

№146.11.Барщевский
.pdf221
11.2.Оптимизационная модель процесса управления
11.2.1Формирование оптимизационной модели
На основе имитационной модели сформируем оптимизационную модель. Для этого оставим описание объекта управления имитационной модели, как адекватное, а имитационное описание управляющей части заменим на оптимизационное, применив аппарат динамического линейного программирования.
Возможно говорить о двух аспектах ДЛП.
1.Формирование моделей различных частных случаев процесса управления. Сюда относятся модель замены ресурсов. Описание подобных процессов в определенной степени универсально.
2.Изучение свойств процесса управления с использованием ДЛП. Здесь речь идет как о возможных вариантах решения, так и об исследовании управленческих «свойств» и их связи с возможными воздействиями ЛПР.
Первоначально опишем модель процесса замены ресурсов, если такая возможность имеется.
Воспользуемся схемой, представленной на рис. 11.3.
Конструкции |
Продукция |
r |
j |
|
a2 |
ОУ
Комплекты j
Ресурсы
ψ
Рис. 11.3. Иллюстрация процесса замены ресурсов
Введем следующие обозначения. j= 1J – вид продукции; r = 1, R – конструкция (совокупность заменяющих ресурсов); m = 1, M – вид ресурса. Pj, Pr, Pmr – соответствующие планы; Rj – спрос; Сj – цена единицы продукции; Пmr – приоритет ресурса m в конструкции r, arj – норма расхода; bm – наличное количество ресурса. Тогда задача замены получает такой математический вид
J
Σ Сj Pj Æ max,
j = 1
Pj ≥ Rj,
222
J
Σ arj Pj ≤ Pr,
j = 1
M
Pr = Σ Pmr,
m= 1
R
Σ Pmr ≤ bm,
r = 1
R M
Σ Σ Пmr Pmr Æ min.
Другим возможным способом является увеличение в рамках оптимального плана выпуска продукции, обеспеченного ресурсами в противовес продукции с дефицитными ресурсами («перекос» плана) с последующим возвратом к выпуску последнего вида продукции. Поскольку эта задача не относится к оптимизационным, она детально не исследуется [4].
11.2.2 Управление при изменяющихся векторе цели и структурных связях
В главе 9 отмечалось, что динамические переходные процессы в системе имеют место в двух случаях: при количественном изменении спроса и при изменении состава вектора цели системы (рис. 9.7, кривые 6 и 9). Предполагалось, что эти процессы характеризуют устойчивую систему управления.
Вместе с тем, динамизм внешней среды и интенсификация процессов управления могут вызвать нежелательные колебательные и даже неустойчивые переходные процессы [9]. В связи с этим целесообразно исследовать указанные процессы более подробно.
Первоначально покажем, что второй случай (рис. 11.4) сводится к первому случаю введением дополнительного «структурного» возмущения.
Нестационарный режим Ул1 исследуем на базе формального описания (8.31), (8.32) в линейной системе, что позволит выявить фундаментальные свойства системы в “чистом виде”, без наложения нелинейных эффектов. Математической базой для изучения нестационарного режима послужит формальное описание стационарного режима. Исследуем по-прежнему трехуровневую структуру с числом уровней θ = 3 (h = 0, θ) и следующим числом элементов K на уровне h: K3 = K2 = 1, K1 = K0 = K. На границе уровней h = 1 и h = 2 происходит изменение масштаба по коэффициентам, а на границе уровней h = 2 и h = 3 – изменение масштаба по коэффициентам и времени.
Тогда объект управления уровня h = 2 имеет описание
. K
zk(t) = Akzk(t) + Σ Akjzj(t) + Bkuk(t) + B0kU0(t) + wkc(t),
j = 1, j ≠ k
zk(0) = zk0, k = 1, K,
223 |
|
yk(t) = Ckzk(t), |
(11.1) |
где zk, uk, U0, yk, wkc – вектор-столбцы cостояния, управлений на уровнях h = 2 и h = 3, выхода, сигнальных возмущений; Ak, Akj, Bk, B0k, Ck – матрицы подходящей размерности; t – принятый масштаб времени. Если Аkj = В0k = 0, k = fixe при k 1, K, то получается описание объекта управления уровня h = 1.
