

u_lectures
.pdf123
ω0 = 9.5 = 9.5 = 47.5c-1. tn 0.2
Структура модального регулятора задается всегда одинаковой и представляет собой обратную связь по всем переменным состояния. Регулятор линейно преобразует поступившие сигналы, т.е. усиливает и суммирует эти сигналы хi и выдает в качестве выхода их линейную комбинацию.
Пусть исходная линейная система описывается уравнением состояния:
x= Ax+ Bu . |
(12.1) |
& |
|
Для получения желаемого быстродействия и характеристического уравнения системы введем линейную обратную связь по переменным состояния в соответствии с уравнением
u=v - Kx ,
(12.2)
где v - новое обозначение вектора входных воздействий;
u - вектор управляющих воздействий с выхода регулятора;
К - матрица обратной связи.
Если u и v скаляры, то К является матрицей-строкой, элементы которой – есть коэффициенты обратных связей по всем составляющим вектора х.
K = K1 K2…Kn .
124
Исходная система и линейная обратная связь по переменным состояния образуют замкнутую систему:
V1 |
|
V |
u исходная схема |
x1 |
|
|
K |
− |
|
x = A x + B u |
x2 |
|
1 |
|
|
& |
xn |
|
|
|
|
|
|
|
|
|
|
|
|
+
K1
K2
Kn
модальный регулятор
Рис. 12.2. Структурная схема
125
Подставляя (12.2) в (12.1), получим ее уравнение:
x = Ax + B(v - Kx)= (A - BK)x + Bv. |
(12.3) |
& |
|
Динамические свойства полученной системы согласно (12.3) определяются
матрицей системы |
~ |
A =А-ВК. Необходимо найти такую матрицу |
коэффициентов обратной связи К, чтобы замкнутая система имела желаемый
характеристический полином Dж(р), для этого определитель матрицы |
|
~ |
должен быть равен Dж(р): |
pI − A |
|
det(pI - A% )= D (p), |
(12.4) |
ж |
|
где I– единичная матрица.
Из (12.4), приравнивая коэффициенты при р в одинаковых степенях, можно найти элементы матрицы К.
Пример. Провести синтез модального регулятора для системы, представленной на рис. 12.3, где коэффициенты К1 и К2 соответствуют модальному регулятору. Составим уравнения состояния для исходной системы управления. Вначале запишем дифференциальные уравнения для интегрирующих звеньев, затем подставим значения входных величин и получим уравнения состояния.
v |
u |
|
xвх2 |
|
x2 |
xвх1 |
|
x |
|
|
a |
||||||
|
a |
|||||||
|
|
|
|
|
|
1 |
1 |
|
|
− |
− |
|
2 |
|
|
p |
|
− |
|
p |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 K1
 +
+
126
Рис. 12.3
Запишем уравнения состояния для системы.
x&1 = xвх1 × a1 ;x&2 = xвх2 × a2
xвх1 = x2 ;
xвх2 = u - x1 - x2 ;
x = a x |
|
|
|
|
|
|
||
& |
|
|
|
|
|
|
|
|
&1 |
|
1 |
2 |
|
|
|
; |
|
x2 = -a2 x1 - a2 x2 + a2u |
|
|
||||||
A= |
|
0 |
a1 |
|
; |
|
0 |
|
-a |
-a |
|
B = |
. |
||||
|
|
|
a2 |
|
||||
|
|
2 |
2 |
|
|
|
|
|
Матрица искомых коэффициентов обратных связей по переменным состояния имеет вид:
K = [K1 K2 ].
Найдем матрицу
% |
|
|
0 |
a1 0 |
K2 ]= |
0 |
a1 |
0 |
0 |
|
|
A= A - BK = |
-a2 |
-a2 - |
a2 ×[K1 |
-a2 |
-a2 |
- K1a2 |
K2a2 |
= |
|||
|
|
0 |
|
a1 |
|
|
|
|
|
|
|
= |
-a2 |
(1+ K1 |
) -a2(1+ K |
. |
|
|
|
|
|
|
|
|
2 ) |
|
|
|
|
|
|
||||
Вычислим определитель матрицы pI − A% или характеристическое уравнение системы:

127
% |
|
|
|
p |
|
|
|
-a1 |
|
= |
|
|
|
|
|
|
|
|
|
||
det(pI - A)= |
(1+ K1 ) |
|
|
|
|
|||||
|
a2 |
|
p+ a2 (1+ K2 ) . |
|||||||
= p2 + pa (1+ K |
2 |
)+a a (1+ K |
1 |
) |
|
|
||||
|
2 |
|
1 |
2 |
|
|
|
|
||
Должно выполняться равенство:
det(pI - A)=% Dж(p)= p2 + 2ω0 p +ω02 ;
Приравниваем коэффициенты при р в одинаковой степени:
2ω0 = a2(1+ K2 )ω02 = a1a2 (1+ K1 ) ;
Решая систему, получим:
2ω
K2 = a20 - 1
ω2
K1 = a1a0 2 - 1
13.УПРАВЛЯЕМОСТЬ И НАБЛЮДАЕМОСТЬ САУ
3.1.Управляемость САУ
128
Синтез модального регулятора и существование матрицы К, придающей системе заданные динамические свойства может быть гарантирован в том случае, если существует принципиальная возможность управления вектором х с помощью вектора входных воздействий u.
