

№146.11.Барщевский
.pdf141
Ф2. Интегрированное планирование. Ф3. Интегрированное управление.
Б. Адаптация системы (изменение структурных связей при оперативном переходе на выпуск новой продукции).
Р1. Модернизация структуры. Здесь выделяют два случая:
1.Изменение только структурных связей;
2.Изменение элементов и структурных связей.
Второй случай (реконструкция) связан с серьезными затратами, рассматривается гораздо реже, чем первый случай, который далее и будет обсуждаться.
Первый случай характеризуется понятием гибкость – способность системы изменять цели функционирования без существенных затрат (реконструкции).
Р2. Интегрированное планирование с учетом «структурной составляющей».
Р3. Интегрированное управление с учетом оперативного перехода на выпуск новой продукции.
Полное, достаточно объемное описание обобщенной модели приведено в работах [4, 9] и приложении 3. Здесь приведем описание лишь процесса управления Ф3:
Mluhl(1) = {Эmh+2(u, th+2) * Эkh+1(u, th+1) *
* Эlh(u, th) * Эlh(y, th) * Эjh(y, th)}, l = 1, K, h = 0, θ, |
(8.1) |
Фф1(S) Æ max, |
(8.2) |
где Эkh+1(u, th+1), Эlh(u, th), Эlh(y, th) – k-е и l-е элементы соответствующих уровней управляющей части и объекта управления; u, y – векторы управления и выхода; th – отсчет времени на уровне h; * – оператор замыкания, учитывающий обратные связи; Kh – количество элементов на уровне h; h = 1, θ; θ – количество
уровней системы; S – связи между элементами Э; l C(k), C(k) = {l: ГЭkh+1 = Эlh,
|C(k)| = Nl, k = 1, Kh+1, l = 1, Kh; j C(l), C(l) = {j: ΓЭjh = Эlh }, |C(l)| = Nj, j = 1, Nj; C(r) = {r: Эrh = Г-1Эkh+1 }, |C(r)| = Nr; Г – прямая связь двух смежных элементов.
На основе обобщенной модели составим обобщенную технологию моделирования системы (приложение 3).
8.3. Обобщенная технология
Общая технология построения математической модели системы, описанная в главе 2, трансформируется в технологию, несколько отличную от ранее описанной (глава 6) для процедурного представления.
Выделяют процессы идентификации, планирования и управления.
В идентификации, в свою очередь, можно выделить следующие этапы: И1. Формирование цели Ц исследования;
142
И2. Определение по выбранной цели моделирования модели M(0): перечня элементов, числа уровней θ, количества Kh элементов на каждом уровне;
И3. Построение структуры. Если число уровней более трех – выделение базовой трехуровневой “скользящей” топологии и переход к ее изучению. При формировании топологии полезно использовать такой порядок: определение топологии объекта управления; последовательное выявление топологии управляющей части;
И4. Определение на документальной основе алгоритмов планирования, описание алгоритмов объекта управления; формирование алгоритмов управляющей части;
И5. Выявление числовых значений параметров σlh, ϕlh, ψlh полученного описания;
И6. Определение адекватности модели исходной системе.
В процессе планирования возможно выделить следующие этапы: П1. Проверка ресурсного обеспечения для выпуска продукции;
П2. Учет векторного критерия с определением чувствительности реше-
ния;
П3. Согласование работы элементов и уровней; П4. Выделение (классификация) сильно связных множеств, определяю-
щих соответствующие компоненты; П5. Декомпозиционное определение оптимальных планов;
ПЛ1. Планирование при оперативно изменяющихся структурных связях. В процессе управления выделяются такие этапы:
У1. Изучение свойств элементов и компонент. По свойствам осуществляется анализ и синтез динамических характеристик системы. Выбор управления (решения) следует проводить по векторному свойству, включающему совокупность экономических и управленческих характеристик (затраты на управление, устойчивость, ошибки и качество управления);
У2. Координация управления элементами и уровнями; У3. Выделение компонент; У4. Использование декомпозиции;
УЛ1. Управление при оперативно изменяющейся структуре.
Нетрудно видеть различия процессов планирования и управления с точки зрения их математического описания.
Теперь следует перейти от обобщенного описания к прикладному описанию системы. Следует найти математический аппарат, одинаково подходящий как для процесса планирования, так и для процесса управления.
