

7.2 Регистровая алу разрядно-модульного типа
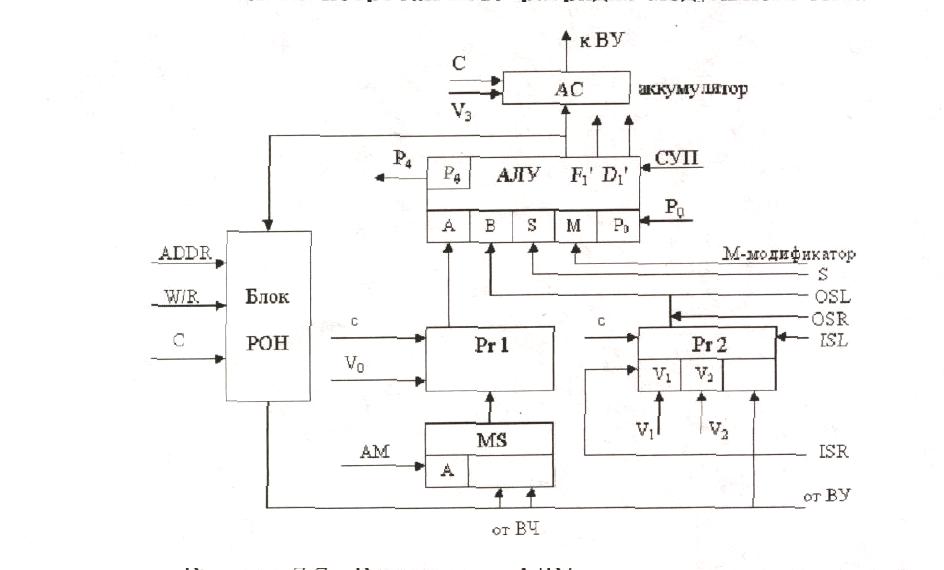
Рисунок 7.7 - Регистровая АЛУ разрядно-модульного типа
1. 4-х разрядное комбинационное АЛУ
2. все RG тоже 4-х разрядные
3. рг2 обеспечивает прием, хранение, сдвиг влево, сдвиг вправо, заем
4. М3 - обеспечивает прием информации в pr1 либо от внутрисистемной шины, либо от внешнего устройства.
В состав данного РАЛУ входят:
- информационные шины:
1. входные: от ВУ, р0, ISL, ISR.
2. выходные: ВУ, р4, F11, D11, OSL, OSR.
- шины управления:
S - управляющее слово,
М - модификатор,
Vo = {O - хранение, 1 - запись информации}
V1,V2 = {00 - хранение, 01-ASL, 10-ASR, 11 – запись}
W/R – {00 - хранение (чтение), 1 - запись}
V3 = {00 - хранение, 1 - запись}
AM = {0 - чтение из внутрисистемной магистрали, 1 - чтение из ВУ}
- цепь синхронизации:
передний фронт - формирование управляющего слова задний фронт -запись в RG
Для использования РАЛУ необходимо решить две задачи:
1. показать как наращиваются разрядности обрабатываемых слов,
2. определить набор операций реализуемых данным РАЛУ.
7.3 Наращивание разрядности обрабатываемых слов
При этом разрядность РОН, Pr1и АС автоматически увеличивается в n раз, где n - число секций. Для того, чтобы увеличить разрядность Рг2 и АЛУ необходимо сформировать цепи по сдвигу и переносу.
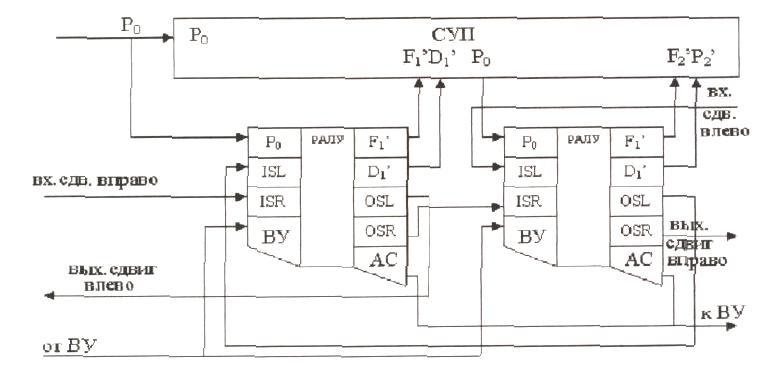
Рисунок 7.8 - Наращивание разрядности
Управляющие сигналы для всех секций РАЛУ наращиваются параллельно, а разрядность обрабатываемых слов последовательно.