Для уровня h = 3 объект управления может быть представлен формально в виде
. K
Z0(T) = A0Z0(T) + B0U0(T) + Σ A0kzk(T) + W0c(T),
k = 1
Z0(0) = Z00, Y0(T) = C0Z0(T), (11.2)
где Т – новый масштаб времени, а остальные обозначения те же, что и в выра-
жении (11.1).
При координации уровней h = 3 и h = 2 выражение (11.1) часто записывают в другом масштабе времени
. K
μzk(T) = Akzk(T) + Σ Akjzj(T) + + Bkuk(T) + B0kU0(T) + wkс (T),
j = 1, j ≠ k
zk(0) = zk0, k = 1, K, yk(T) = Ckzk(T), |
(11.3) |
где μ – малый параметр, T = m*t.
Для управляющей части возможна следующая запись.
Уровень h = 1 (Akj = B0k = 0) описывается так:
εk(t) = pk(t) – yk(t), k = fixe,
T
Jkl(T) = 1/2 ∫{εkт(t)Qklεk(t) + ukт(t)Rkluk(t)}dt Æ min, (11.4)
0
где εk, pk – вектор-столбцы отклонения и плана; Qkl, Rkl – неотрицательно и положительно определенные матрицы; l = 1, L; L – количество целевых функций в векторном критерии; т – символ транспонирования.
Для уровня h = 2
εk(t) = pk(t) – yk(t), k = 1, K,
K |
|
Jl = Σ Jkl, l =1, L. |
(11.5) |
k = 1 |
|
Для уровня h = 3
E0(T) = P0(T) – Y0(T),
τ
J0l = 1/2∫{E0т(T)QOlE0(T) + U0т(T)R0lU0(T)}dT Æ min, (11.6)
0
где τ – длительность интервала моделирования; l = 1, L, а остальные обозначения те же, что и в (3.4).

|
|
|
|
225 |
|
|
|
|
|
А |
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
r = I |
|
|
|
Нет |
|
|
Управляемость и на- |
Б |
k k+1 |
k=Kh |
|||
|
|
|
|
|
|||
|
|
блюдаемость |
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
Качество (экспонен- |
|
h h+1 |
Нет |
h=3 |
||
|
|
циальная устойчи- |
|
Б |
|||
|
|
вость) |
|
|
|
|
|
|
|
Устойчивость |
|
|
|
|
Да |
|
|
|
|
|
|
Горизонтальное |
|
|
|
|
|
|
|
|
|
|
|
Чувствительность |
|
|
|
|
согласование |
|
|
|
|
|
|
|
|
|
Точность слежения |
|
|
|
Вертикальное согла- |
||
|
|
|
|
|
сование 1 |
||
|
при скалярном и век- |
|
|
|
|||
|
|
|
|
|
|||
|
|
торном критериях |
|
|
|
Вертикальное согла- |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
сование 2 |
|
Свойства |
|
|
|
Согласование |
||
|
компоненты, |
|
|
|
|
|
|
|
элемента, |
|
|
|
|
|
|
|
уровня |
|
|
|
|
Струк- |
|
|
|
R = I |
Да |
|
|
|
|
|
|
|
Е |
|
Да |
тура преды- |
|
|
|
|
|
|
дущей итерации |
||
|
|
|
|
|
|
|
меня- |
|
|
|
|
|
|
|
лась? |
|
|
Нет |
|
|
|
|
Нет |
|
|
|
|
|
|
|
|
r r+1 |
Нет |
r = R |
|
|
|
|
|
|
|
|
|
В |
|
Да |
Структура |
|
|
Да |
|
|
|
меняется? |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Изучение свойств |
|
|
|
|
|
|
|
элемента уровня |
|
|
|
|
Нет |
Декомпозиция |
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
Конец |
|
|
Б |
|
|
|
|
|
б) |
в) |
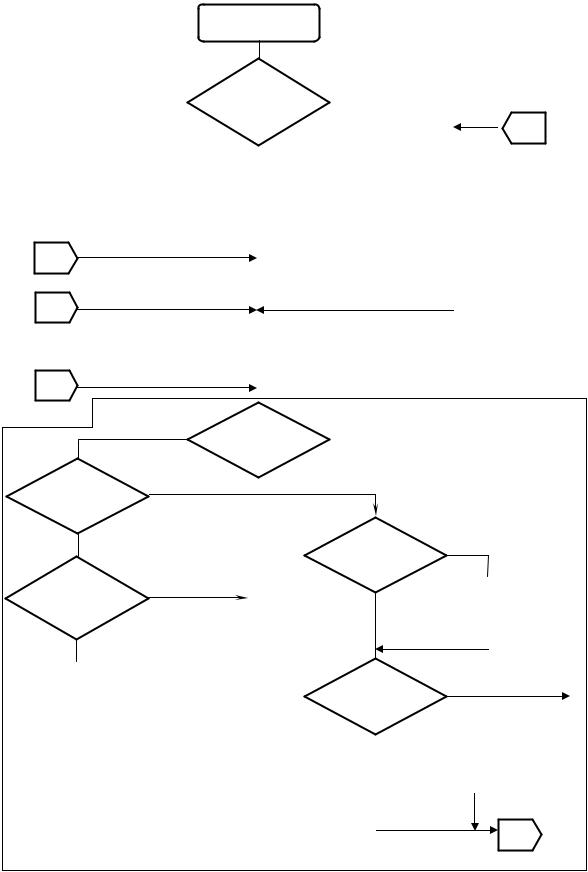
Рис. 11.4.б, в Технология процесса управления системы
226
Возьмем для изучения только уровень h = 2, поскольку для остальных уровней рассуждения будут аналогичны.
