

u_lectures
.pdf93
2. Среднечастотный участок располагается по обе стороны от точки пересечения характеристикой оси частот. Точка пересечения соответствует частоте среза ωC . Среднечастотный участок должен обязательно иметь
наклон –20 дБ/дек и продолжаться от ωC до ординат L1 и L2 . 2.1. Определение ωC .
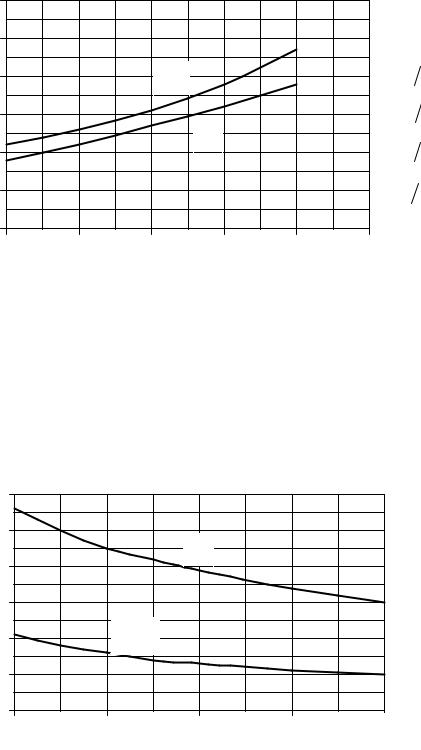
Для этого используют зависимости, приведенные на рис. 9.8.
По заданному значению σ % определяется максимальная ордината вещественной частотной характеристики Pмакс , затем, используя Pмакс ,
находится ордината tР = π n , откуда с учетом заданного значения tР
ωс
находим частоту среза:
π n
ωс = tР . (9.15)
2.2.Определяется минимальное значение типовой вещественной
характеристики из соотношения Pмин = 1 − Pмакс < 0 .
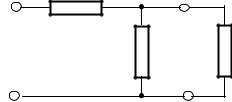
2.3. Определение запасов устойчивости по амплитуде L1 и L2 .
Запасы устойчивости находятся по графикам, приведенным на рис. 9.9. Кривые на рисунке представляют собой зависимости запаса устойчивости по
амплитуде L1 и запаса устойчивости по фазе γ от величины Pмакс . |
Pмакс . |
|
Чтобы определить |
L1 , находим на графике значение равное |
|
Проведя вертикальную |
прямую вверх до пересечения с |
кривой |
L1 = f ( Pмакс ), а затем горизонтальную прямую до оси ординат, находим
величину L1 дБ. Величину L2 определяем из условия |
L2 = – L1 . |
||
Аналогичным образом, используя кривую γ = f ( Pмакс ), |
найдем значение |
||
запаса устойчивости по фазе |
γ . |
|
|
3. Высокочастотный |
участок очень мало влияет |
на |
переходный |
процесс и строится прямыми с наклоном –40 или –60 дБ/дек или с наклоном меньшим на 20 дБ/дек, чем ЛАЧХ нескорректированной системы на этом участке.
4. Среднечастотный участок сопрягается с соседними либо непосредственно путем продолжения СЧ участка (например, на рис. 9.7), либо с помощью сопрягающих прямых, имеющих наклон –40 или –60 дБ/дек
(рис. 9.8).
Желаемая характеристика LC (ω) строится так, чтобы она по
возможности меньше отличалась от ЛАЧХ нескорректированной системы LH (ω) . При этом получается корректирующее устройство наиболее простого
типа. Для этого допустимо увеличить запасы устойчивости L1 и L2 , изменить наклон сопрягающих прямых и наклон ВЧ–части.