Сначала представим такой без учета иерархической структуры системы. 8.4. Единое математическое описание
Для случая медленного изменения спроса (Kсер > 30) на основе концепций
[4, 9] Integrated Computer Aided Manufacturing (ICAM), European Strategic Planning for Research in Information Technology (ESPRIT) и отечественной концеп-
143
ции ГАЗ разработан ERP-стандарт управления с многочисленными частными методами.
Возможное соотношение методов представлено на рис. 8.2.
Повышение конкурентоспособности
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Расчетные методы |
|
|
Организационныеметоды |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Канбан |
MRP |
BPR |
CPR |
CPI |
MRPII
|
|
|
|
APS |
|
ERP |
|
|
|||
|
|
|
|
|
|
|
|
CSRP
Точно
вовремя
Рис. 8.2. Соотношение методов ERP-стандарта
ERP-системы (BAAN, SAP R/3, Галактика, Парус, БОСС) предоставляют руководителям текущую информацию с помощью информационной системы и позволяют ускорить различные расчеты, в том числе – плановые.
Как ранее отмечалось, ERP-системы не позволяют успешно работать при быстро изменяющихся спросе, цене, ресурсном обеспечении.
Место методов математического описания показано на рис. 8.2. В правой ветви отражены методы BPI – Business Process Improving (выявление узкого места), CPI – Continuous Process Improving – повышение качества продукции по критериям качества потребителей, но не увеличение прибыли любой ценой, BPR – Business Process Reingineering. Эти методы носят частный характер и не могут рассматриваться как системные методы.
144
Основной особенностью выделенного класса задач систем управления является высокая динамичность свойств в силу динамичности параметров среды, определяющих цель работы системы.
Без анализа динамики интуитивный алгоритм работы ЛПР или компьютера – при переходе на выпуск новой продукции – может привести к сильным колебательным процессам.
Следует добавить, что ранние работы по теории АСУ [1–5] направлены на автоматизацию документооборота фактически для разомкнутых систем и на задачи оптимального планирования, предназначенные для плановой экономики.
Иерархический характер бизнес-процессов планирования и управления имеет две трактовки:
1.Иерархия самих процессов, что характерно для процедурного представления в зарубежных ERP-системах. Организационная структура при этом – «плоская» с минимальным количеством уровней;
2.Иерархическая организационная структура, характерная для отечественных производств. Структура процессов по-прежнему остается иерархической.
Дальнейшее изложение ориентируется на первую трактовку, хотя оно пригодно и для второй трактовки.
Кформальным методам, используемым в обобщенной технологии, следует предъявить такие требования:
1) достаточная адекватность описания процессов в реальных системах;
2) полное использование возможностей компьютерной техники;
3) возможность поддержания рациональных режимов работы системы; 4) простота и универсальность алгоритмов, реализующих эти режимы; 5) более компактный спектр используемых методов, стремление к одно-
родному аппарату описания процессов; 6) возможность описания процессов в иерархической структуре;
7) учет понятия “экономический интерес”;
8) возможность описания стационарного и нестационарного режимов;
9) учет динамики системы.
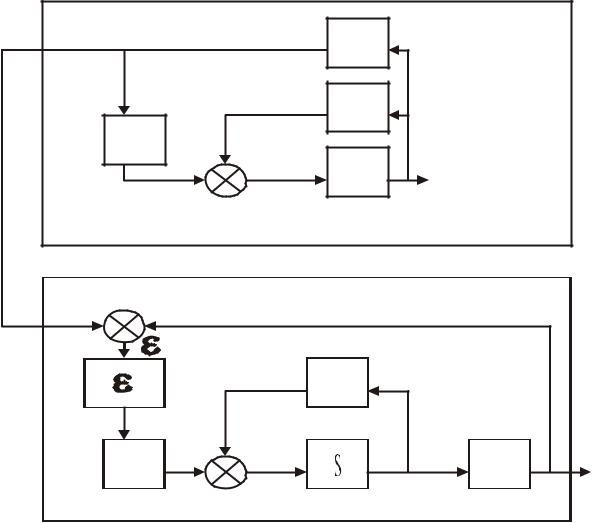
Единый аппарат описания для одного уровня может в общем случае иметь следующий вид (рис. 8.3).
