

u_lectures
.pdf53
и изображена на рис. 4.49.
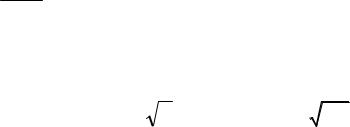
Частотная передаточная функция
W ( jω)=kjω , тогда U(ω)=0; V(ω)=kω.
ϕ(ω)=arctgUV ((ωω)) =arctg∞=90°
Построим ЛЧХ.
A(ω) = (kω)2 =kω L(ω) =20lgkω
Найдем наклон ЛАХ
20lgk +20lg10ω −(20lgk +20lgω) =+20дБ/дек
1) ω=1: L(ω)=20lg k
V
ω→∞
ω |
|
|
ϕ=90° |
U |
ω→0
Рис. 4.50
2) L(ω) =0 = 20lgkω |
ω = |
1 |
|
|
k |
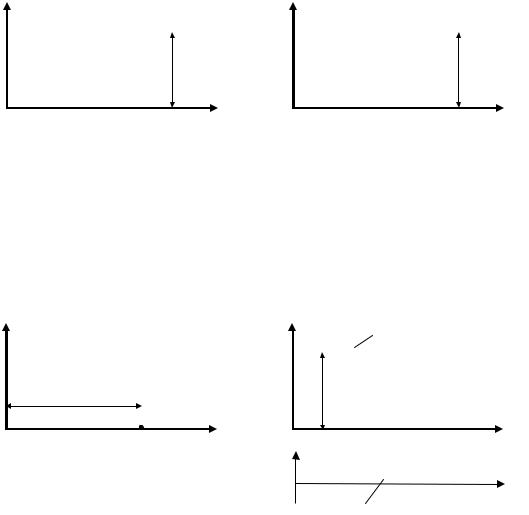
Логарифмические частотные характеристики приведены на рис. 4.51.
ϕL,дБ
|
|
|
|
40 |
ϕ(ω) |
|
|
|
|||
+90° |
|
|
|
|
|||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
20 |
ω=1 ω=1/К |
L(ω)+20дБ/дек |
|||||
|
|
|
|
||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
20lgK |
|
|
|
|
|
ω,с-1 |
|
|
|
|
|
10 |
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.51 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
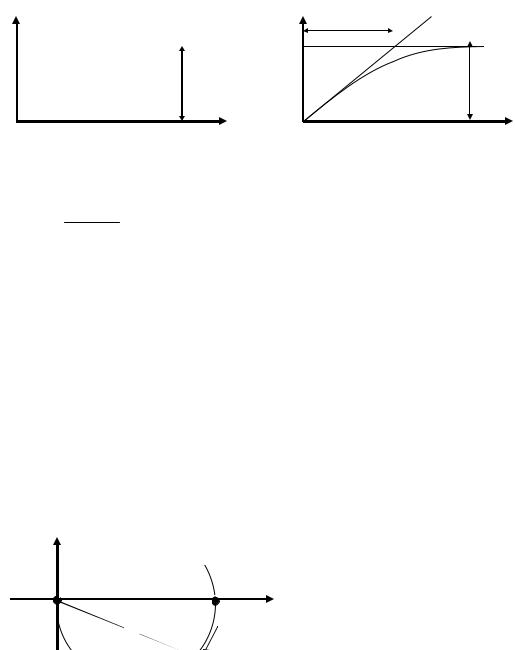
Примером звена является тахогенератор постоянного тока (рис. 4.52) в режиме холостого хода (Iя=0). При этом в качестве входной величины рассматривается угол поворота якоря, а в качестве выходной – э.д.с. якоря e.
|
Приближенно |
в |
качестве |
|
x2=e= K dα |
идеального |
дифференциального |
||
звена |
может |
рассматриваться |
||
dt |
|
|
|
|
Uв |
|
|
|
|
α=x1 |
|
|
|
|
Рис. 4.52

54
операционный усилитель в режиме дифференцирования.
Необходимо отметить, что осуществить дифференцирование сигнала в реальных системах довольно сложно из-за наличия помех.
Приближенно в качестве идеального дифференциального звена может рассматриваться операционный усилитель в режиме дифференцирования
(рис. 4.53).
С R
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2=x2 |
||||||
U1=x1 |
|
|
|
|
|
||||||||||||
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.53
Необходимо отметить, что осуществить дифференцирование сигнала в реальных системах довольно сложно. Если x1(t) имеет разрывы первого рода, то получение точной производной невозможно.
4.5.1. Дифференцирующее звено с замедлением
Описывается уравнением
T dx2 +x =kT dx1 dt 2 dt
Передаточная функция
W ( p)= kTp
Tp+1
Переходная функция (рис. 4.55)
|
− |
t |
|
|
|
|
|
T |
|
|
|
||||
h(t)=ke |
|
|
|
||||
x1 |
|
|
|
x2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
k |
||
|
|
|
|
|
|
||
|
|
|
|
t |
|
|
t |