|
|
|
94 |
|
|
|
σ, % |
|
|
|
|
|
|
60 |
|
|
|
|
tp, c |
|
50 |
|
|
|
|
|
|
40 |
|
tp |
|
|
4π ωс |
|
30 |
|
|
σ |
|
3π ωс |
|
20 |
|
|
|
2π ωс |
||
|
|
|
|
|||
10 |
|
|
|
|
π ωс |
|
0 |
|
|
|
|
Pмакс |
|
1 |
1.1 |
1.2 |
1.3 |
1.4 |
||
1.5 |
||||||
Рис. 9.8. Кривые для определения зависимости перерегулирования σ |
||||||
|
и времени регулирования tp от максимального |
|||||
|
значения вещественной характеристики |
|||||
L1, дБ |
|
|
|
|
|
|
γ, град |
|
|
|
|
|
|
60 |
|
|
|
|
|
|
50 |
|
|
γ |
|
|
|
40 |
|
|
|
|
||
|
|
|
|
|
||
30 |
|
|
|
|
|
|
20 |
|
L1 |
|
|
|
|
10 |
|
|
|
|
|
|
0 |
|
|
|
|
Pмакс |
|
1.1 |
1.2 |
|
1.3 |
1.4 |
||
|
1.5 |
|||||
Рис. 9.9. Кривые для определения запаса по амплитуде L1 и |
||||||
|
|
запаса по фазе γ |
|
|||
95
9.4.Корректирующие звенья
Врезультате синтеза корректирующих устройств получают передаточные функции звеньев, которые необходимо реализовать. В общем случае корректирующие устройства представляют элементы, осуществляющие то или иное преобразование сигнала управления.
Для этой цели применяют преобразовательные устройства различной физической природы: электрические, механические, гидравлические, пневматические и иные элементы. Наиболее широко распространены электрические преобразовательные элементы постоянного тока.
Такие корректирующие звенья можно разделить на две основные группы:
•пассивные четырехполюсники,
•активные четырехполюсники.
Впоследние годы в качестве регуляторов и корректирующих звеньев также все чаще применяют промышленные контроллеры, в которых программным способом реализуются различные законы управления.
9.4.1.Пассивные четырехполюсники
Эти четырехполюсники представляют собой электрические цепи, состоящие из резисторов, конденсаторов и индуктивностей, то есть из R–, L– и C–элементов. Такие звенья называют пассивными корректирующими устройствами, так как они не содержат источников электродвижущих сил.
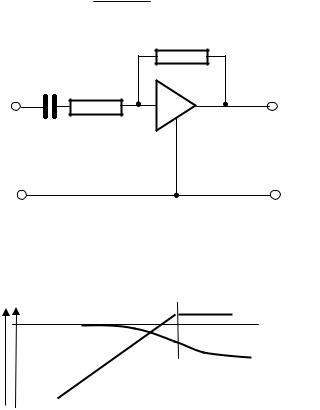
Пассивные четырехполюсники могут быть представлены в виде обобщенной эквивалентной схемы, изображенной на рис. 9.10.
|
Z1(p) |
|
|
u1 |
Z2(p) |
u2 |
ZН(p) |
Рис. 9.10
Функции Z!(p) и Z2(p) представляют собой сопротивления участков цепи в операторной форме. Влияние последующего звена учтено введением сопротивления нагрузки ZН(p). Входное и выходное напряжения постоянного тока обозначены соответственно через u1 и u2.
С учетом введенных обозначений передаточная функция пассивного четырехполюсника будет равна
|
|
|
|
|
|
|
|
|
|
96 |
|
|
|
|
||
|
|
|
|
|
|
|
|
ZН ( p )Z2 ( p ) |
|
|
|
|
||||
W( p ) = |
U2 ( p ) |
= |
|
|
|
ZН ( p ) + Z2 ( p ) |
|
. |
(9.16) |
|||||||
U1( p ) |
|
|
|
|
|
|||||||||||
|
|
|
|
Z1 |
( p ) + |
ZН ( p )Z2 ( p ) |
|
|
||||||||
|
|
|
|
|
|
ZН ( p ) + Z2 |
( p ) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Если напряжение u2 приложено к нагрузке с бесконечно большим |
||||||||||||||||
сопротивлением ZН(p), то выражение (9.16) приобретает вид |
|
|||||||||||||||
W( p ) = |
U2 ( p ) |
|
= |
|
|
|
Z2 ( p ) |
|
|
. |
|
|
|
(9.17) |
||
|
|
Z1 |
( p ) + Z2 ( p ) |
|
|
|
||||||||||
|
U1( p ) |
|
|
|
|
|
||||||||||
Передаточная функция (9.16), как правило, соответствует звеньям с более плохими корректирующими свойствами по сравнению с (9.17).
Варьируя вид операторов сопротивлений Z!(p) и Z2(p) можно получить большое количество четырехполюсников с различными передаточными функциями. Стоимость пассивных четырехполюсников низкая, а стабильность параметров достаточно высокая, поэтому эти звенья широко используются в системах автоматического управления. Недостатком пассивных четырехполюсников является то, что они только ослабляют сигнал.
