

u_lectures
.pdf213
X2

 С
С
X1
Рис. 26.13
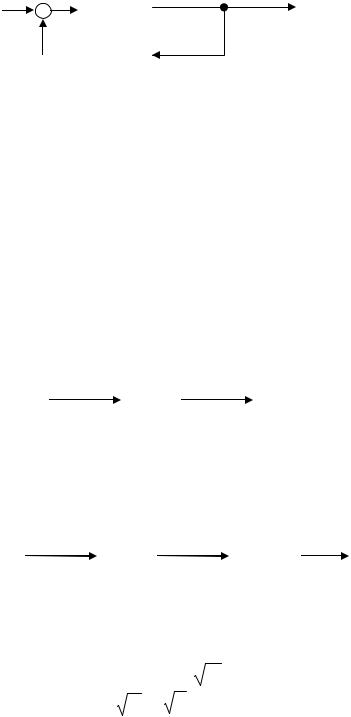
26.5.Основные виды соединений нелинейных звеньев
1)Последовательное соединение.
x=x1 |
|
y1=x2 |
|
y2=y |
|
F1(x1) |
F2(x2) |
||||
|
|
|
|||
|
|
|
|
|
Рис. 26.14
Сигнал “y” на выходе из системы
y=F2(x2)=F2[F1(x1)]=F2[F1(x)] |
(26.1) |
||||
Если звенья поменять местами, то получим |
|||||
|
|
|
y2=x1 |
|
y1=y |
x=x2 |
F2(x2) |
|
F1(x1) |
||
|
|
|
|||
|
|
|
|
|
|
|
|
Рис. 26.15 |
|
|
|
|
|
|
|
На выходе системы |
|
y = F1(x1) = F1[F2 (x2 ) = F1[F2 (x )] |
(26.2) |
||||
Пусть в обоих случаях входные сигналы “x” равны, тогда из (26.1) и (26.2) следует, что выходные сигналы не равны.
Следовательно, при последовательном соединении нелинейных звеньев не выполняется принцип коммутативности, поэтому НЗ нельзя менять местами.
2) Параллельное соединение
x |
|
x1 |
F1(x1) |
y1 |
|
|
y |
||
|
|
|
||
|
|
|
||
|
|
x2 |
F2(x2) |
y2 |
|
|
|||
|
|
|
|
|
214
Рис. 26.16
x = x1 = x2
y = y1 + y2 = F(x1) + F(x2)
3) Встречно– параллельное соединение звеньев.
x x1 |
F1(x1) |
y1 = y |
|
- |
y2 |
|
x2 |
|
|||
|
F2(x2) |
||
|
|
||
|
|
|
|
Рис. 26.17
y = F1( x1) = F1( x – y2 ) = F1[ x - F2(y)]
Выходная величина выражена в этом случае неявно.
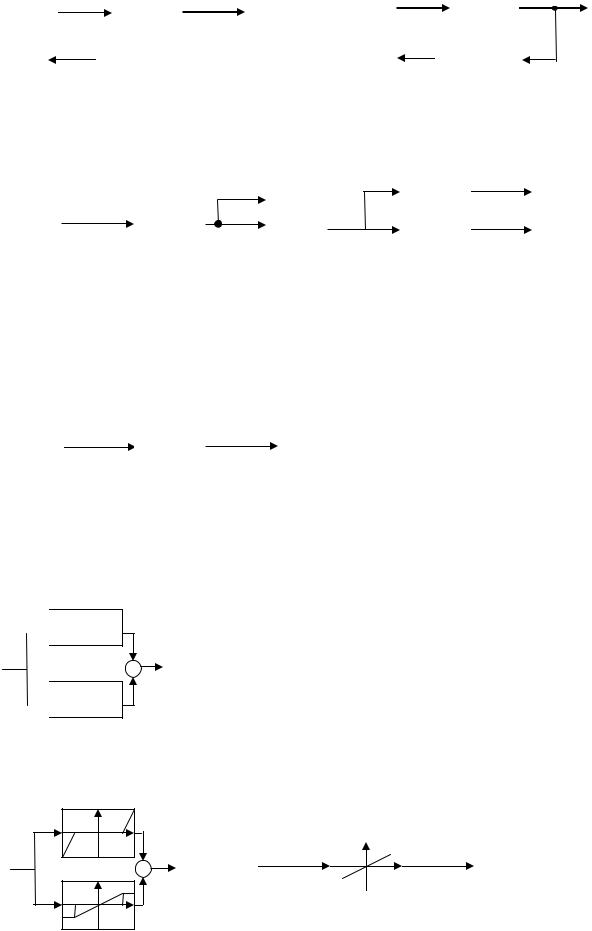
26.6. Способы нейтрализации нелинейных звеньев
Нейтрализация нелинейных звеньев применяется для того, чтобы исключить нелинейные звенья и приблизить систему к линейному виду.