55
Рис. 4.54 |
Рис. 4.55 |
Частотные характеристики
W ( jω)= kTjω
Tjω+1
V
ω=0 ω=∞
U k 

Рис. 4.56
Логарифмические частотные характеристики (рис. 4.57).
ϕ(ω) L(ω)
+90°
+45°
20lgk
ω,с-1
1 |
1/T |
10 |
+20
Рис. 4.57
Примеры:
С
U1=x1 R 
 U2=x2
U2=x2
Рис. 4.58 |
Рис. 4.59 |
|
56
z = |
|
1 |
|
|
z =R |
|
|
|
|
|
|
|||||||||
Cp |
|
|
|
|
|
|
||||||||||||||
1 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
||||||||
U |
|
= |
|
z2 |
U |
= |
|
R |
U |
= |
RCp |
U |
||||||||
|
|
|
|
|
|
|||||||||||||||
|
2 |
|
|
|
z1 +z2 |
1 |
|
|
|
|
|
|
1 |
1 |
|
RCp+1 |
1 |
|||
|
|
|
|
|
|
|
|
|
|
R+Cp |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W = |
|
RCp |
|
= |
|
|
Tp |
|
, |
|
|
k=1. |
|
|
||||||
|
|
|
|
Tp+1 |
|
|
|
|
||||||||||||
|
|
|
|
RCp+1 |
|
|
|
|
|
|
||||||||||
Выше рассмотрены типовые линейные звенья, которые наиболее часто встречаются в системах управления, но в некоторых САУ встречаются и другие типы звеньев, например:
1) неминимально-фазовые устойчивые звенья (имеют нули в правой полуплоскости), 2) неустойчивые звенья (имеют полюсы в правой полуплоскости)
W( p)=Tpk−1,
3)звенья с распределенными параметрами, которые делятся на:
•иррациональные и описываются иррациональными функциями;
W ( p)= |
k |
; |
W ( p) = |
|
k |
|
; |
p |
+ |
|
|||||
|
|
|
pT |
||||
|
|
|
|
1 |
|||
•трансцендентные, описываемые трансцендентными функциями; например,
W ( p)=e−pτ - звено чистого запаздывания.
4. ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
Любую САУ можно разделить на ряд элементов, которые описываются определенными дифференциальными уравнениями. Причем одним классом дифференциальных уравнений могут описываться элементы различной физической природы (электрические, механические, тепловые и т.д.). Этот факт позволяет все многообразие элементов систем изучать на основе ограниченного числа типовых динамических звеньев.
Поэтому класификация звеньев осуществляется именно по типу дифференциального уравнения или по виду передаточной функции.
Для каждого звена будем рассматривать следующие характеристики:
1.дифференциальное уравнение,
2.передаточная функция – W(p);
57
3.переходная функция – h(t);
4.частотные характеристики: W(jω), L(ω), ϕ(ω);
5.примеры.
4.1. Безынерционное или пропорциональное звено
Описывается в статике и динамике уравнением
x2 = Kx1,
где K - коэффициент усиления или передачи звена.
Передаточная функция имеет вид
W(p) = K.
Переходная функция звена |
h(t) = K ×1(t) = K . |
|||
x1 |
x2 |
h(t) |
||
|
|
|
|
|
1 |
|
K |
||
|
|
t |
|
t |
|
|
|
|
|
|
Рис. 4.1 |
|
Рис. 4.2 |
|
|
|
|
|
|
Частотнвя передаточная функция имеет вид
W(jω) = K.
Характеристики изображены на рис. 4.3 – 4.5.
V(ω) |
|
L(ω) |
|
L(ω)=20lgK |
|
|
|
|
|
|
|
K |
|
U(ω) |
|
20lgK |
|
|
|||||
|
|
|
|
|
|
Рис. 4.3 АФХ |
|
ϕ(ω) |
|
Рис. 4.4. ЛАЧХ |
|
|
|
||||
|
|
|
|
|
|
|
0° |
|
|
|
|
|
|
ϕ(ω)=0° |
|||
|
|
|
|
||
|
|
|
|
Рис. 4.5. ЛФЧХ |
|
ω
ω
Примеры звеньев.