Некоторые наиболее характерные схемы пассивных четырехполюсников представлены в прил. 4, в котором приведены их передаточные функции и логарифмические частотные характеристики.
Пассивные четырехполюсники принято разделять на дифференцирующие, интегрирующие и интегро-дифференцирующие.
Дифференцирующие четырехполюсники осуществляют дифференцирование сигнала в определенном диапазоне частот и создают положительный сдвиг по фазе. Интегрирующие четырехполюсники в некотором диапазоне частот обеспечивают интегрирование сигнала и создают отрицательный сдвиг по фазе. Интегро-дифференцирующие четырехполюсники в одном диапазоне частот осуществляют дифференцирование сигнала, а в другом диапазоне его
интегрируют.
9.4.2. Реализация сложных корректирующих звеньев
При практической реализации корректирующих звеньев с характеристиками, которые не удается реализовать с помощью одного звена иногда целесообразно соединить последовательно два или более четырехполюсника.
Передаточная функция таких последовательно соединенных звеньев (рис. 9.11) равна
WЭ( p ) =WK 1( p ) WK 2 ( p ), |
(9.18) |
Формула (9.18) справедлива при условии, что сумма полного сопротивления второго четырехполюсника Z!2(p)+Z22(p) значительно, по

|
|
97 |
|
|
Z11(p) |
Z12(p) |
|
u1 |
Z21(p) |
Z22(p) |
u2 |
WK2(p)
Рис. 9.11
крайней мере, на порядок, больше полного сопротивления Z21(p) первого четырехполюсника, то есть
Z!2(p)+Z22(p)>> Z21(p).
Для устранения взаимного влияния четырехполюсников их соединяют через разделительный усилитель с большим входным сопротивлением.
|
|
|
Z11(p) |
|
|
|
|
|
|
Z12(p) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u1 |
|
Z21(p) |
|
|
|
|
|
|
Z |
(p |
|
|
u2 |
||
|
|
|
|
|
У |
|
|
22 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
WK1(p) |
|
|
|
|
|
|
WK2(p) |
|
|||||
|
|
|
|
|
Рис. 9.12 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если входное сопротивление усилителя не влияет на передаточную |
||||||||||||||||
функцию WK1 ( p) , то передаточная функция такого соединения |
|
|||||||||||||||
WЭ( р) =WK 1( p ) KУ WK 2 ( p ), |
|
|
|
|
|
|
(9.19) |
|||||||||
где KУ – передаточный коэффициент усилителя.
Преимущество такой схемы и в том, что результирующий коэффициент усиления может быть больше единицы.
9.4.3. Активные четырехполюсники постоянного тока
Это корректирующие звенья, реализованные на основе операционных усилителей. Общая схема такого четырехполюсника имеет вид (рис. 9.13).
В схеме используются операционные усилители с коэффициентом усиления KУ ≥ 5 104 .
Тогда передаточная функция с достаточной точностью равна
W( p ) = − Z2 ( p ) . Z1( p )
Z2(p)
Z1(p) 
u1 |
u2 |
98
Рис. 9.13
Знак минус указывает на то, что усилитель инвертирует знак входного напряжения.
Активные четырехполюсники позволяют осуществить почти идеальное интегрирование или дифференцирование сигнала, особенно в ограниченной полосе частот.
Активные четырехполюсники обладают следующими свойствами:
•осуществляют почти идеальное интегрирование,
•передаточный коэффициент может быть велик,
•легко суммируются несколько сигналов,
•часто имеют меньшие габариты по сравнению с пассивными. Недостаток: дороже и сложнее пассивных четырехполюсников.
Примеры активных четырехполюсников.
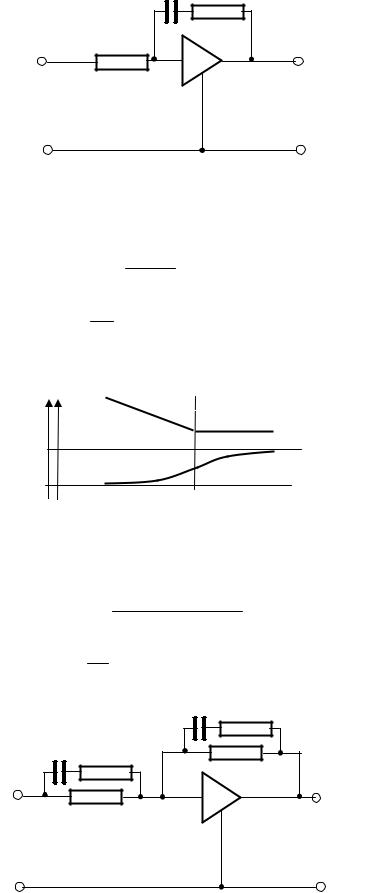
1. Реальное дифференцирующее звено (рис. 9.14).