Существует 2 способа нейтрализации
I) Последовательное включение звеньев
Пусть в НЗ «y» зависит от «x» нелинейно.
x = x1 |
|
F(x1) |
y1 |
|
|
|
|
|
Рис. 26.18 |
|
|
Для того чтобы сделать связь между y и x линейной можно последовательно с этим НЗ включить другое НЗ с обратной характеристикой.
x = x1 |
F(x1) |
y1=x2 |
F-1(y1) |
y |
|
|
|
|
|
Рис. 26.19
y = F-1(y1) = F-1[ F(x1)] = x
Пример. |
|
|
|
|
|
|
|
|
Пусть y1 = x2, а |
|
y |
|
|
|
y1 |
||
|
|
|||||||
|
||||||||
тогда y |
|
y |
|
x2 |
|
x |
||
|
|
|
||||||
|
|
1 |
|
|
|
|
|
|
Это свойство используется для преобразования структурных схем
 F
F F
F216
б
а
27. ПРИБЛИЖЕННЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ НА ОСНОВЕ МЕТОДА ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ НЕЛИНЕЙНОСТЕЙ
27.1. Метод гармонической линеаризации нелинейностей
Из-за трудностей описания нелинейные системы обычно сводят, если это возможно к линейным.
Ранее была рассмотрена линеаризация в близи рабочей точки, однако она требует непрерывных функций и малых отключений это – линеаризация во временной области.
Гармонической линеаризация – это линеаризация в частотной области. При этом нелинейный элемент заменяется линейным, но эквивалентным исходному только относительно основной составляющей колебаний. Гармоническая линеаризация может успешно применяться в случае разрывных кривых и значительных отклонений переменных.
Этот метод нашел широкое применение для определения автоколебательных процессов и устойчивости нелинейных систем.
Является мощным методом исследования, так как применяется для систем любого порядка.
Единственное ограничение: необходимо, чтобы линейная часть системы обладала хорошими фильтрующими свойствами, то есть подавляла все гармоники, кроме первой.
Пусть имеем НЗ, которое описывается уравнением:
x2 = F(x1, px1 ) |
(27.1) |


218
Эта операция называется гармонической линеаризацией.
Если на входе НЗ действует сигнал с постоянной амплитудой и частотой, то q и q` являются постоянными. Таким образом, коэффициенты линеаризации будут постоянны при постоянных значениях a и ω, то есть в случае периодического процесса. Однако в общем случае это условие не выполняется и коэффициенты q и q` будут переменными и зависят от амплитуды входного сигнала и его частоты.
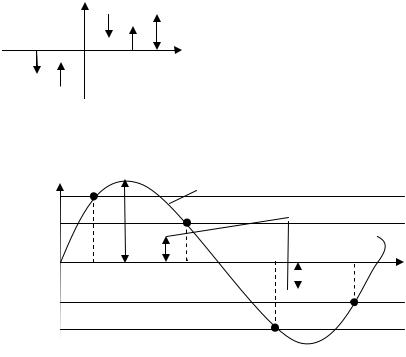
Рассмотрим гармоническую линеаризацию для простой нелинейной зависимости
x2 = F(x1 )
Здесь возможны два случая.
1. Нелинейная характеристика имеет петлю гистерезиса.
В этом случае выходной сигнал будет зависеть от знака производной входного сигнала.
