

Схемы применения подготовительных функций g17-g19 и g02, g03/
Траектория инструмента по дуге окружности (рис. 5, в) задается у разных УЧПУ по-разному. Это зависит от устройства интерполятора, от характера его работы как вычислительного устройства, поскольку в общем задача сводится к вычислению определенных параметров при наличии определенных (исходных) данных.
В общем случае дуга на плоскости (в системе координат) может быть определена следующими данными (рис. 5, г). центром С с координатами Xc и Yc, радиусом R, начальной точкой Ро с координатами Хо и Yо, конечной точкой Р1 с-координатами х1 и у1, центральным углом дуги θ и углом а между касательной к начальной точке и осью (в данном случае осью X). Для того чтобы однозначно определить дугу на плоскости, все эти данные приводить в программе нет необходимости. Обычно при выборе параметров, задающих интерполяцию, исходят из того, что известно положение начальной точки Ро Дуги. Это естественно, поскольку приход в эту точку инструмента обусловлен предыдущими кадрами УП.
В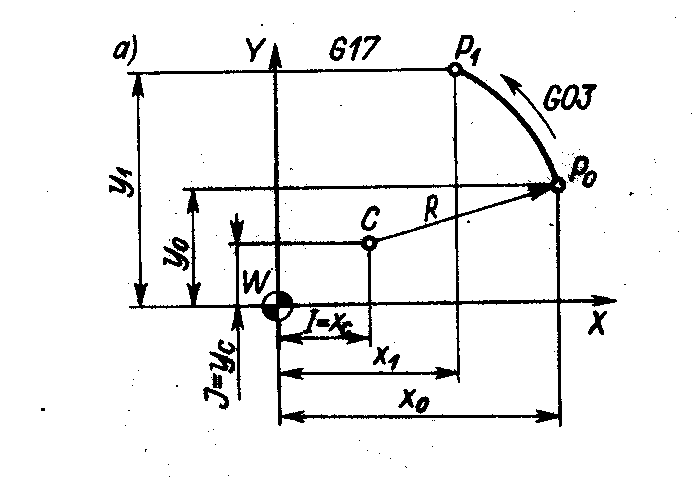 полярной системе координат (рис. 5, д)
траектория задается функцией (G02 или
G03), радиусом К и координатами центра
С дуги относительно начальной точки
Р0, т. е. значениями I, J ('при G17) с
соответствующими знаками, и углом (по
адресу С).
полярной системе координат (рис. 5, д)
траектория задается функцией (G02 или
G03), радиусом К и координатами центра
С дуги относительно начальной точки
Р0, т. е. значениями I, J ('при G17) с
соответствующими знаками, и углом (по
адресу С).
В прямоугольной системе координат при задании последних абсолютными размерами наиболее распространен способ задания дуги координатами конечной точки и центра дуги (рис. 6, а). Координаты конечной точки Р1 указывают с адресами Х и У, а координаты центра С дуги — с адресами I и J (для плоскости ХОУ). Функция G03 определяет направление интерполяции., При таком задании параметров интерполятор достаточно просто вычисляет радиус дуги и выдает команды на движение. Фрагмент кадра на интерполяцию будет иметь вид:
G17G90GОЗХ{х1}Y{y1}I{xc}J{yc}
В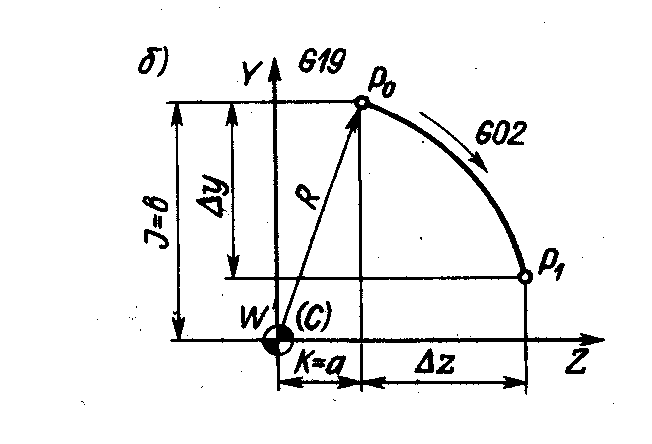 одном из вариантов задания круговой
интерполяции в приращениях для определения
параметров интерполяции центр W’
принятой системы координат условно
размещают в центре дуги С (рис. 6, б). В
кадре, задающем интерполяцию, с
адресами J и K (для плоскости YOZ) задаются
координаты начальной точки P0 (а и b)
в принятой условной системе координат.
