

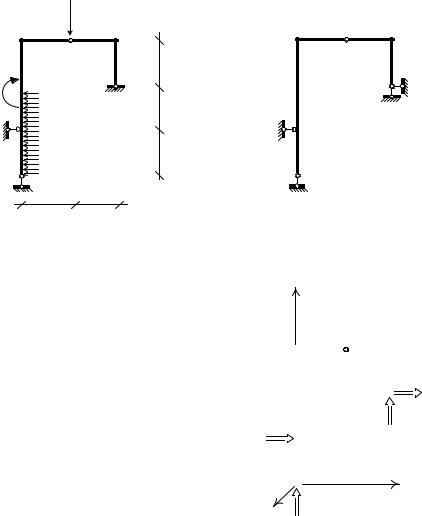
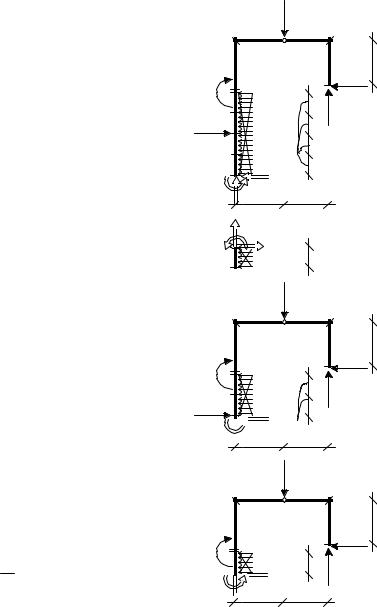
4.3. РАСЧЕТ ТРЕХШАРНИРНОЙ РАМЫ
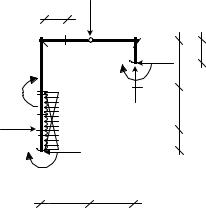
На рис. 4.27 приведена заданная расчетная схема примера, а на рис. 4.28 содержится вариант изображения опорных связей, при котором одной реакции соответствует один опорный стержень (стержневая аналогиея опирания). Это помогает определить количество реакций и
их характер.
qa
|
a |
2qa2 |
|
|
a |
0,5q |
|
|
a |
a |
a |
Ðèñ. 4.27 |
Ðèñ. 4.28 |
Особенностью трехшарнирной рамы (в сравнении с ломаным брусом) является наличие в ее опорных сечениях четырех опорных реак-
ций (в ломаном брусе возникаетреакции)òðè. |
|
|
|
Y |
|||
На рис. 4.29 вводится система |
|
|
|
X,Y,Z - глобальная система |
|||
координат, оси которой определя- |
|
|
|
||||
|
|
|
координат, "привязанная" |
||||
ют правило знаков для реактивных |
|
|
|
к расчетной схеме |
|||
|
|
|
|
|
|
|
|
сил, введенных своими обозначени- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ями. Реакции до их определения |
|
|
|
|
|
С |
XC |
считаются Фоложительно направ- |
|
|
|
|
|
||
ленными (для реакций, как это уже |
|
|
|
|
|
|
YC |
обсуждалось выше, до определения |
XB |
|
|
|
|
||
их значений и истинных направле- |
|
В |
|||||
|
|
|
|||||
ний следует назначать Фоложи- |
|
|
|
|
|
|
|
тельные направления). При этом |
A |
|
|
|
|
X |
|
используется «математическое» |
|
|
|
|
|||
|
|
|
|
|
|||
правило знаков, связанное с гло- |
|
|
|
YA |
|||
бальной системой координат и про- |
Z |
|
|||||
|
|
|
|
|
|||
иллюстрированное на рис. 4.29. |
Ðèñ. 4.29 |
|
103
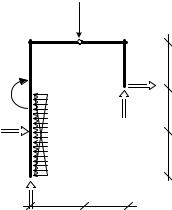
По данным рис. 4.30 назначаются уравнения равновесия (4.9) и варианты их применения для определения реакций опорных связей. Обозначения «СЛЕВА», «СПРАВА» соответствуют вариантам уравнения «дефекта связей» по изгибающему моменту в узле D.