Объект управления
.
z(t) = Az(t) + Bu(t),
y(t) = Cz(t),
G(p(t),u(t)) ≤ b(t), |
(8.3) |
управляющая часть
ε(t) = p(t) – y(t),
145
T T
J = - ∫<C3, p(t)> dt + ∫{<C1, ε(t)> + <C2, u(t)>} dt Æ min, (8.4) |
|
0 |
0 |
где p, z, u, y, ε, b – векторы плана, состояния, управления, выхода, отклонения, ресурсов; A, B, C – матрицы, характеризующие динамику; G – функция; С3 – стоимостная оценка плана (например, прибыль); С1, С2 – потери за счет отклонения от плана и потребности в дополнительных ресурсах для управления; Q, R – симметричные матрицы, характеризующие процесс управления. Величина y(t) может быть либо смоделирована, либо получена из реальной системы.
|
AП |
|
p(t+ h) |
Z-ih |
G p(t) |
p = U П |
J П |
Планирование |
ВП |
|
|
p + |
- |
|
Управление |
|
|
||
J ( |
,U ) |
A |
|
|
U |
|
|
|
B |
|
C |
|
. |
Z |
y |
|
Z |
|
|
Рис. 8.3. Единая математическая модельмногоуровневой системы управления
Действующие возмущения возможно представить так
R(t) = Rc(t) + R*1(t – θ), (8.5)
j
R(t) = R*1(t – Σθm), (8.6)
m = 1
b(t) = bc(t) + b*1(t – θ), (8.7)
146
c(t) = cc(t) + c*1(t – θ), (8.8)
Данная модель охватывает все возможные режимы и варианты описания. Действительно, из (8.4) следует, что процесс управления в многоуровневых системах может быть декомпозирован на процесс планирования (целепола-
гания) и (собственно) управления.
При планировании вектор возмущений ξ(t) не учитывается и потому ε(t) = u(t = 0, p(t) = y(t), z(t) = P(t) и описание получает вид (статический план)
.
P(t) = AP(t),
p(t) = CP(t),
G(p(t)) ≤ b(t),
T
J= - ∫<C3, p(t)> Æ min,
0
или
P(t) = P(t – 1) + p(t), P(0) = 0,
p(t) = CP(t), G(p(t)) ≤ b(t),
T |
|
J= – ∫<C3, p(t)> Æ min, |
(8.9) |
0 |
|
где p(t) – ежедневный план или размер запускаемой партии; P(t) – план с накоплением (например, с начала месяца).
Таким образом, описание процесса статического планирования для одного уровня (h = 3)
P(T) ≤ R(T),
AP(T) ≤ b(0),
F = <C, P(T)> Æ max, (8.10)
что эквивалентно
Pj(T) ≤ Rj(T), j = 1, J,
J
Σ aψj Pj(T) ≤ bψ(0),
j = 1
J
Σ Cj Pj(T) Æ max.
j = 1
147
где R(T) – вектор спроса; P(T) – вектор искомого плана, A = {aψj} – матрица норм расхода ресурсов вида ψ = 1, Ψ; b(0) – вектор наличного количество ресурсов; C – вектор прибыли от единицы продукции; j = 1, J – вид продукции; T – время.
Последнее выражение в терминах Р. Габасова [16] получает вид
P(T) =P(0) + p[T], P(0) = 0,
AP(T) ≤ b(0),
P(T) ≤ R(T),
F = CT P(T) Æ max, (8.11)
где надстрочный индекс T – признак транспонирования.
Для описания процесса планирования могут быть использованы методы (статического) линейного планирования и динамического линейного планирования (ДЛП).
Для описания процесса управления возможно использовать методы моментов, линейно-квадратичного оптимального управления и ДЛП.
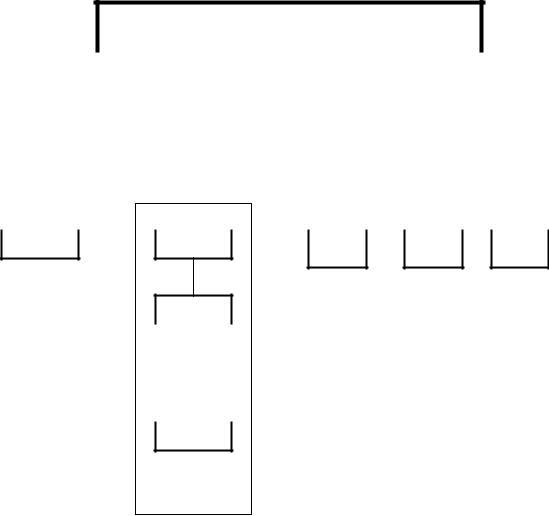
Реальная система имеет (рис. 8.4) три уровня: руководство производства (h = 3), диспетчер (h = 2) и начальники цехов (h = 1).
