

17.1.2. Пьезоэлектрические преобразователи
Работа этих преобразователей основана на пьезоэлектрическом эффекте. Пьезоэлектрическими называются кристаллы или текстуры, электризующиеся под действием механических напряжений (прямой пьезоэффект) и деформирующиеся в электрическом поле (обратный пьезоэффект).
В зависимости от величины силы сжатия или растяжения меняется количество зарядов на гранях кристалла, перпендикулярных одной из осей симметрии кристаллической решетки (электрической оси). Одновременно меняется и разность потенциалов между этими гранями.
Заряд на гранях
кристалла при деформации не зависит от
геометрии кристалла, но определяется
приложенной силой![]() и
положением граней относительно
электрической оси симметрии кристаллической
решетки:
и
положением граней относительно
электрической оси симметрии кристаллической
решетки:
![]()
где![]() —
пьезоэлектрический модуль материала,
—
пьезоэлектрический модуль материала,![]()
Пьезоэлектрические свойства различных материалов показаны в табл. 2.
Таблица - 2
Кристалл |
Пьезоэлектрический модуль К0, Кл/Н |
Диэлектрическая
проницаемость |
Кварц Сегнетова соль Титанат бария |
0,0021 2.1 0,225 |
4,5 9000 10 000 |

Рисунок 17.10 - Емкостные датчики угловых перемещений с переменной емкостью пластин: 1 — статор; 2 — ротор; 3 — вал
Кварц дешев,
механически прочен, является хорошим
электроизолятором.
Однако его пьезоэлектрический модуль
сравнительно невысок.
Пьезоэлектрический модуль сегнетовой
соли в 1000 раз больше,
однако ее свойства сильно зависят от
температуры и влажности.
Титанат бария имеет большое значение![]() ,
он механически прочен и нечувствителен
к температуре и влажности, однако
стареет: его
,
он механически прочен и нечувствителен
к температуре и влажности, однако
стареет: его![]() падает
примерно на 10 % за год.
падает
примерно на 10 % за год.
Если приложенная сила не меняется, то заряды на гранях кристалла стекают в воздух или через изоляцию и разность потенциалов исчезает. Поэтому пьезоэлементы пригодны только для измерения динамических процессов.
Эти датчики относятся к генераторным и широко применяются в бытовой технике (например, в звукоснимателе проигрывателя).
Пьезоэлектрические датчики нашли широкое применение в машиностроении. Прямой пьезоэффект используется при измерении быстро протекающих процессов, например вибраций, когда быстро меняющееся напряжение на гранях пьезоэлемента усиливается и фиксируется. Обратный пьезоэффект используется для генерации высокочастотных звуковых колебаний, когда высокочастотное переменное электрическое напряжение подается на пьезоэлемент, который сжимается и разжимается с той же частотой, порождая в воздухе акустические волны.
Пьезоэлектрические преобразователи конструктивно просты, малогабаритны, надежны и широко применяются для измерения давления, силы, ускорения. На рис. 3.16, а показано устройство пьезоэлектрического датчика давления с двумя кварцевыми пластинами. Измеряемое давление действует на мембрану 1, являющуюся дном корпуса датчика. Кварцевые пластины 7 зажаты между металлическими прокладками 6. Средняя прокладка соединена с выводом 5, проходящим через экранированную втулку 2 из изоляционного материала. Крышка 5 соединяется с корпусом и через шарик 4 передает давление металлической прокладке и кварцевым пластинам. Использование двух (и более) пластин повышает выходную ЭДС, складывающуюся из ЭДС, возникающих на отдельных пластинах.
На рис. 17.11, б показан пьезоэлектрический датчик ускорения, используемый для измерения вибраций. Пьезоэлемент 5 из тита-ната бария расположен на корпусе прибора 4 между инерционной массой 3 и подпятником 2. Инерционная масса 3 и пьезоэлемент 5 прижаты к подпятнику 2 гайкой 1 через пяту 6 с изоляционной
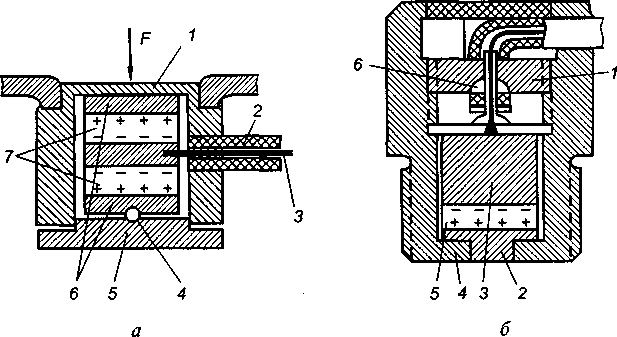
Рисунок 17.11 - Пьезоэлектрические датчики давления (а) и ускорения (б)
прокладкой и контактной пластиной. Датчик позволяет измерять ускорения от 0,2 до 1 g при частоте до 5 Гц.
Выходная мощность пьезоэлектрических преобразователей очень мала, поэтому необходимо использовать усилители с большим коэффициентом усиления и большим входным сопротивлением.