58
1) Делитель напряжения.
|
Uвх |
|
|
R1 |
|
|
UВЫХ |
= K UВХ, |
|
|
|
|
|
|
|
|||||||
|
|
R2 |
Uвых K= R2/(R1+R2). |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
Рис |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) Электронный усилитель |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Электронный |
|
|
|
|
|
|
Uвых = K Uвх |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Uвх |
|
|
|
Uвых |
|
|
|
|
|
||||||||||||
|
|
усилитель |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. |
|
|
|
|
|
|
|
|
|
|
|
|
||
3) Механический рычаг. |
|
|
|
|
Если пренебречь массой рычага, то |
|||||||||||||||||
|
|
|
l1 |
|
|
|
|
|
|
|
x2 |
|
l2 |
x |
= Kx , где |
|
l2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
x |
= |
K = |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
l1 |
1 |
1 |
|
l1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
x1 |
|
|
|
l2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Рис. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4.2. Апериодическое звено первого порядка
Описывается уравнением
T |
dx2 |
+ x |
2 |
= kx |
; |
|
|||||
|
dt |
1 |
|
||
|
|
|
|
||
где: k – коэффициент усиления, T – постоянная времени. Передаточная функция
W ( p) =Tpk+1 .
Найдем переходную функцию звена, решив дифференциальное уравнение. Характеристическое уравнение имеет вид
Tr +1=0 ;
|
|
|
|
|
|
|
|
|
|
|
|
|
|
59 |
|
|
|
|
|
|
|
Откуда единственный корень |
r =− |
1 |
. |
|
|
|
|
||||||||||||||
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
||||||
Тогда общее решение дифференциального уравнения |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
− |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
= Cert = Ce T . |
|
|
|
|
|
|
|
|
||||||||
|
|
x |
2 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если |
x (t) =1(t) , то частное решение x =k . |
|
|||||||||||||||||||
Тогда |
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
−t |
|
|
|
|
|
|
|
|
||||||
|
|
x2 = |
|
+ x2 =Ce T +k ; |
|
|
|
|
|
|
|
|
|||||||||
|
|
x2 |
|
|
|
|
|
|
|
|
|||||||||||
Подставив начальные условия: t = 0, x2 = 0, получим x2(0) = С + k = 0, |
|||||||||||||||||||||
откуда C = |
– k. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Окончательное выражение для переходной функции (рис. 4.10) примет |
|||||||||||||||||||||
вид |
|
|
|
|
|
|
− |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x2 = h(t) = k(1−e T ) . |
|
|
|
|
|
|
|
|
|||||||||||||
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
T |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
h(t) |
K |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
Ри |
|
|
|
|
|
|
|
|
|
|
|
Рис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Частотная передаточная функция |
4 10 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
W ( jω) = Tjωk +1
Ее можно представить |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
W ( jω) = |
k |
|
× |
(−Tjω +1) |
= |
|
|
k |
|
|
|
− j |
|
kTω |
|
; |
||||
|
(−Tjω +1) |
|
|
|
|
|
|
|
|
|
||||||||||
Tjω +1 |
|
2 2 |
+1 |
|
2 2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
T |
|
ω |
|
T |
ω |
+1 |
||||||
U (ω) = |
|
|
k |
|
|
; |
V (ω) = − |
kTω |
|
; |
|
|
|
|
||||||
|
2 2 |
|
2 2 |
|
|
|
|
|
|
|
||||||||||
T |
|
ω |
+1 |
|
|
|
|
T ω |
+1 |
|
|
|
|
|||||||
Годограф изображен на рис. 4.11.
V
U(ω1)