Звено описывается передаточной функцией
W( p ) = −TkTp +p1 ,
R2
C R1
u1 |
u2 |
Рис. 9.14
где kT = R2C ; T = R1C; k = R2  R1 .
R1 .
Логарифмические частотные характеристики приведены на рис. 9.15.
φ |
L |
|
90 |
||
|
|
|
φ |
|
|
|
|
|
L |
20 дБ/дек T-1 |
ω |
|
|
|
||
|
|
|
|
99
Рис. 9.15 2. Пропорционально-интегральный регулятор (рис. 9.16).
C R2
R1
u1 |
u2 |
Рис. 9.16
Звено описывается передаточной функцией
W( p ) = −K TpTp+ 1,
где K = R2 ; T = R2C .
R1
Логарифмические частотные характеристики приведены на рис. 9.17.
φ |
L |
L |
T-1 |
|
|
-20 дБ/дек |
|
ω
φ
-90
Рис. 9.17
3. Интегро-дифференцирующее звено Звено описывается передаточной функцией
W ( p) = −K (T1 p +1)(T4 p +1) , (T2 p +1)(T3 p +1)
где K = R3 ; T1 = (R1 + R2 )C1 ; T2 = R2C1 ; T3 = (R3 + R4 )C2 ; T4 = R4C2 .
R1
C2 R4
C1 R2
R1 |
u1
R3 |
u2

100
Рис. 9.18
Логарифмические частотные характеристики приведены на рис. 9.19.
L |
-20 дБ/дек |
|
|
+20 дБ/дек |
|
||
|
|
|
|
||||
L1 |
|
|
|
|
L2 |
|
|
|
|
|
|
|
ω |
||
T3-1 |
T4-1 |
T1-1 |
T2-1 |
||||
|
|||||||
Рис. 9.19
Параметры логарифмической амплитудно-частотной характеристики будут равны
L1 = 20lg K ; L2 = 20lg R3 R4 (R1 + R2 )
R1R2 (R3 + R4 )
10. ПОВЫШЕНИЕ ТОЧНОСТИ САУ
Для уменьшения статических и динамических ошибок в САУ применяют следующие методы проектирования.
Общие методы.
Кчислу общих методов повышения точности САУ относятся:
Увеличение коэффициента усиления разомкнутой системы,Повышение степени астатизма,Применение регулирования по производным от ошибки,
Применение инвариантных систем 2-х типов:
–инвариантных по отношению к возмущающему воздействию,
–инвариантных по отношению к задающему воздействию.
10.1. Увеличение коэффициента усиления разомкнутой системы
Является наиболее общим и универсальным методом. Пусть имеем систему регулирования
|
|
|
|
|
|
f(p) |
|||
|
|
|
|
|
|
W3(p) |
|
|
|
g(p) |
X(p) |
|
|
|
|
y(p) |
|||
W1(p) |
|
|
W2(p) |
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

101
|
|
|
Рис. 10.1 |
|
|
Рассмотрим режим: |
|
|
|
||
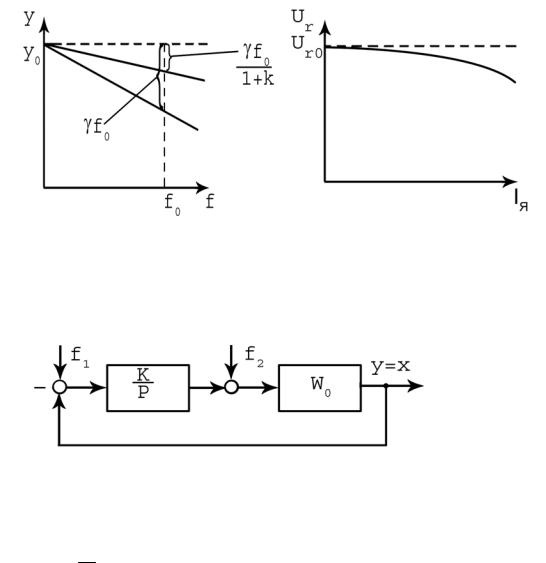
Неподвижное состояние. При этом g = g0 = const , |
f = f0 = const . |
||||
Ошибка системы x называется в этом случае статической. |
|||||
Найдем величину ошибки: |
Wf 0 ( p) |
|
|||
1 |
|
|
|||
X ( p) = |
|
g( p) + |
|
f ( p) , |
(10.1) |
1 +WP ( p) |
1 +WP ( p) |
||||
где |
|
|
|
||
WP ( p) =W1 ( p) W2 ( p) – |
передаточная функция разомкнутой системы, |
||||
Wf 0 ( p) =W3 ( p) W2 ( p) –передаточная функция объекта по возмущению.