Для уровня h = 1 процесс планирования записывается
J
Σ aψjk Pjk(ti) ≤ bψk(ti - 1),
j= 1
J
Σ amjk Pjk(ti) ≤ bmk(ti - 1), j = 1
I
Σamjk Pjk(ti)|k =1 ≤ bm(0),
i= 1
I
Σ Pj(ti)|k =K ≤ Pj(T),
i= 1

148
149
J I
Fk = Σ Σ Cjk Pjk(ti) Æ max, (8.12)
где m = 1, M – виды материальных ресурсов; ψ = 1, Ψ – виды прочих ресурсов; i = 1, I – моменты времени; k = 1, K – номер подразделения.
Для уровня h = 2 вторая и последняя строки выражения (8.12) трансформируются
I |
I |
Σ amjk Pjk[ti] ≤ Σ Pm,k – 1[ti – 1], |
|
i = 1 |
i = 1 |
K
F = Σ Fk Æ max.
k= 1
В терминах Р. Габасова [16] выражение (8.12) получается следующим
Fk = CkT Pk (T) Æ max,
Pk(ti) = Pk(ti – 1) + pk[ti],
Ak Pk(ti) ≤ bk(ti - 1),
Ak Pk(T) )|k =1 ≤ bk(0),
Ak Pk(T) )|k = K ≤ P(T), (8.13)
при
I
Pk(T) = Σ pjk[ti].
i= 1
Несмотря на присутствие времени в последнем выражении оно отражает статическое планирование, поскольку выполнение плана считается мгновенным.
Выражение (8.9) описывает статический вариант плана, который рассчитывается задолго до своей реализации.
Вто же время в адаптивных автоматизированных системах параметры могут меняться в соответствии с выражениями (8.5)–(8.8), а процесс планирования осуществляется во время работы системы и потому становится динамическим (инерционным). Для описания такого процесса возможно использовать метод моментов [17], линейно-квадратичную оптимизацию [9] и динамическое линейное программирование [16]. Первые два метода относятся к методам оптимального управления и для описания процесса планирования избыточны. В связи с этим используем динамическое линейное программирование.
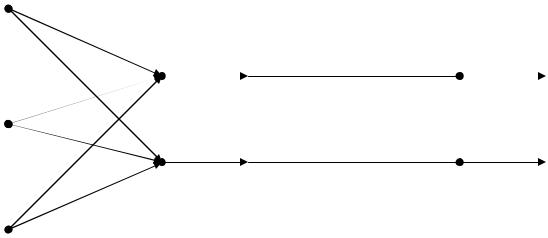
Вэтом случае описание процесса планирования может иметь вид
(рис. 8.5)
150
H(t) = H(t – 1) + [t](u[t] – p[t]), H(0) = H0,
P(t) = P(t – 1) + p(t), P(0) = 0,
p(t) = CH(t),
Ap(t) ≤ b(t),
P(T) ≤ R(T),
T
J= - ∫<C3, p(t)> Æ min,
0
где H, p – незавершенное производство и ежедневный план, u – запуск комплекта материалов в производство, R – спрос, изменяющийся по закону (8.5) или (8.6), A – матрица норм расходов, b – наличное количество ресурсов, С – длительность технологического цикла.
|
ОУ |
|
Комплекты |
a2 |
Продукция |
|
||
j |
|
j |
|
|
|
Ресурсы
ψ
Рис. 8.5. Иллюстрация процесса планирования
Выражение (8.9) доказывает возможность сочетания аппаратов линейного программирования и оптимального управления.
Нетрудно заметить, что модель представляет собой систему методов динамического линейного программирования (ДЛП) и оптимального управления (ОпУ). Возможны следующие сочетания этих методов:
1)ОпУ – ОпУ;
2)ОпУ – ДЛП;
3)ДЛП – ОпУ;
4)ДЛП – ДЛП.