 U
U
ω→∞  ϕ(ω1) ω=0
ϕ(ω1) ω=0
A(ω
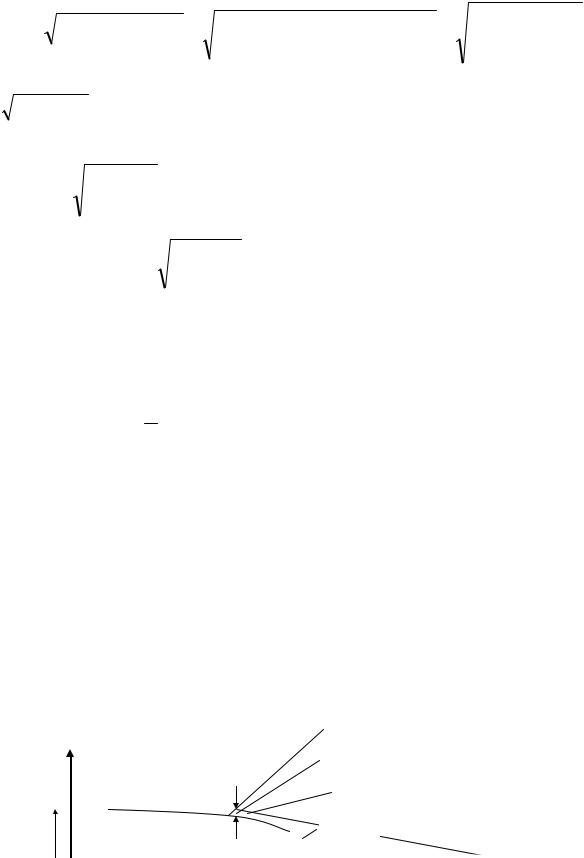
60
A(ω) = U |
2 |
(ω) +V |
2 |
(ω) = ( |
|
|
k |
|
) |
2 |
+( |
|
kTω |
|
) |
2 |
= |
k 2(T 2ω2 +1) |
= |
||||||||||
|
|
|
2 2 |
|
|
|
2 2 |
|
|
2 2 |
+1) |
2 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
ω |
+1 |
|
T |
ω |
+1 |
|
|
(T ω |
|
|
|||||
= |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T 2ω2 +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
A(ω) = |
|
|
|
|
k |
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T × ω2 + |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
T 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
L(ω) =20lgk −20lgT |
|
ω2 + |
1 |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
V (ω) |
|
|
|
T 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ϕ(ω) =arctg |
=arctg(−Tω) =−arctgTω; |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
U (ω) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Построим ЛАЧХ (рис. 4.12)
3)Пусть ω <T1 , тогда пренебрегаем ω и считаем ω2 ≈ 0
L(ω) =20lgk −20lg1=20lgk
4) |
Пусть ω > |
1 |
, тогда ω2 >> |
1 |
|
T |
T 2 |
||||
|
|
|
L(ω) =20lgk −20lgTω = L1(ω) +L2(ω)
Определим наклон L2(ω) на декаду
−20lgT 10ω −(−20lgT ω) =−20lgTω−20lg10+20lgTω =−20дБ/дек
L(ω) |
|
|
|
|
Приближенная (асимптотическая) |
|
|
|
|
Погрешность 3 дБ |
|||
|
|
|
|
|
||
|
|
|
40 |
|
|
Точная |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
-20дБ/дек |
|
20lgk |
|
20 |
|
|||
|
|
|
|
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
61
Ри
Примеры звена.
1. RC–цепь, изображенная на рис. 4.13.
Приведенная RC–цепь описывается уравнением
RC |
du2 |
+ u2 = u1 , |
|
|||
dt |
|
|||||
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
где T=RC – постоянная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
времени звена. |
u1 |
|
|
|
|
C |
|
|
|
u2 |
||||
Рис. 4.13
Передаточная функция может быть найдена также через комплексные сопротивления ветвей
z ( p ) = R; z |
2 |
( p ) = |
1 |
. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||
1 |
|
|
|
|
Cp |
|
1Cp |
|
|
|
|
|||
W ( p) = |
U2( p) |
= |
|
I ( p) z2( p) |
|
== |
= |
1 |
|
. |
||||
U1( p) |
I ( p)[z2( p) + z1( p)] |
|
|
|
||||||||||
|
|
|
R + 1Cp |
RCp +1 |
|
|||||||||
2. Генератор постоянного тока, приведенный на рис. 4.14.

Uв=x1 Г
Рис. 4.14
62
Свойства генератора описываются передаточной функцией
W( p ) = |
EГ ( p ) |
|
= |
|
K Г |
|
, |
||
|
T p + 1 |
||||||||
|
U |
В |
( p ) |
|
|
||||
Eг=x2 |
|
|
|
|
|
В |
|
||
|
|
|
|
|
|
|
|
|
|
где UВ – напряжение обмотки
возбуждения; ЕГ – э.д.с. генератора; TВ – электромагнитная постоянная обмотки
возбуждения; КГ – коэффициент передачи генератора.
4.3. Звено второго порядка
Его динамические свойства описываются дифференциальным уравнением второго порядка
T22 d 2 x2 +T1 dx2 + x2 = kx1 . dt2 dt
Звену соответствует передаточная функция:
W ( p) = |
|
k |
|
|
|
. |
|
T 2 p2 |
+T p +1 |
||
2 |
1 |
|
|
Характеристическое уравнение звена и его корни имеют вид
T 2 r2 |
+T r + 1 = 0; |
r = |
−T ± |
T 2 |
− 4T 2 |
|
1 |
1 |
2 . |
||||
2 |
1 |
1,2 |
|
2T |
2 |
|
|
|
|
|
|
||
|
|
|
|
2 |
|
|
Возможны два случая:
1.T12 − 4T22 < 0 – корни комплексные, а звено называется колебательным;
2.T12 − 4T22 ≥ 0 – корни действительные отрицательные, а звено является апериодическим второго порядка.
4.3.1. Колебательное звено
Передаточную функцию звена в этом случае принято записывать в следующем виде