Другими словами объект должен быть полностью управляем.
Определение: Линейная САУ, описываемая уравнением x&= Ax+ Bu , называется полностью управляемой, если она может быть переведена из
произвольного начального состояния |
x0 = x(t0 ) в произвольное |
конечное |
состояние x1 = x(t1 ) в течение конечного промежутка времени |
t1 - t0 при |
|
помощи ограниченного управления u(t), |
t0 < t < t1 . |
|
Для линейной стационарной системы, описываемой уравнением x&= Ax+ Bu , проверка управляемости осуществляется наиболее просто. Для этого необходимо составить так называемую матрицу управляемости
P = (B,AB,A2 B,....,An-1B).
Эта матрица имеет блочную структуру: ее элементами являются матрицы B, AB, A2B и т.д., каждая размером n × k , поэтому Р имеет n строк и kn столбцов.
Необходимым и достаточным условием полной управляемости системы является равенство ранга матрицы Р порядку системы:
rank P = n
Ранг матрицы – это наивысший порядок отличных от нуля миноров этой матрицы (т.е. всевозможных определителей, составленных из элементов, стоящих на пересечении выбранных строк и столбцов матрицы). Пример. Дан объект, рассмотренный в предыдущем примере, где матрицы равны:
A= 0 |
a1 ; |
B = |
0 . |
(a > 0,a |
|
> 0). |
|
-a2 |
-a2 |
a2 |
1 |
|
2 |
|
|
|
|
|
|
|
|
||
Определим матрицу управляемости. |
|
|
|
|
|||
Находим: |
a1a2 |
|
0 a1a2 |
|
|
||
|
|
|
|
||||
AB = -a22 ; |
P = (B,AB)= |
a2 |
-a22 |
|
|
||
Ранг матрицы Р равен |
двум, |
т.к. определитель |
2-го |
порядка det P ≠ 0 . |
|||
Следовательно, данный объект по входу u полностью управляем, а значит может быть построен модальный регулятор.
13.2. Наблюдаемость САУ
Возможность построения наблюдателя определяется следующим образом.
Система
129
x&(t)= Ax(t)+ Bu(t), y(t)= Cx(t)
называется наблюдаемой, если для всех t0 можно единственным образом определить x(t0) по данным измерения u(t) и y(t) на конечном интервале t0 < t < t1 .
Для линейной стационарной системы необходимым и достаточным условием полной наблюдаемости является условие
rank Q = n ,
где
Q = CT ,AT CT ,(AT )2 CT ,..,(AT )n-1 CT -
матрица наблюдаемости.
Пример. Определить наблюдаемость системы, рассмотренной в предыдущем примере и имеющей матрицы:
|
0 |
a |
|
; C = [1 0]; |
A= |
-a2 |
1 |
|
|
|
-a2 |
|
|
Составим матрицы |
|
0 -a2 |
|
|
1 |
0 |
|
||
T |
T |
|
|
|
|||||
A C |
|
= |
-a2 |
× |
|
= . |
|||
|
|
a1 |
|
0 |
a1 |
|
|||
Тогда матрица Q ,будет иметь вид |
1 |
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
Q = 0 |
a |
; |
|
|
|
||
|
|
|
|
|
1 |
|
|
|
|
Найдем ранг матрицы Q
rank Q = 2
Следовательно, система наблюдаема, и можно построить наблюдатель для идентификации вектора состояния системы.
14.ИДЕНТИФИКАЦИЯ ВЕКТОРА СОСТОЯНИЯ СИСТЕМЫ
14.1.Принципы построения наблюдающего устройства полного порядка
130
При синтезе модального регулятора предполагалось, что переменные состояния, по которым необходимо организовывать обратные связи, могут быть непосредственно измерены. Т.е. весь вектор состояния x измеряем. Однако в ряде случаев может оказаться целесообразным использовать обратную связь по переменной, непосредственное измерение которой затруднено или невозможно. Тогда возникает задача их искусственного воспроизведения с помощью специальных устройств, называемых «наблюдателями».
Для построения такого устройства необходимо, чтобы объект был наблюдаемым, т.е. существовала принципиальная возможность восстановить вектор неизмеряемых координат по вектору измеряемых координат. Существуют математические формулировки такой возможности. Физически они сводятся к тому, чтобы между измеряемой и неизмеряемой переменными существовала взаимосвязь.