Технология исследования процесса может быть представлена в виде ал-
горитма 11.4, в котором выделено дополнительное «структурные» возмущения wk(s)(t) и wr(n)(t).
Фактически для определения “структурных” управлений u (γ)(t) = u (γγ)(t) + uδ(γ)(t), γ ≠ ϕ; ϕ = s или ϕ = n; δ = k или δ = r, а стало быть выходов yδ(γ)(t), для линейной системы достаточно решить уравнение
.
z(γ)(t) = Aδ(γ)zδ(γ)(t) + Bδ(γ)uδ(γ)(t) + wδ(γ)(t). (11.7)
Из его решения u0(γ)(t) = uδ(γ)(t) + uδc(γ)(t) cледует вычесть собственные движения uδc(γ)(t), определяемые из (11.7) при wδc(γ)(t) = 0. Для исследования процессов (11.7) возможно использовать методы изучения стационарного режима, минимизируя длительность β структурного переходного процесса. Очевидно, что zδ(γ)(β) = 0 и начинается стационарный процесс для новой структуры.
Заметим, что на интервале времени β может изучаться и векторное свойство (степень устойчивости, устойчивость по Ляпунову, управляемость, точность, чувствительность).
Таким образом, описание нестационарного процесса управления сведено к описанию стационарного процесса.
Следует сказать, что приведенный математический аппарат описания динамических свойств позволяет проводить анализ и синтез динамических свойств (процессов) при изменениях целей и структурных связей (при прежнем составе структурных элементов) и изменениях структуры (с новым составом структурных элементов и соответствующими связями между ними).
Последняя возможность создает предпосылки для построения, модернизации и реконструкции (появления новых и удаления старых структурных элементов) системы управления (корпоративной информационной системы – КИС).
Перейдем к исследованию стационарного режима Ул0.
11.3. Технология изучения процесса управления
Специфика многоуровневой системы заключается в том, что в критериях ее работы должны быть учтены как экономические, так и управленческие (динамические) характеристики.
В главе 9 больший акцент сделан на экономическую составляющую, рассмотрен лишь один вариант задания динамических характеристик. При этом подробно не обсуждались условия обеспечения характеристик динамического режима, не рассматривались детально следствия неопределенности в получении информации для управляющей части системы. В то же время степень оп-
227
тимизации в значительной мере определяется динамическими характеристиками.
Описание должно позволять учитывать, с одной стороны, алгоритм работы ЛПР, что возможно сделать с помощью имитационной модели, с другой стороны, – интересы структурных элементов с последующим улучшением режимов использования ресурсов, что возможно лишь в оптимизационной модели.
Иными словами, получение данных для модели из реальной системы удобнее осуществлять в рамках имитационной модели, тогда как улучшение характеристик процедуры управления требует наличия модели оптимального управления.
