

Блок (узел) микропрограммного управления (бму).
БМУ - узел микропроцессора, предназначенный для выработки последовательности адресов микрокоманд, считываемых из управляющей памяти для выполнения микро команды или управляющей директивы.

Рисунок 8.6 - БМУ
БМУ состоит из:
1. Рг адреса микро команды, в котором хранится адрес текущей микро команды в течение времени, необходимого для выполнения данной микро команды в процессорном элементе и формирования адреса следующей микро команды.
2. выходные буферы обеспечивающие электрическое сопряжение с управляющей памятью, а также благодаря наличию режима третьего состояния позволяет обеспечить подключение к одной и той же управляющей памяти нескольких блоков ЕМУ.
3. логические схемы определения адреса следующей микро команды. Данная схема формирует адрес следующей микро команды в зависимости от адреса текущей микро команды состояния зоны следящего адреса текущей микрокоманды состояния, триггера внешних условий.
В начальный момент времени по сигналу ЗМ заносится в регистр адреса код операции К0 - К7, который, как правило, является начальным адресом микро программы, необходимой макро команде ЗУ (управляющей памяти) обычно представляется как 1-, 2 -, массив микро команд.
Разработка ЕМУ (логическая схема определения адреса следующей микро команды) базируется на формировании определённого числа переходов в пределах массива адресов памяти.
На основании содержательного анализа избранных типов переходов формируется таблица, отражающая правила формирования адреса строки и колонки. По данной таблице строится схема формирования адреса следующей микро команды.
Логическая схема, определения адреса следующей микро команды строится на основании MS-b, программируемых логических схемах, ПЗУ.
Области применения: устройства управления программами, построение быстродействующих контроллеров.
Построение быстродействующих контролеров на основе БМУ и ПЗУ Типовым процессом проектирования является:
1. анализ объекта управления.
а) изучение состава датчиков входной информации.
б) изучение состава исполнительных элементов.
в) изучение состава или разработка алгоритма работы объекта управления.
г) изучение состава динамических характеристик объекта управления, датчика входной информации и исполнительных элементов.
д) изучение состава динамической и статической точности системы управления.
е) анализ конструктивных требований.
2. оценка возможностей исполнения типового варианта контроллера.
3. формирование
взаимосвязей «объект управления»
![]() «контроллер».
«контроллер».
4. разработка программ работы контроллера.

Рисунок 8.7 - Типовая структура контроллера
8.2 Эмуляция системы команд (архитектуры) микро эвм посредством программирования
Эмуляция системы команд, принадлежащей ЭВМ означает, что ее машинный язык будет адекватно связан с другой машиной на уровне микропрограммирования, при этом на данной вычислительной машине может быть использован весь программный запас, разработанный на предыдущей вычислительной машине, требуется значительного уменьшения времени на создание программного обеспечения, в одной вычислительной машине можно реализовать несколько систем команд.

Рисунок 8.8 - Эмуляция системы команд
Существует 3 способа эмуляции системы команд:
1. использование КОП команды непосредственно в качестве начала микропрограммы.
Достоинства: простота реализации. Недостатки: отсутствие необходимой корреляции между кодами операций и рациональным разбиением управляющей памяти.
2. использование косвенной адресации. Достоинства: более рациональное использование памяти. Недостатки: снижение быстродействия.
3. помещение таблицы: переходов в дополнительное ПЗУ. Достоинства: максимальное быстродействие. Недостатки: лишние аппаратные затраты.
Структурные методы повышения быстродействия микроЭВМ.

Рисунок 8.9 - Временные диаграммы взаимодействия основных узлов
микроЭВМ
Ni - ссылка на адрес следующей микро команды
Сi - разряд, управляющий работой ПЭ
Si - информация о состоянии ПЭ
Аi - адрес текущей микро команды
tA - время установки RG адреса в БМУ
tNC - время реакции УП на адрес поступающий из БМУ
tS- время с момента выработки сигнала Q до окончания выполнения операции в ПЭ
tm - время установки RG хранения результата операции.
Конвейерная обработка информации

Рисунок 8.10 - Конвейерная обработка информации
В системе с конвейерной обработкой информации имеют место 2 параллельных процесса:
1. формирование адреса следующей микро команды.
2. выполнение операций в процессорном элементе.
При этом задержки tS и tNC совмещаются, а задержки установки RG tA и конв. RG примерно одинаково. При этом быстродействие увеличивается в 1.5-1.8 раза.
Достоинства: увеличение быстродействия при минимальных аппаратных затратах. Недостатки: наличие фазового сдвига в тех участках вычислительного процесса, в которых проводится анализ состояния процессорного элемента.
Для устранения данного недостатка используются "длинные" команды, которые занимают 2 такта.
Многоуровневая конвейерная обработка

Рисунок 8.11 - Многоуровневая конвейерная обработка
В данном случае имеет место процессор с повышенным быстродействием и управляющим памятью с относительно низким быстродействием. Устанавливается конвейер из такого количества RG, во сколько раз процессор по своему быстродействию выше, чем быстродействие управляющей памяти.
Достоинства: максимальное быстродействие при минимальных аппаратных затратах. Недостатки: наличие фазового сдвига в тех участках вычислительного процесса, в которых оценивается состояние ПЭ, для исключения недостатка во все RG записывается одна и та же микро команда, или работа всего устройства идет через регистр Рri.
Память с расслоением.
В этом случае выбирается столько слоев в памяти во сколько раз быстродействие ПЭ больше быстродействия управляющей памяти.
Достоинства и недостатки те же. Недостатки устраняются путем записи одной и той же команды в 2-х ячейках памяти.
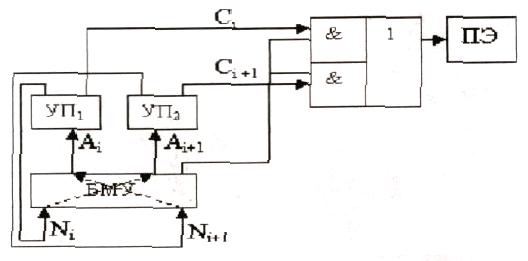
Рисунок 8.12 - Схема памяти с расслоением
Вычислительные системы с переменной длительностью цикла
1 - это логические операции.
2 - арифметические операции без формирования признаков состояния.
3 - арифметические команды с анализом, и формированием признаков.
В структуру микро команды добавляется 2 разряда (или более), которые несут информацию о том, какие операции выполняются в данный момент. Данные операции управляются ГТИ, обеспечивающего формирование соответствующей временной диаграммы.