|
|
|
|
|
|
x2 |
|
|
|
|
|
||
-b |
|
|
|
|
|
b |
c |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
|
Рис. 27.1 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||||
Тогда, если на вход действует сигнал |
|
|
|
||||||||||
|
|
|
|
|
|
|
x1 = a sinψ,ψ =ωt |
|
|
(27.8) |
|||
то |
|
|
|
|
|
x |
(t) = q(a,ω)x + |
q′(a,ω) |
px , |
(27.9) |
|||
|
|
|
|
||||||||||
|
|
|
|
|
|
2 |
|
1 |
ω |
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Высшими гармониками ряда в выходном сигнале пренебрегают. |
|
||||||||||||
Коэффициенты гармонической линеаризации |
|
|
|||||||||||
|
|
|
1 |
|
2π |
|
|
|
|
|
|||
q(a,ω) = |
|
∫ F(a sinψ ) sinψ dψ, |
|
|
|
||||||||
πa |
|
|
|
||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|||
′ |
1 |
|
2π |
|
|
|
|
|
|||||
q (a,ω) = |
|
|
|
∫ F(a sinψ ) cosψ dψ, |
|
|
|
||||||
πa |
|
|
|
||||||||||
|
|
|
0 |
|
|
|
|
|
|
||||
2. Нелинейная характеристика не имеет гистерезисной петли. |
|
||||||||||||
В этом случае при x = x1 = a sinψ, |
dx = a cosψ dψ. |
|
|||||||||||
x2 |
|
|
|
|
В интеграле заменим переменную ψ на x. |
|
|||||||
x1 |
Новые пределы интегрирования для переменой x: |
|
ψ = 0 => x = 0, |
||
|
||
|
ψ= 2π => x = 0 |
|
Рис. 27.2 |
|
220
ψ2
q(a) = π2a ∫C sin(ψ )dψ ,
ψ1
где С – амплитуда сигнала на выходе НЗ, q(a) = 2πaC (cosψ1 −cosψ2 ) ,
cosψ = |
|
1 −sin |
2 |
ψ , ψ'2 |
|
|
arcsin |
m b |
< 90 |
0 |
, |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
− cosψ2 = −cos(π −ψ`2 ) = |
1 −sin |
2 |
ψ |
`2 |
= |
|
mb |
2 |
||||||||||||||||||||||||||||||
|
|
1 − |
, |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
q(a) = |
|
2C |
|
|
|
|
|
b 2 |
|
|
|
|
|
mb |
2 |
, |
|
|
|
|||||||||||||||||||
|
πa |
|
|
1− |
|
+ 1− |
|
a |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
ψ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2C |
|
|
|
|
|
|
|
|
|
|
|||||
q`(а) = |
∫C cosψdψ = − |
|
(sinψ1 −sinψ2 ) = |
|||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
πa |
|
ψ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
πa |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
− 2C |
|
|
b |
|
|
mb |
− 2 C b |
(1− m) |
|
|
|
|
|||||||||||||||||||||||||
= |
|
|
|
|
|
− |
|
|
= |
|
|
|
πa2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||
πa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
a |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Частные случаи релейных звеньев |
||||||||||||||||||||||||||
1. m = 1 ,то есть характеристика имеет вид |
|
|
||||||||||||||||||||||||||||||||||||
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этом случае |
|
|
|
g(a) |
|
|||||||||||||||||
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
4C |
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
q(a) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
-b |
b |
|
|
x1 |
|
|
|
|
πa |
1− a2 |
|
|
|
|
|
|
|
a |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q'(a) |
|
|
|
0, |
|
|
|
|
|
|
|
|
b |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 27.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 27.6 |
|
|||
2. m = -1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Сc |
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
q(a) |
|||||||
-b |
|
С |
|
|
q(a) |
|
|
π a |
1 − |
a2 |
|
|
|
|
|
|
|
b |
|
|||||||||||||||||||
b |
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−4 c b |
|
|
|
q`(a) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
q'(a) |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π a2 |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Рис. 27.7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 27.8 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
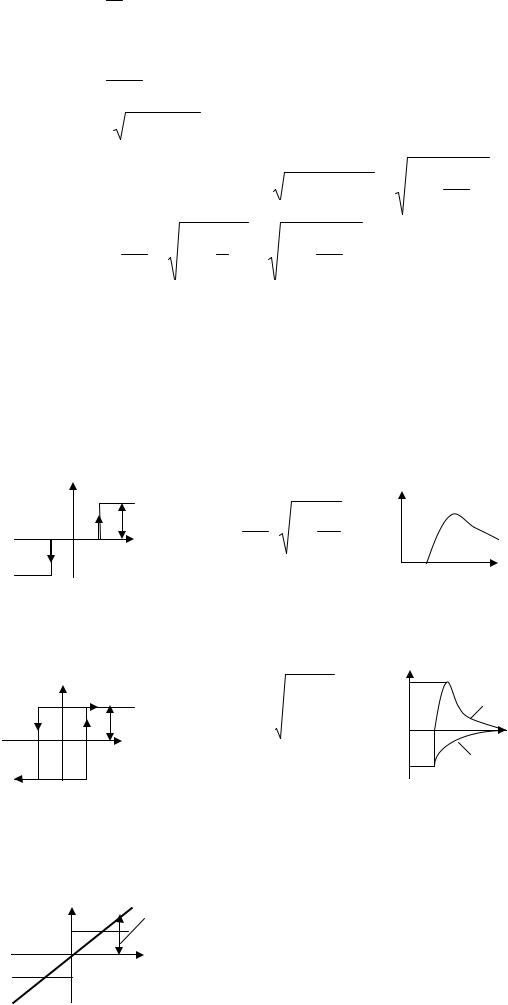
3.b = 0
q'(a)  0.