Выходом из создавшегося противоречия является уточненная технология: построение имитационной модели процесса управления с последующим улучшением характеристик процедуры путем перехода к оптимальной модели.
Правила построения описания моделей и пример модели k-го элемента уровня h = 1 приведены в следующей главе.
Желательна возможность использования аналитических методов, что означает фактически асимптотический переход от дискретных имитационных моделей к непрерывным моделям. Одновременно создаются предпосылки для построения оптимальной [9] многоуровневой модели процесса управления с согласованием интересов (целевых функций).
С этой целью перейдем к описанию в пространстве состояний с линейноквадратичным критерием. Такой критерий позволяет учесть:
1)линейную, экономическую аддитивную составляющую, при этом вновь полученный критерий может быть снова приведен к линейноквадратическому варианту с другими числовыми параметрами;
2)корректировку плана и слежение за планом.
Тогда описание процедуры управления получает вид (8.31)–(8.32). Заметим, что если в (8.31)–(8.32) wk(t) = pk(t) = 0, решение ищется в виде
uk(t) = – Kkzk(t),
где Kk – матрица, и замкнутая система описывается уравнением
.
zk(t) = {Аk – BkKk} zk(t) = Gk zk(t).
В выборе собственных значений матрицы Gk или коэффициентов матрицы Kk имеется два направления: модальное управление; оптимальное управление.
При модальном управлении значения матрицы Kk выбирается так, чтобы обеспечить заданное расположение корней матрицы Gk, при этом не учитывается приведенный ранее критерий, а реализация получается сравнительно простой. Однако такое решение неоднозначно, порой избыточно и существенно за-
228
трудняет согласование интересов элементов. В связи с этим предпочтение отдано второму направлению.
В силу рассмотренных обстоятельств описание (8.31)–(8.32) положим в основу исследования свойств многоуровневой системы с помощью предложенной технологии, в которой выделены следующие стадии (рис. 11.4):
1) изучение свойств элементов целиком; 2)исследование свойств элементов по частям, что предполагает выделе-
ние стадий классификации и декомпозиции;
3)координация работы элементов и уровней;
4)управление при оперативно изменяющейся структуре (структурный переходный процесс).
Интенсификация процедур в системе требует оценки и задания для синтеза динамических свойств. В силу сложности системы невозможно определить какой-либо скалярный критерий и, на наш взгляд, следует сформировать векторный критерий (векторное свойство).
Определим векторное свойство, с помощью которого осуществим исследование системы.
Поскольку в конечном итоге динамику в режиме диалога определяет ЛПР, начнем с понятных ему свойств, от которых перейдем к специфическим «автоматическим» свойствам системы. Свойством, с помощью которого ЛПР может задать динамику, является время на устранение отклонения в выполнении плана.
I. Оно связано со степенью устойчивости α (α=3/T, Т = maxjTj,
где T – длительность переходного процесса), определяющей качество функционирования (обеспечивающее экспоненциальную устойчивость). С учетом величины α при фиксированном значении k (и потому индекс k отдельного элемента уровня h = 0 опускается) выражения (8.31)–(8.32) получают вид
.
z(t) = Аz(t) + Bu(t) + w(t), z(0) = z0, y(t) = Сz(t),
ε(t) = p(t) – y(t),
T
J = 1/2e2αtεт(T)Sε(T) + 1/2∫e2αt {εт(t)Qε(t) + uт(t)Ru(t)}dt Æ min, (11.8)
0
где вместо А записано А1. Подставив z1(t) = z(t) eαt, u1(t) = u(t) eαt, y1(t) = y(t) eαt, p1(t) = p(t) eαt, ε1(t) = ε(t) eαt, w1(t) = w(t) eαt, опустив подстрочный символ «1»,
получим выражения, в которых А = А1 – αE, E – единичная матрица соответствующей размерности.
Задание α позволяет обеспечить устойчивость по Ляпунову: показано, что если элемент (8.31)–(8.32) асимптотически устойчив по Ляпунову, то и элемент
229
(11.8) устойчив со степенью устойчивости α. В связи с этим далее рассмотрим вопросы устойчивости для (8.31)–(8.32), т.е. будем осуществлять синтез по α.