Наблюдатель строится на основе известной структуры и параметров линейного объекта. Пусть объект (или система) n-го порядка, имеющий k входов и m измеряемых переменных состояния, описывается уравнением состояния
x = Ax + Bu |
|
||
& |
|
(14.1) |
|
y = Cx |
|||
|
|||
Можно создать аналоговую или цифровую модель объекта, которая |
|||
должна удовлетворять уравнению |
|
||
ˆ |
= Axˆ+ Bu |
|
|
x& |
(14.2) |
||
yˆ |
= Cxˆ |
||
|
|
|
|
В уравнении (14.2) в отличие от (14.1) фигурирует не реальный, а |
|||
восстановленный вектор состояний xˆ |
(т.е. оценка), yˆ - восстановленный |
||
вектор выходных величин. |
Вектор xˆ |
по постановке задачи, должен быть |
|
равен х и может быть измерен, т.к. это величины модели. Вектор входных воздействий “u” должен одновременно прикладываться и к реальному объекту и к модели.
Однако из-за неточного математического описания объекта и возмущений, действующих только на объект, равенство x = xˆ нарушается, и выходные переменные модели не будут соответствовать переменным объекта. Для уменьшения этого расхождения на вход модели вводят сигналы ошибок воспроизведения переменных объекта, образующих вектор y, которые доступны измерению (т.е. используется принцип обратной связи).
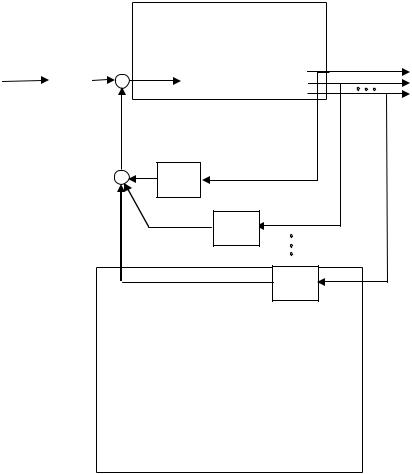
Структурная матричная схема системы тогда будет иметь вид на рис. 14.1.

131
u |
|
|
|
|
x& |
|
|
|
1 |
|
Ι |
|
x |
|
|
y |
|||
|
|
|
|
|
|
||||||||||||||
|
В |
|
|
|
С |
||||||||||||||
|
|
|
|
|
|
|
|
p |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
объект |
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
y |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
y |
||||
|
|
В |
|
|
x |
|
|
|
|
|
|
|
Ι |
|
xˆ |
|
-С |
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
наблюдатель |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 14.1. Структурная матричная схема
Вектор ошибки восстановления измеряемых переменных
размерности m вводится на входы наблюдателя через матрицу коэффициентов L наблюдателя:
L11 |
. . |
L1m |
L= . |
. . |
. |
. |
. . |
. |
Ln1 |
. . Lnm |
|
|
|
|
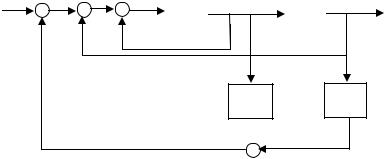
Схему наблюдателя можно преобразовать (рис. 14.2).
y
L
|
|
|
|
ˆ |
|
|
−LC |
|
|||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
x |
|
|
|
|
|
|
|
|
|
B |
|
& |
|
|
1 |
|
|
xˆ |
|
|
|
|
|
|
|
I |
|
|
|||
|
|
|
|||||||||
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||||
y% = y - yˆ
(14.3)
132
Рис. 14.2. Преобразованная структурная матричная схема
Собственная динамика наблюдателя как замкнутой системы зависит от матрицы L. На основании схемы можно записать
ˆ |
= (A - LC)x+ˆ Bu + Ly . |
(14.4) |
x& |
Или перейдя к изображениям
|
|
[pI -(A - LC)] X = BU + LY |
|
(14.5) |
||
где I - единичная матрица. |
L |
|
|
|
||
Выбор |
элементов |
матрицы |
означает |
определение |
вида |
|
характеристического уравнения наблюдателя, т.е. |
|
|
||||
|
det pI -(A- LC) =0 . |
|
|
|
(14.6) |
|
|
|
|
|
|
|
|
Выражение (14.6) приравнивают к выражению желаемого полинома, например, в форме Баттерворта, т.е.
det pI -(A- LC) |
= D (p) |
(14.7) |
|
|
|
ж |
|
Из (14.7), приравнивая коэффициенты при р в одинаковой степени, можно определить требуемые коэффициенты связей наблюдателя, т.е. элементы матрицы L. Частотуω0 , определяющую быстродействие
наблюдателя, необходимо выбрать так, чтобы быстродействие наблюдателя в 2-3 раза превышало быстродействие системы.
Решая совместно уравнения (14.1) и (14.4) можно получить путем вычета уравнения (14.1) из (14.4):
ˆ |
- x&=(A - LC)xˆ + Bu + Ly - Ax - Bu , |
x& |
т.к. Ly= LCx, тогда