u_lectures
.pdf173
Схема САУ имеет вид:
xвх |
АЦ |
|
ЦВ |
|
ЦА |
|
WН( |
xвых |
|
|
|
|
|
|
|
||
- |
П |
|
М |
|
П |
|
p) |
|
WК*(p)
Рис. 20.3
20.2. Условия конечной длительности переходного процесса
В непрерывных системах переходный процесс теоретически длится бесконечное время, но в импульсных САУ возможно получение процесса, который не только практически, но и теоретически заканчивается за конечное время.
Из определения дискретной передаточной функции импульсной системы следует, что
* − plT
W ( p) = ∑w(lT )e ,
l =0
где w(lT) – значения функции веса при t = lT.
Рассмотрим получение дискретных значений функции веса способом, основанным на разложении изображения W*(p) в ряд по степеням e-pT
W*(p) = B*( p) = b0empT +b1e(m−1) pT +... +bm = A*( p) a0enpT + a1e(n−1) pT +... + an
= w[(n − m)T ]e−(n−m) pT + w[(n − m +1)T ]e−(n−m+1) pT +.... (20.1)
Коэффициенты ряда – значения весовой функции в моменты t = lT.
Если спроектировать импульсную систему регулирования так, что выполняются условия конечной длительности переходного процесса
(20.2)
174 |
|
a1 = a2 = … = an = 0, |
|
то есть |
(20.2) |
A*(p) =a0 enpT . |
|
Тогда ряд (20.1) получается конечным |
|
1 |
[b0e−(n−m) pT + b1e−(n−m+1) pT +... + bme−npT ]. |
W*(p) = a0 |
Что означает, что w(lT) затухает за конечное число периодов T, равное порядку системы n, то есть время переходного процесса равно
tП = nT. |
(20.2) |
Выполнение условий конечной длительности (20.2) делает систему оптимальной в смысле быстродействия, так как в любом другом случае при прочих равных условиях длительность переходных процессов будет больше.
Пример. Передаточная функция замкнутой системы, содержащей звено с прямоугольными импульсами, и непрерывной частью WН(p)
= kp будет равна
* |
|
kT |
|
|||
W (p) = |
|
|
|
|
. |
|
epT |
−1+ kT |
|
||||
Условие конечной длительности переходных процессов |
|
|||||
|
|
k = |
1 |
. |
(20.3) |
|
|
|
|
||||
|
|
T |
|
|||
Тогда передаточная функция имеет вид |
|
|||||
W*(p) = e− pT |
и соответствует условиям конечной длительности. |
|
||||
Конечная длительность переходных процессов в импульсных системах не всегда может быть достигнута подбором параметров. В общем случае необходимо ввести в систему некоторое корректирующее звено с передаточной функцией D*(p).
175
Если оно включается последовательно в цепь ошибки замкнутой системы, то условие конечной длительности переходного процесса принимает вид:
|
|
|
|
D*( p) Wp*( p) |
|
B*( p) |
|
|
W*(p) = |
|
|
= |
1 |
, |
(20.4) |
||
|
|
a0enpT |
||||||
|
|
1 + D*( p) Wp*( p) |
|
|
|
|||
где B1*(p) – полином от epT степени не выше n. |
|
|||||||
Из (20.4) получаем: |
|
|
|
|
||||
|
* |
|
|
B*( p) |
|
|
|
|
|
1 |
|
|
|
|
|||
D |
|
( p) = |
Wp*( p)[a0enpT − B1*( p)]. |
|
(20.5) |
|||
Выражение (20.5) позволяет определить передаточную функцию корректирующего звена, введение которого позволяет получить процесс конечной длительности.
21. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ИМПУЛЬСНЫХ САУ
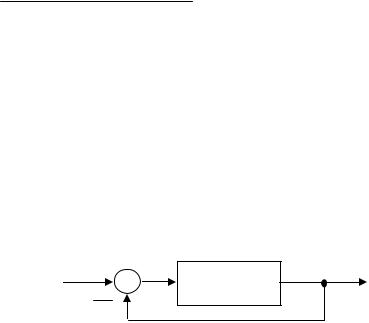
Пусть имеем структурную схему замкнутой импульсной САУ
(рис.21.1).