II. Для исследования (асимптотической) устойчивости (8.31)–(8.32) чаще всего используется положительно определенная функция Ляпунова (ФЛ), имеющая в данном случае такой вид:
V(z(t)) = zT(t)Hz(t),
где H – квадратная симметричная положительно определенная матрица. Чтобы элемент был устойчив, необходимо, чтобы
.
V(z(t)) = – zT(t)Gz(t),
где G – симметричная положительно определенная матрица. Матрицы H и G связаны уравнением Ляпунова
ATH + HA = – G.
III. Необходимым условием устойчивости является наличие управляемости (наблюдаемости) элемента. Для этого в стационарных элементах должны выполняться условия
rank (A AB … An - 1B) = n,
rank (CT ATCT … (AT)n - 1CT) = n, (11.9)
где n – порядок квадратной матрицы A.
IV. Квадратичная целевая функция (8.32) элемента, гарантируя устойчивость системы, позволяет одновременно обеспечить:
а) минимум ошибки ε(t);
б) минимум стоимости (суммы затрат на управление и потерь из-за отклонений);
в) минимум чувствительности к параметрам и связям.
Действительно, квадратичный критерий является взвешенным (с матри- цами-весами Q и R) критерием.
Если матрица R выбрана, исходя из требований к динамике, то, в соответствии с теорией векторной оптимизации, ошибка ε(t) эффективно минимизируется, если вес матрицы Q много больше (в 50–100 раз) веса матрицы R. В ряде работ матрицу Q предлагается выбирать так, чтобы обеспечить нужное расположение в комплексной плоскости корней характеристического уравнения замкнутой системы по выделенному на этой плоскости сектору или заданной степени устойчивости. Представляется, что алгоритмы такого выбора достаточно сложны для подобных систем.
230
В квадратичной целевой функции (8.32) можно учесть и стоимостную (экономическую) составляющую.
Для элемента (8.31)–(8.32) управление ищется в виде
u(t) = – R-1[BTK(t)z(t) – BTg(t)], (11.10)
где K(t) – решение уравнения Риккати; g(t) – вектор-функция времени. Уравнение Риккати для K(t)
.
K(t) + K(t)A + ATK(t) – K(t)BR-1BTK(t) + CTQC = 0, K(T) = CTSC, (11.11)
функция g(t) находится из выражения
.
g(t) = (- AT + K(t)BR-1BT)g(t) – CTQP(t), g(T) = CTSP(T). (11.12)
При дискретном описании во времени уравнение Риккати
K(t)A – {A-T + A-TQBR-1BT}K(t+ 1) – K(t + 1)BR-1BT K(t + 1) + A-TQA = 0.
Заметим, что решение u(t) при Р(t) = w(t) = 0 позволяет осуществить анализ системы по величине степени устойчивости α. Действительно, α есть наименьшее по модулю значение вещественной части собственных значений характеристического уравнения замкнутой системы F = λE – (A – BR-1BTK), где
E– единичная матрица.
Вобщем случае для решения задачи (8.31)–(8.32) возможно использовать рассмотренные ранее методы векторной оптимизации. На наш взгляд, наиболее подходит метод идеальной точки, решение для которого существует в силу выпуклости целевой квадратичной функции (критерия) и области, определяемой динамическими ограничениями (8.31).
Если для всех l = 1, L выбрана степень устойчивости α, то она сохраняется для критерия компромисса, который фактически имеет более высокую размерность по сравнению со случаем l = 1, и устойчивость элемента обеспечивается в силу отрицательной определенности произвольной функции Ляпунова.
У. Оценку грубости решения (11.10) возможно осуществить с помощью определения чувствительности. Формируются функции чувствительности выхода (или состояния, или целевой функции) элемента (компоненты) к параметрам.
Пусть рассматривается чувствительность состояния z(t) к параметру β. В общем случае (∂u/∂β) ≠ 0) выражения (8.31)–(8.32) трансформируется к виду
.
y(t) = А1y(t) + B1u(t) + w(t), y(0) = y0,
T
J = 1/2δт(T)S1δ(T) + 1/2∫{δт(t)Q1δ(t) + uт(t)Ru(t)}dt Æ min, (11.13)
0