

№146.11.Барщевский
.pdf391
Приложение 10
Основные предпосылки применения динамического линейного программирования для описания процесса управления
Напомним, что ранее доказана правомерность применения динамического линейного программирования для процесса планирования в целенаправленных многоуровневых автоматизированных системах.
Полезно в связи с этим определить возможности использования аппарата динамического линейного программирования для исследования процесса управления в автоматизированных системах. Успех такого применения позволил бы сформировать универсальный однотипный математический аппарат для совместного изучения как процесса планирования, так и процесса управления.
Вместе с тем использование ДЛП для оценки и синтеза динамических свойств в организационно-экономических системах связано с серьезными сложностями.
Одной из них является противоречивость в условиях обеспечения экономических и динамических свойств системы.
Линейная целевая функция следящей системы хорошо учитывает экономическую составляющую. В то же время эта целевая функция плохо «работает» при колебательном переходном процессе. Замена в этом случае слагаемых критерия их абсолютными значениями резко усложняет вычисления, для которых к тому же отводится ограниченное количество времени. Кроме того, колебательный переходный процесс крайне нежелателен с позиций ЛПР.
Таким образом, при решении проблемы применения ДЛП возникают, как минимум, две задачи:
1)обеспечение неколебательного переходного процесса как для отдельных элементов, так и для системы в целом;
2)исследование динамических свойств для таких переходных процессов.
Для решения первой задачи заманчиво привлечь математический аппарат модального управления, который в [25] использован для управления по состоянию. Неоднозначность выбора параметров в модальном управлении создает предпосылки для последующей оптимизации при использовании линейного критерия.
В[25] управление модами (корнями характеристического управления замкнутой системы) осуществляется с помощью изменения коэффициента обратной связи при статическом регулировании.
Вто же время для изучаемой адаптивной автоматизированной системы следует рассматривать следящий (за планом) режим. В этом случае коэффициент обратной связи влияет на длительность переходного процесса, установившуюся величину выходной переменной и установившуюся ошибку слежения.
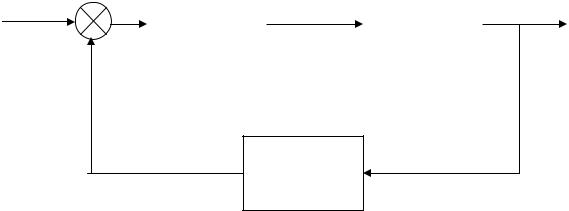
Иллюстрируем сказанное, не снижая общности, на примере одномерной системы (рис. П10.1), для чего используем передаточные функции. Чаще всего
392
объект управления в организационно-экономических системах описывается ка инерционный первого порядка.
p |
ε |
|
u |
|
y |
|
k1 |
k/(Ts + 1) |
|||||
|
|
|||||
|
|
|
|
|||
|
|
|
|
|
|
kОС
Рис. П10.1. Статическое регулирование
Тогда
y(s)/p(s) = k1*(k/(Ts + 1))/{1 + [k1*(k/(Ts + 1))*kОС]} =
= k1*k/(Ts + 1 + k1*k*kОС),
где p, u, y, ε – переменные входа, управления, выхода и ошибки; k1, k, kОС – коэффициенты усиления управляющего устройства, объекта управления и обратной связи; T – постоянная времени; s – символ преобразования Лапласа.
В установившемся режиме при единичном входном сигнале (s = 0)
y(∞) = k1*k/(1 + k1*k*kОС) < 1
при значении kОС ≤ 1. Установившаяся ошибка
ε(∞) = 1/(1 + k1*k*kОС) ≠ 0.
Ктому же обеспечить высокие значения коэффициентов, как показывает имитационное моделирование, иногда трудно.
Таким образом, возможности статической системы ограничены.
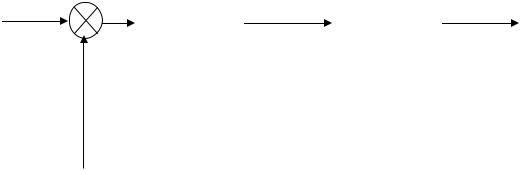
Более перспективны в этом случае астатические системы, имеющие в своем составе хотя бы одно интегрирующее звено (рис. П10.2).
Вэтом случае
y(s)/p(s) = (1/Tиs)*(k/(Ts + 1))/{1 + [(1/Tиs)*(k/(Ts + 1))]} =
= k/(TTиs2 + Tиs + k),
где Tи – время интегрирования.
|
|
|
393 |
|
|
|
p |
ε |
|
u |
|
|
y |
1/Tиs |
k/(Ts + 1) |
|
||||
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. П10.2. Астатическое регулирование
Характеристическое уравнение замкнутой системы имеет вид
TTиs2 + Tиs + k = 0
и корни
s = (– Tи ±[Tи2 – 4TиTk]1/2)/2TиT.
Здесь возможен колебательный процесс. Очевидно, что корни вещественны (переходный процесс без перерегулирования), если
Tи2 – 4TиTk ≥ 0
и при Tи ≠ 0
Tи ≥ 4Tk.
Чем больше Tи, тем меньше колебательность, однако и длительность переходного процесса увеличивается. Это подтверждается и числовыми экспериментами на ПК с имитационной моделью при использовании электронных таб-
лиц Excel (глава 13).
Отметим, что процессы в имитационной модели (глава 11) могут быть описаны в первом приближении и с помощью преобразования Лапласа.
Действительно
z(ti) = z(ti - 1) + [t]*(u[ti] – y[ti]), y[ti]) = z(ti - 1)/a2
или
a2y[ti + 1] = a2y[ti] + [t]*(u[ti] – y[ti]),
(a2{y[ti + 1] – a2y[ti]}/[t]) + y[ti] = u[ti].
При [t] Æ 0 получим
a2dy/dt + y(t) = u(t)
или
(a2s + 1)y(s) = u(s).
Аналогичный процесс имеет место при определении скользящих средних. В свою очередь
v3(ti) = v3(ti – 1) + [t]{p[ti] – y[ti]}
определяет интегрирующее звено
dv3/dt = p(t) – y(t) = ε(t), v3(s) = ε(s)/s.
394
395
396
397

Учебное издание
Барщевский Евгений Георгиевич Румянцева Галина Николаевна Чертовской Владимир Дмитриевич
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
ПРОБЛЕМЫ И ПЕРСПЕКТИВЫ
Учебное пособие
Печатается в авторской редакции
Подписано в печать 06.09.11 |
Сдано в |
производство 06.09.11 |
|
Формат 60×84 1/16 |
Усл.-печ. л. 23,13. |
Уч.-изд. л. 27,86. |
|
Тираж 100 экз. |
Заказ № 146 |
||
Санкт-Петербургский государственный университет водных коммуникаций 198035, Санкт-Петербург, ул. Двинская, 5/7
Отпечатано в типографии ФБОУ ВПО СПГУВК 198035, Санкт-Петербург, Межевой канал, 2