Х*вх
Wp ( p) Х*вых
Рис. 21.1
Найдем передаточную функцию замкнутой системы и изображение выходной величины
W * (p) = |
Wp * (p) |
(21.1) |
|
1+Wp * (p) |
|
||
Xвых* (p) =W * (p) Xвх* (p) |
(21.2) |
||
Для перехода от изображения к оригиналу существуют методы:
1. Для перехода от изображения Xвых* ( p) к дискретным значениям
выходного сигнала xвых(lT) можно воспользоваться формулой обратного преобразования Лапласа для дискретных сигналов:
176
|
|
T |
|
c + j ωи |
|
|
|
||||
xвых (lT ) = |
|
|
∫2 |
X вых* ( p ) e plT dp |
(21.3) |
||||||
|
2π |
|
|||||||||
|
|
j c − j |
ωи |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 |
|
|
|
|
|||
2. Если изображение выходного сигнала имеет вид дробно- |
|||||||||||
рациональной функции от epT, например, |
|
|
|||||||||
X вых* ( p ) |
= |
B * ( p ) |
|
= b0 e mpT |
+ b1e ( m −1) pT |
+ K + bm , |
|||||
A * ( p ) |
|||||||||||
|
|
|
a 0 e npT |
+ a1e ( n −1) pT |
+ K + a n |
||||||
тогда дискретные значения выходного сигнала можно найти по формуле разложения
|
n |
|
B* ( p ) |
|
|
|
p lT |
|
|
xвых(lT ) = ∑ |
|
|
k |
|
|
e |
k |
(21.4) |
|
epkT |
• |
|
|
||||||
|
k=1 |
A ( p |
k |
) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
где: pk – корни характеристического уравнения A*(p)=0, |
|
||||||||
• |
* |
|
|
|
|
|
|
|
|
A ( p) = |
dA ( p) |
. |
|
|
|
|
|
. |
|
|
|
|
|
|
|
||||
|
d (epT ) |
|
|
|
|
|
|
||
В частном случае, если известна передаточная функция системы,
W * ( p ) = |
B * ( p ) |
, |
|
A * ( p ) |
|||
|
|
то можно найти реакцию на типовые входные сигналы, то есть весовую и переходную функции.
Дискретные значения переходной функции равны
|
B* (0) |
n |
B* ( p ) |
|
p lT |
|
h(lT ) = |
|
+ ∑ |
k |
e |
k |
. |
* |
• * |
|
||||
|
A (0) |
k =1 |
(epkT −1)A ( pk ) |
|
|
|
Дискретные значения функции веса можно определить
n |
B |
* |
( pk ) |
e pk l T . |
|
w(lT ) = ∑ |
|
|
|||
|
pkT |
|
• * |
||
k =1 |
|
|
|||
|
e |
|
|
A ( pk ) |
|
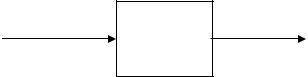
3. Если входной сигнал имеет произвольную форму, то, зная весовую функцию системы, можно найти дискретные значения сигнала на выходе системы при произвольном воздействии на ее входе.
W*(p)
|
177 |
Х*вх |
Х*вых |
Рис. 21.2
l
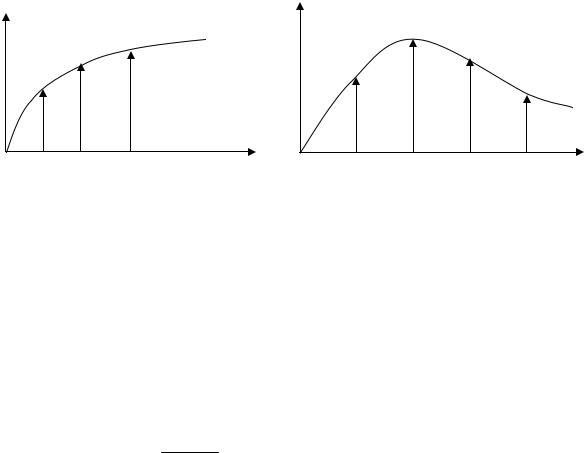
xвых(t) = ∑xвх(iT )w(t −iT ) для lT < t ≤ (l +1)T ,
i=0
где w(t) – весовая функция замкнутой системы. Для t = lT, то есть дискретных моментов, получим
l
xвых(lT ) = ∑xвх(iT )w(lT − iT ) .
i=0
хвых
хвх
T 2T |
3T |
t |
T |
2T |
3T |
4T |
t |
|
|
|
Рис. 21.3 |
iT |
|
lT |
|
|
|
|
|
|
|
|
4. Для нахождения дискретных значений сигналов xвых(lT) можно воспользоваться известным соотношением дискретного преобразования Лапласа:
∞
Хвых* ( p) = ∑xвых(lT )e− plT = xвых(0T )e−0 pT + xвых (T )e− pT +
l=0
+xвых(2T )e−2 pT + xвых(3T )e−3 pT +K
То есть разлагаем Xвых( p) в ряд по степеням e−pT и дискретные значенияxвых(lT ) – это коэффициенты ряда.