7.4 Однокристальные ралу
В данной структуре добавлены цепи по сдвигу и цепи по переносу. Цепи по сдвигу включают в себя: V1, Т2, V4, V3. Когда необходимо осуществить ASL число с удвоенной разрядностью точности, младшую часть числа заносим в Рг2, выбираем V1V2 = {01} (ASL), сигнал L2 выбирается = 0. Через коммутатор V2 выдвинутый старший разряд младшей части числа поступает на вход триггера Т2 и с получением сигнала L3 фиксируется в данном триггере L3 = 1 - тактовой частоты проходят на вход триггера. С триггера Т2 информация поступает на коммутатор V3, который управляется сигналом L4. Если L4 = 1, то информация с триггера Т2 поступает на вход сдвига Рг2. Т.о. получается кольцевой сдвиг. Со сдвигом на один такт.
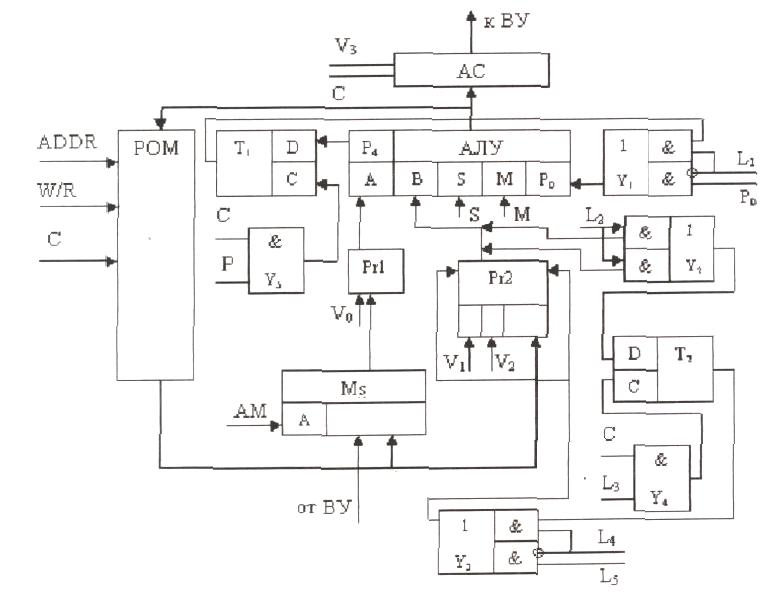
Рисунок 7.13 - Однокристальное РАЛУ
Если L4 = 0, то информация в Рг2 поступает от внешнего источника. В следующем такте в Рг2 заносится старшая часть сдвигаемого числа, происходит сдвиг информации с добавлением к нему информации, хранившейся в триггере Т2.
Цепи связи по переносу в себя включают: V5, Т1, VI.
Для того, чтобы сложить два числа с удвоенным разрядом точности, младшие части данных чисел записываются в Рr1 и Рг2. Данные младшей части поступают на вход АЛУ, в котором происходит их сложение. В результате получается сам результат и разряд переноса. Результат фиксируется в РОНе или в АС, а перенос фиксируется в триггере Т1 (благодаря сигналу р). (если р = 1, то происходит фиксация переноса, если р=0, то в триггере Т1 хранится предыдущее состояние, а значение переноса игнорируется). С триггера Т1 значение переноса поступает на коммутатор V1, который благодаря управляющему сигналу L1 выбирает источник значения переноса (направление), (если L1 = 0, то берется внешний перенос. Если L1 = 1, то берется значение переноса из триггера Т1). В следующем такте в Pr1 и Рг2 заносятся старшие части числа. При их сложении к ним добавится разряд переноса из триггера Т1.