Для получения установившегося значения, то есть статической ошибки нужно воспользоваться предельным переходом, если t → ∞, то p → 0 .
Например, если в W ( p) = TpK+1 положить p = 0 , то получим
W (0) = K – коэффициент передачи звена в установившемся состоянии. Подставим p = 0 в (10.1)
|
g0 |
|
Wf 0 |
(0) |
′ |
′′ |
|
xCT = 1 +WP (0) + |
|
|
|
||||
1 +WP (0) f0 = xCT |
+ xCT . |
(10.2) |
|||||
Первое слагаемое в (10.2) представляет собой составляющую ошибки от задающего воздействия.
Для статических систем WP (0) = K , где K – коэффициент разомкнутой
|
|
|
|
|
′ |
g0 |
|
, откуда |
K = |
g0 |
−1. |
(10.3) |
||||
|
|
|
|
|
|
|
|
|
|
|||||||
системы, тогда xCT = |
1 + K |
|
′ |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
xCT |
′ |
|
|||
Для астатических систем WP (0) → |
|
|
||||||||||||||
∞, тогда xCT = 0 . |
|
|||||||||||||||
Второе слагаемое в (10.2) представляет собой составляющую ошибки |
||||||||||||||||
от возмущающего воздействия |
|
|
|
|
|
|||||||||||
′′ |
|
|
Wf 0 (0) |
|
f0 . |
|
|
|
|
|
|
|
|
|
||
= 1 +WP (0) |
|
|
|
|
|
|
|
|
|
|||||||
xCT |
|
|
|
|
|
|
|
|
(10.4) |
|||||||
В статической системе получим |
|
|
|
|
||||||||||||
′′ |
= |
|
γ |
f0 |
K = |
γ |
f0 |
−1, |
|
|
|
|
(10.5) |
|||
xCT |
1 + K |
|
|
′′ |
|
|
|
|
||||||||
|
|
|
|
|
xCT |
|
|
|
|
|
|
|||||
где γ – отношение установившейся ошибки к постоянному возмущению (коэффициент статизма) в разомкнутой системе,
|
102 |
|
γ |
– коэффициент статизма в замкнутой системе (т.е. величина ошибки |
|
1 + K |
||
|
уменьшается в 1 + K раз).
Рис. 10.2
В астатической системе WP (0) → ∞, но это не значит, что xCT′′ = 0 , так как возможен случай, когда Wf 0 (0) → ∞, поэтому для каждого возмущения нужно находить значение (4).
Рис. 10.3
W0 (0) = K0
Wрег ( p) = Kp
В разомкнутой системе |
||||||||
|
|
|
|
|
|
|
|
|
x =W |
( p) |
K |
f |
|
+ |
f |
|
|
|
1 |
2 |
||||||
0 |
|
|
|
|
|
|||
|
p |
|
|
|
|
|
|
|
и в замкнутой |
|
|
|
|
|
|||
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
W ( p) |
f |
|
+ |
f |
|
|
|
|
|
||||||
|
1 |
2 |
|
|
|
||||||||||
0 |
|
p |
|
|
|
|
|
|
|
|
|||||
x = |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 +W ( p) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
Пусть |
f1 = f10 , |
f2 |
= f20 , тогда получим |
||||||||||||
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
||
|
|
W ( p) |
|
|
f |
10 |
+ f |
20 |
|
|
|||||
|
|
|
|
|
|||||||||||
|
|
0 |
|
p |
|
|
|
|
|
|
|||||
′′ |
|
|
|
|
|
|
|
|
|
|
= f10 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
xуст = |
|
1 +W ( p) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||