Если X *вых ( p) = BA** (( pp)) является дробно - рациональной функцией,
то разложение в ряд осуществляется путем деления числителя на знаменатель.
Пример. Передаточная функция замкнутой системы имеет вид
W * ( p) = |
0.1 |
. |
|
||
3 |
e2 pT −1.3e pT + 0.4 |
|
|
|
178
На |
входе |
действует единичный |
ступенчатый |
сигнал |
xвх(t) =1(t) . |
||||||||||||||
Построить переходный процесс на выходе системы. |
|
|
|
epT |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ранее получено изображение входного сигнала Xвх( p) = |
|
|
. |
|
|||||||||||||||
epT − |
1 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для сокращения заменяем |
e pT = z . Найдем изображение выходного |
||||||||||||||||||
сигнала |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
вых |
(z) =W (z) X |
вх |
(z) = |
|
0.1 |
|
|
z |
= |
|
0.1z |
|
|
. |
||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
3 |
|
z2 |
−1.3z |
+ 0.4 |
|
z −1 |
|
z3 |
− 2.3z2 |
+1.7z −0.4 |
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
Разлагаем в ряд, поделив числитель на знаменатель, и получим
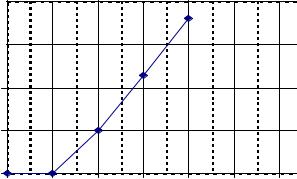
Xвых(z) = 0.1 z-2+0.23 z-3+0.36 z-4 + …
Коэффициенты при z -1 = e -pT у частного представляет собой значения дискретной выходной величины xвых(lT ) . Таким образом, получим:
при l = 0 и l = 1 имеем xвых(0) = xвых(T) = 0, далее получаем xвых(2T) = 0.1, xвых(3T) = 0.23, xвых(4T) = 0.36 и так далее.
На рис. 21.4 построены точки, соответствующие дискретным значениям, а пунктирной линией обозначен непрерывный выходной сигнал.
|
0 , 4 |
|
|
|
|
|
0 , 3 |
|
|
|
|
Xвых |
0 , 2 |
|
|
|
|
|
|
|
|
|
|
|
0 , 1 |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
Т |
2 Т |
3 Т |
4 Т |
|
|
|
|
|
t |
|
|
|
Рис.21.4 |
|
|
179
22. ПРИМЕНЕНИЕ ЛЧХ ДЛЯ ИМПУЛЬСНЫХ САУ
22.1. ЛЧХ импульсных САУ
ЛЧХ для непрерывных САУ позволили развить приближенные методы, упрощающие решение задач анализа и синтеза САУ.
Целесообразно использовать ЛЧХ и для импульсных систем, когда не только расчет частотных характеристик, но даже получение передаточных функций затруднено.
Однако простое применение логарифмических масштабов для частотных характеристик импульсных САУ не дает преимуществ, так как передаточные функции имеют трансцендентный характер.
Однако частотные характеристики можно построить, если использовать замену переменных:
z = |
1+ v |
|
|
|
|
|
|
|
|
|
|
|
|
|
(22.1) |
|||||
1− v |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Откуда получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
v = |
z −1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(22.2) |
|||||
z +1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
При z = e jωT |
|
= cos ωT + j sinωT выражение (22.2) принимает вид: |
||||||||||||||||||
v = j |
|
|
|
|
sinωT |
|
= j tg ωT . |
|
|
(22.3) |
||||||||||
1+ cosωT |
|
|
||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
||||||||||||
Вместо переменной v более удобно рассматривать пропорциональную |
||||||||||||||||||||
ей величину |
|
|
|
|
|
|
2 |
|
|
2 |
|
z −1 |
|
2 |
j tg ωT = jω*, |
|
||||
|
|
|
|
|
|
w = |
v = |
|
= |
(22.4) |
||||||||||
|
|
|
|
|
|
|
|
T |
|
T |
||||||||||
|
|
|
|
|
|
|
|
|
|
T |
|
z +1 |
2 |
|
||||||
где ω* = |
2 |
tg |
ωT |
– абсолютная псевдочастота. |
|
|||||||||||||||
|
|
|
||||||||||||||||||
|
|
T |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
181
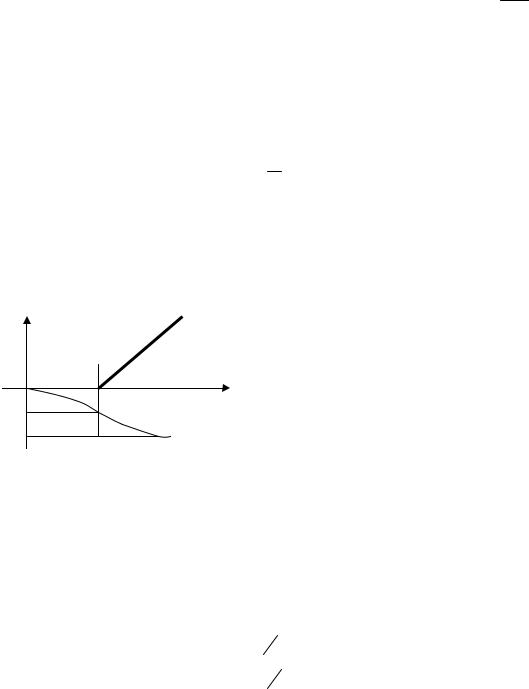
Отметим особенности передаточных функций типа (22.7):
1. Они содержат неминимально–фазовый сомножитель 1− wT2 в общем
случае в степени (n – m). В результате степень числителя Wp(w) равна степени знаменателя.