Эти координаты определят проекции
радиуса дуги (R2=a2+b2). По адресам Y и Z будут
записаны относительные перемещения по
осям от начальной точки P0 с учетом знаков
движения относительно направления осей
(для принятого примера — минус по
оси Y и плюс оси Z). Фрагмент кадра,
определяющий круговую интерполяцию,
будет иметь вид
одном из вариантов задания круговой
интерполяции в приращениях для определения
параметров интерполяции центр W’
принятой системы координат условно
размещают в центре дуги С (рис. 6, б). В
кадре, задающем интерполяцию, с
адресами J и K (для плоскости YOZ) задаются
координаты начальной точки P0 (а и b)
в принятой условной системе координат.
Эти координаты определят проекции
радиуса дуги (R2=a2+b2). По адресам Y и Z будут
записаны относительные перемещения по
осям от начальной точки P0 с учетом знаков
движения относительно направления осей
(для принятого примера — минус по
оси Y и плюс оси Z). Фрагмент кадра,
определяющий круговую интерполяцию,
будет иметь вид
G19G91G02Y-{Dy}Z+{Dz}J{b}K{a}
О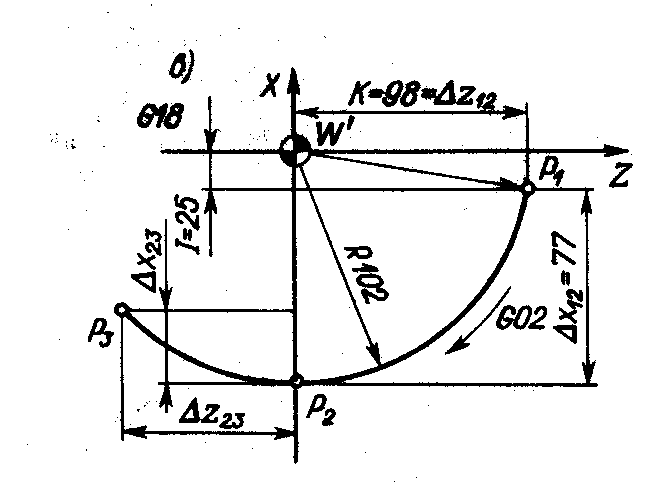 пределенные
УЧПУ предусматривают задание в одном
кадре -информации о части дуги,
расположенной только в одном квадранте.
Если дуга расположена в двух квадрантах,
то она описывается двумя кадрами,
если в трех — тремя и т. д. При размещении
дуги в двух квадрантах (рис. 6, в)
фрагменты кадров УП могут иметь следующий
вид:
пределенные
УЧПУ предусматривают задание в одном
кадре -информации о части дуги,
расположенной только в одном квадранте.
Если дуга расположена в двух квадрантах,
то она описывается двумя кадрами,
если в трех — тремя и т. д. При размещении
дуги в двух квадрантах (рис. 6, в)
фрагменты кадров УП могут иметь следующий
вид:
G18G91G02X-77Z-98.125K98
X+{Dx23}Z-{Dz23}I102K0
О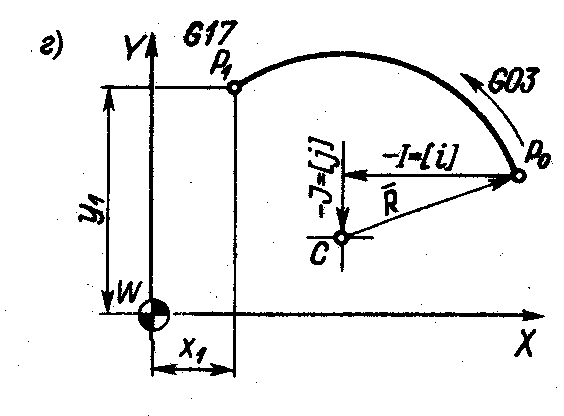 тметим,
что в некоторых УЧПУ после адресов I и
К приводятся абсолютные значения
величин, т. е. со знаком «плюс». При.
векторном способе (рис. 6, г) под адресами
интерполяции указывают численные
значения и направления (относительно
осей координат) векторов, проведенных
из начальной точки дуги в ее центр,
и координаты (или приращения) конечной
точки дуги. Кадр интерполяции при таком
способе может иметь .вид:
тметим,
что в некоторых УЧПУ после адресов I и
К приводятся абсолютные значения
величин, т. е. со знаком «плюс». При.
векторном способе (рис. 6, г) под адресами
интерполяции указывают численные
значения и направления (относительно
осей координат) векторов, проведенных
из начальной точки дуги в ее центр,
и координаты (или приращения) конечной
точки дуги. Кадр интерполяции при таком
способе может иметь .вид:
G90G03X{x1}Y{y1}I-{i}J-{j}
Однако несмотря на разнообразие способов задания параметров интерполяции все они сводятся к единой обшей расчетной схеме, обеспечивающей определение радиуса дуги (если он не задан) по заданным элементам I, J, K.
Кодирование элементов круговой траектории.
Определенные правила записи в УП существуют также при задании функции С06 (параболическая интерполяция) и при программировании линейно-круговой интерполяции (ГОСТ 20999—83).