения |
||||||||||
|
|
|
|
|
|
|
t |
системы x1 ,x2 ,x3 уменьшаются, то есть |
система |
|||||||||
|
Рис. 28.2 |
|
|
устойчива. |
|
|
|
|
|
|
|
|
|
|||||
При практическом применении метода наибольшую трудность вызывает подбор функции V, так как эта задача неоднозначна и не существует формальных методов нахождения V, поэтому приходится полагаться на опыт и интуицию.
Однако, несмотря на это, метод применяется не только для исследования нелинейных систем, но и при анализе и синтезе адаптивных законов управления. Адаптивные системы управления относятся к классу нелинейных систем.
28.3. Формулировка теоремы Ляпунова в векторно-матричной форме
230
В общем случае, если используется математическое описание САУ в форме уравнений состояния, то функция Ляпунова часто имеет вид квадратичной формы, которая включает в себя члены второй степени по xi и xj
n |
n |
|
V (x1, x2 ,....xn ) = ∑∑pij xi xj , |
(28.11) |
|
i=1 |
j=1 |
|
где: x - вектор состояния, pi,j – коэффициенты.
В векторно-матричной форме
V (x , x |
,..., x |
n |
) = xT Px |
(28.12) |
1 2 |
|
|
|
где xT – вектор-строка, полученная транспонированием вектора x;
P- квадратная определенно положительная симметрическая матрица типа n×n, элементы которой постоянны, причем P = PT .
Критерий Сильвестра.
Квадратичная форма (28.12) положительно определенная, если все “n” определителей |P1|,|P2|,…,|Pn| - положительны.
Пример :
V (x , x |
|
) = [x x |
|
] p11 |
p12 |
x1 |
|
= [x x |
] p11x1 + p12 x2 |
|
= p x2 |
+ p x x |
|
||||
1 |
2 |
1 |
2 |
p |
p |
22 |
x |
2 |
|
1 |
2 p x |
+ p x |
2 |
|
11 1 |
12 1 |
2 |
|
|
|
|
21 |
|
|
|
|
21 1 |
22 |
|
|
|
|
|||
+ p12 x1x2 + p22 x22 = p11x12 + p22 x12 + 2 p12 x1x2
так как р12 = р21.
Определение устойчивости линейной системы.
Дифференцирование функции Ляпунова в виде (28.12).
Пусть имеем линейную автономную систему, которая описывается уравнением состояния
x = Ax |
|
|
|
|
|
|
|
|
|
|
|
(28.13) |
||
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда сопряженная система будет иметь вид |
|
|
|
|||||||||||
&T |
= x |
T |
A |
T |
|
|
|
|
|
|
|
|
(28.14) |
|
x |
|
|
|
|
|
|
|
|
|
|
||||
Пусть V( x )=xTPx |
- функция Ляпунова. |
|
|
|||||||||||
Тогда найдем производную функции Ляпунова по времени |
|
|||||||||||||
& |
|
|
T |
Px + x |
T |
Px = x |
T T |
T |
PAx = x |
T |
T |
(28.15) |
||
V (x) = x |
|
|
A Px + x |
|
|
(A P + PA)x |
||||||||
|
|
& |
|
|
|
|
|
& |
|
|
|
|
|
|
|
Введем обозначение AT P +PA= - Q. |
|
|
( 28.16) |
||||||||||
Тогда если матрица Q положительно определена, то система (28.13) асимптотически устойчива, так как
231
W =V&(x) = −xT Qx < 0 |
(28.17) |
Эти результаты применяют при синтезе адаптивных систем управления, которые обычно содержат в своем составе как линейные, так и нелинейные части.
29.УСЛОВИЯ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ
НЕЛИНЕЙНЫХ СИСТЕМ
29.1. Понятие абсолютной устойчивости
Пусть имеем нелинейную систему с одной нелинейной функцией
x2=F(x1) |
(29.1) |
||
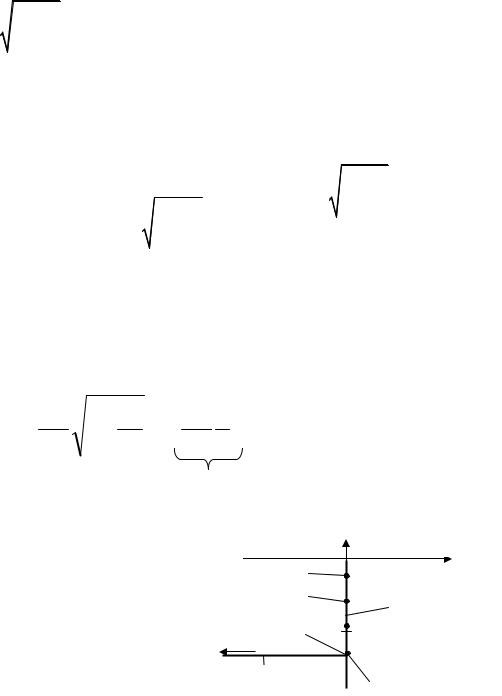
Пусть на характеристику НЗ наложены ограничения |
|
||
0 ≤ |
F(x1 ) |
< kн |
(29.2) |
|
|||
|
x1 |
|
|
232
Условие (29.2) графически изображено на рис. 29.1 и показывает, что нелинейная функция должна находиться внутри заштрихованного сектора. Примером такой функции могут служить характеристики АЦП и ЦАП.
x2 |
F(x1) |
Условие |
абсолютной |
|
устойчивости гласит, что при любой |
||
|
|
||
|
аrctg kн |
нелинейности, |
удовлетворяющей |
|
|
ограничению (29.2), нелинейная |
|
|
x1 |
система будет устойчива. |
|
Рис. 29.1
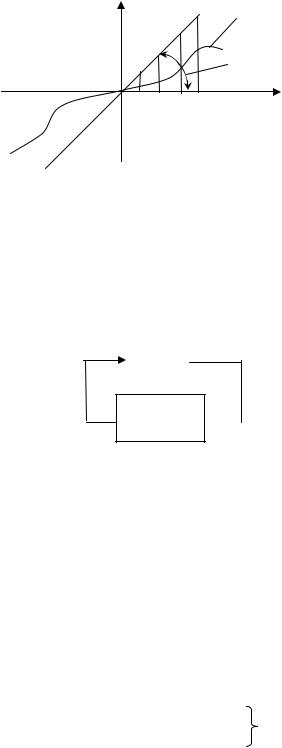
29.2. Частотный критерий абсолютной устойчивости В. М. Попова
Пусть нелинейная система содержит однозначную нелинейность и в ней выделены линейная часть и нелинейное звено (рис. 29.2).
x1 |
|
x2 |
|
F(x1) |
|||
|
|
||
|
|
|
Линейная часть 
Рис. 29.2
НЗ описывается уравнением (29.1) и удовлетворяет ограничениям
(29.2).
Пусть линейная часть имеет передаточную функцию (29.3) и
описывается уравнением (29.4): |
|
||||||
W ( p) = |
X1 |
( p) |
= − |
R( p) |
|
(29.3) |
|
X2 |
( p) |
Q( p) |
|||||
|
|
|
|||||
Q( p)X1 ( p) = −R( p)X2 ( p), |
(29.4) |
||||||
где Q(p) и R(p) – полиномы степени n и m |
|
|
Q(p)=a0pn + a1pn-1 +…+ an |
(29.5) |
|
R(p)=b0pm + b1pm-1 +…+ bm |
||
|
На линейную часть накладываются следующие ограничения: Характеристическое уравнение линейной части Q(p) = 0 имеет все
простые корни с отрицательной вещественной частью и не более двух