|
|
T |
|
2. Рассмотрим сомножитель W (jω* )= 1 |
− jω* |
|
. |
|
|||
|
|
2 |
|
Фазовая характеристика этого сомножителя изменяется от 0 до -900 в
диапазоне 0 ≤ω* ≤ ∞, а при ω* = T2 фазовый сдвиг равен – 450.
Амплитудная характеристика совпадает с характеристикой обычного форсирующего звена.
3. |
|
Если T → 0 , то |
2 |
→ ∞ и характеристики для импульсных систем |
|||||
|
|
||||||||
|
|
|
|
|
T |
|
|
|
|
будут совпадать с характеристиками для непрерывных систем. |
|||||||||
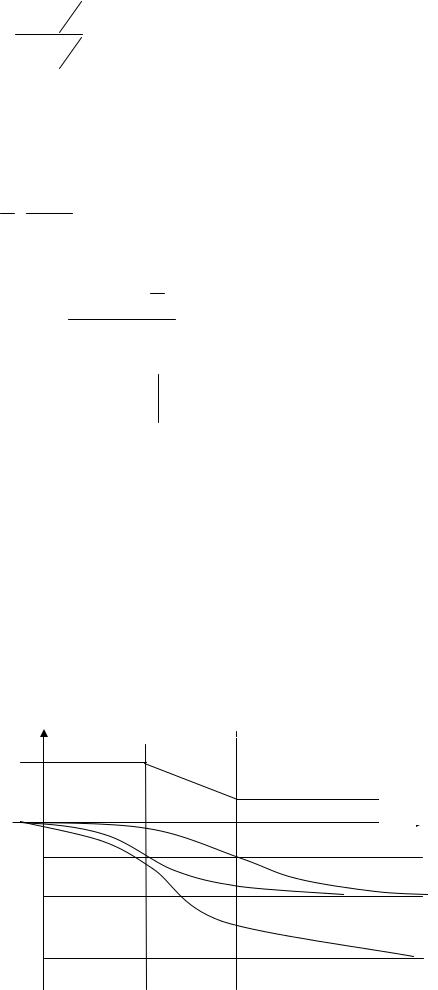
ϕ |
L |
|
2 |
|
|
|
|
|
|
|
T |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
+20 дБ/дек |
|
|
|
||
|
|
|
|
|
|
ω* |
|
|
|
-450 |
|
|
|
ϕ(ω*) |
|
|
|
|
|
-900 |
|
|
|
|
|
|
|
|
|
|
|
Рис. 22.1 |
|
|
|
|
|
||
Пример. Построить ЛЧХ для системы с передаточной функцией |
|||||||||
непрерывной части |
|
WH (p)= |
k |
|
и импульсным звеном с |
||||
|
T1 p +1 |
||||||||
|
|
|
|
|
|
|
|
||
прямоугольными импульсами. Тогда передаточная функция разомкнутой импульсной системы имеет вид:
|
|
|
|
|
|
(z)= k(1−e |
−T |
T1 ) = |
|
b0 |
|
||
|
|
|
|
W |
p |
|
|
, |
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
epT −e−T T1 |
z − a0 |
||||||
|
|
|
|
|
|
− |
T |
|
|
|
|
|
|
|
= k(1 − a |
|
); |
|
|
|
|
|
|
|
|
||
где b |
0 |
a |
0 |
= e T1 , z = e pT . |
|
|
|||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
||
Перейдем к переменной w