

117.2 Исполнительные приводы
В промышленности в качестве исполнительных органов используются приводы. Приводы бывают электрические, гидравлические, пневматические, газовые, комбинированные.
1. Пневматические приводы
Пневматический привод одной степени подвижности состоит из исполнительного двигателя, распределительного устройства (РУ) и дросселей - регуляторов скорости. В качестве РУ используются 2-х и 3-х позиционные золотники и клапаны. В блок питания входит аппаратура подготовки воздуха и редуктор.
2. Гидравлические приводы
Гидравлический привод состоит из гидроцилиндров, гидроусилителя, датчика положения и предназначен для осуществления поступательных движений исполнительных механизмов, работающих по программе, поступающей на вход привода.
3. Электроприводы
По сравнению с другими типами приводов их отличает: простота эксплуатации, отсутствие трубопроводов, низкий уровень шума при работе, отсутствие загрязнений. Характерно применение новых типов электродвигателей с печатным цилиндрическим или дисковым ротором, с гладким ротором, с линейным движением.
Наиболее важными характеристиками электродвигателя (ЭДВ) являются механическая характеристика (статическая), т.е. зависимость скорости вращения ЭДВ от момента на валу двигателя, определяющая жесткость привода, а также динамическая характеристика, определяющая быстродействие и качество переходного процесса. Используются электроприводы как дискретного, так и непрерывного действия.
При релейном управлении используются электродвигатели переменного тока.
Изменение скорости вращения ЭДВ постоянного тока осуществляется включением гасящих сопротивлений в цепи якоря двигателя, а для ЭДВ переменного тока - путем переключения пар полюсов. Чтобы ослабить влияние внешних возмущающих воздействий в приводах необходимо иметь максимально жесткую характеристику. Однако в случае обеспечения чувствительности к внешним входным воздействиям используется способ управления усилием привода по рассогласованию между фактическим и заданным положением. Схема управления для этого случая имеет вид:
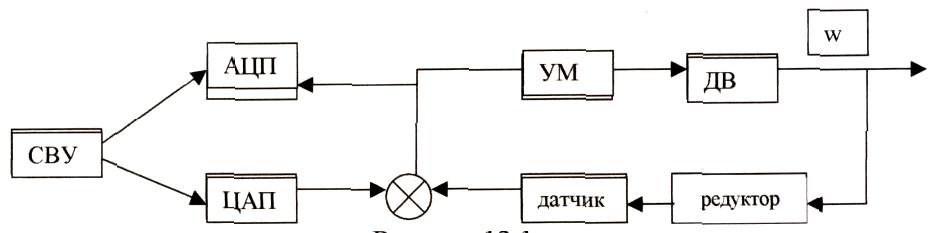
Рисунок 12.1
СВУ - специализированное вычислительное устройство;
УМ - усилитель мощности;
ДВ - двигатель.
Механическая характеристика двигателя может иметь вид:

Рисунок 12.2
Унифицированный ЭП включает электромеханический модуль, блок управления приводом и блок УМ. Электромеханический модуль включает исполнительный двигатель постоянного и переменного тока, механическую передачу от исполнительного двигателя к выходному валу, датчик положения выхода вала и датчик скорости.
В унифицированных ЭП могут быть использованы отечественные электродвигатели обычного исполнения типа СД (синхронные двигатели), ДМ, СЛ, ДВИ; с улучшенными характеристиками: с гладким якорем, ДПГ, МИГ; с полым ротором: ДПР, ДГЦА, ДПЯ и с дисковым ротором ПЯ. Зарубежные с полым ротором: «Максилирайтор» фирмы Портер (США); с дисковым якорем СЕМ (Франция); с гладким якорем «Минерция» фирмы Яскава электрик (Япония); высокомоментные двигатели фирмы Лукас (США), Фанук (Япония).