0.
x2 4С
Сπ
x1
x1=a

|
|
|
221 |
|
q(a) |
|
|
4 c |
q(a) |
|
|
π a |
|
a
Рис. 27.9 |
Рис. 27.10 |
|
Гармоническая линеаризация означает замену ломаной линии некоторой прямой
x |
|
= |
4С |
x |
;если x = a, то |
x |
|
= |
4С |
. |
|
πa |
|
|
|||||||
|
2 |
|
1 |
1 |
|
2 |
|
π |
||
Причем наклон зависит от амплитуды входного сигнала. Чем больше амплитуда входного сигнала, тем более полого располагается прямая, то есть коэффициент q(a) уменьшается с ростом амплитуды входного сигнала. Заменив нелинейное уравнение некоторым линейным, можно анализировать процессы, происходящие в нелинейной системе.
На основе гармонической линеаризации нелинейностей разработано несколько методов. Все они приближенные, так как при этом пренебрегают высшими гармониками в выходном сигнале нелинейного элемента.
27.3. Метод гармонического баланса
Метод разработан Гольдфарбом и относится к числу приближенных методов исследования нелинейных систем. В основе лежит принцип гармонической линеаризации.
Пусть нелинейная система состоит из нелинейного звена, описываемого уравнением
x2 = F(x1 ) |
(27.10) |
и линейной части с передаточной функцией Wл(p), тогда получим структурную схему
Хвх = 0 |
X |
|
X2 |
|
X |
|
|
1 |
Н.З. |
|
Л.Ч. |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 27.11 |
|
Допустим, что в системе существуют автоколебания, то есть |
|
x1 = a sinωпt |
(27.11) |
Тогда сигнал на выходе НЗ может быть представлен в виде ряда Фурье |
|
x2 (t) = F(a sinωпt) = a1 sinωпt +b1 cosωпt +высшиегармоники |
(27.12) |
где ωп - частота автоколебаний в системе.
222
Пусть линейная часть системы обладает фильтрующими свойствами, то есть сигнал x2, проходя через линейную часть системы, теряет все высшие гармоники.
Предположение о том, что линейная часть системы подавляет высшие гармоники, называется гипотезой фильтра. АЧХ линейной части часто имеет вид
2 |
-для нулевого полюса |
А |
|
1- |
|
ω1 |
ω |
3ω1 |
Рис. 27.12
Поэтому сигналы с частотой ω > 3ω1 существенно ослабляются и ими можно пренебречь.
С учетом этого уравнение (27.12) можно записать
x2 (t) = a1 sinωпt +b1 cosωпt = bm sin(ωпt +ϕн ) |
(27.13) |
Сравнивая (27.11) и (27.13) для нелинейного звена, можно увидеть аналогию с линейным звеном. Поэтому, как и для линейных звеньев, вводится понятие комплексного коэффициента усиления Н.З.
|
|
|
|
|
|
|
|
|
′ |
|
Aн (a) e |
jϕН |
(a) |
(27.14) |
|
Wн (a) = q(a) + jq (a) = |
|
||||||||||||
где |
A (а) = bm |
= |
a12 + b12 |
= |
q2 (α) +[q`(α)]2 |
|
||||||||
|
н |
|
|
|
|
α |
|
α |
|
|
|
|
|
|
ϕн(α) = arctg q`(α) |
, |
|
|
|
|
|
||||||||
|
|
|
|
|
|
q(α) |
|
|
|
|
|
|
||
q(a) и q`(a) – коэффициенты гармонической линеаризации |
|
|||||||||||||
|
|
a |
|
1 |
|
2π |
|
|
|
|
|
|
||
q(a,ω) = |
1 |
= |
|
|
|
|
∫ F(a sinψ,aω cosψ) sinψ dψ, |
|
||||||
|
|
|
|
|
||||||||||
|
|
a |
|
πa |
0 |
|
|
|
|
|
|
|||
|
|
b |
|
|
|
1 2π |
|
|
|
|
|
|
||
′ |
|
1 |
= |
|
|
|
|
∫ F(a sinψ,aω cosψ) cosψ dψ, |
|
|||||
|
|
|
|
|
|
|||||||||
q (a,ω) = |
a |
|
πa |
|
||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
||||
где ψ =ω t .
Если нелинейная характеристика F(x1) не имеет петли гистерезиса, то
q`(a) = 0 и φн(a) = 0.
27.4. Условие гармонического баланса
Для нелинейной системы на рис. 27.11 можно записать.