|
qa |
|
|
|
D |
|
a |
|
|
|
|
2qa2 |
|
C XC |
|
XB Ç |
|
YC |
a |
0,5q |
|
|
|
|
|
|
|
|
|
|
a |
A |
|
|
|
YA |
a |
a |
|
|
Ðèñ. 4.30 |
|
|
Y |
|
|
∑ |
mom |
C |
= 0; |
|
|
|
|
A |
|
|
|
|
|
|
(1) |
|||
|
|
∑ |
momслева = |
0; |
|
|||||
XB |
|
|
|
|||||||
|
|
|
|
D |
|
|
|
|||
XC |
∑X = 0; |
|
|
|
|
(2) |
||||
YC |
∑Y = 0. |
|
|
|
|
|
(3) |
|||
èëè |
|
|
|
|
|
|
|
|
(4.9) |
|
Y |
|
|
∑ |
mom |
B |
= 0; |
|
|
|
|
ë |
|
|
|
|
|
|
|
(1) |
||
Xë |
|
∑ |
momсФрава = 0; |
|
||||||
|
|
|
|
|||||||
|
|
|
|
D |
|
|
|
|
||
XB |
∑X = 0; |
|
|
|
|
(2) |
||||
YA |
∑Y = 0. |
|
|
|
|
|
(3) |
|||
Далее решение проводится по последовательности Фервого варианта уравнений (4.9). Для системы (4.9.1) получим:
∑momC = −YA (a + a) |
− |
1 q (a + a) a + XB a |
− 2qa2 |
+ qa a = 0 |
||
−Y |
2a + X a = 2qa2; |
2 |
|
|
|
|
|
|
|
|
|||
A |
B |
1 q (a + a) (a + a) + XB (a + a) − 2qa2 |
|
|||
∑momDлгЦВД = −YA a − |
= 0 |
|||||
|
|
2 |
|
|
|
|
−Y |
a + X 2a = 4qa2. |
|
|
|
|
|
A |
B |
|
|
|
|
|
Решение системы уравнений проводим методом Крамера, для чего преобразовываем ее в матричную форму:
L−2 1ORYA U |
= qa |
2 R2U |
||||
aM |
PS |
V |
|
S |
V |
|
N−1 2QTXB W |
R2U |
T4W |
||||
L−2 1ORx1 U |
|
ãäå |
||||
M |
PS |
V |
= S V , |
|||
N |
−1 2QTx 2 W |
T4W |
|
|
||
L−2 1ORYA / qaU |
||
M |
PS |
V |
N |
−1 2QTXB / qaW |
|
|
RYA U |
Rx1 U |
|
S V = qaS V . |
|
|
TXB W |
Tx 2 W |
R2U
= S V
T4W
Вычисляя вспомогательные определители матрицы коэффициентов при неизвестных и применяя формулы метода Крамера, получаем значения двух из четырех неизвестных реакций:
104
= |
|
−2 1 |
|
= |
|
|
b |
−2 2 |
− |
b |
−1 1 |
|
|
= −3 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
−1 |
2 |
|
|
|
|
|
|
g |
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
= |
|
2 |
1 |
|
|
|
= |
|
|
2 2 − 4 1 |
|
= 0 |
; |
|
|
= |
|
|
−2 2 |
|
= |
|
|
|
|
−2 4 |
|
− |
|
−1 2 |
|
|
|
|
= −6 . |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
1 |
|
|
|
|
4 |
2 |
|
|
|
|
|
b |
|
|
|
|
g |
|
|
|
2 |
|
|
|
−1 4 |
|
−6 |
|
|
|
b |
|
g |
|
b |
|
g |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
x1 = |
|
|
1 |
= |
|
0 |
|
|
= 0 YA = 0; |
x 2 |
= |
|
2 |
= |
|
|
|
|
= 2 XB = 2qa . |
||||||||||||||||||||||||||
|
|
|
|
−3 |
|
|
−3 |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
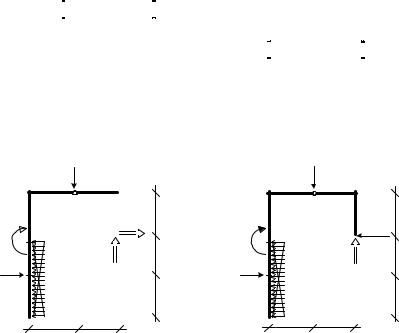
Найденные значения и направления реакций Y A è X B позволяют трансформировать рис. 4.30 в рис. 4.31, à.
qa |
qa |
D
2qa2
B |
0,5q |
2qa |
Aa
à
|
|
XC |
a |
C |
|
|
|
|
YC |
a |
|
|
|||
|
|
||
|
|
|
a |
a
Ðèñ. 4.31
|
|
a |
2qa2 |
qa |
|
2qa |
YC |
a |
|
|
|
0,5q |
|
|
|
|
a |
a |
a |
|
á
Следует обратить внимание на то, что с этого момента обозначе- ния реакций Y A è X B не должно появляться ни в одном из уравнений, формируемых далее.
В соответствии со вторым уравнением последовательности (4.9.1), привлекая данные рис. 4.31, à, записываем:
∑ X = 2qa − 12 q 2a + XC = 0 XC = −qa .
Полученное значение реакции позволяет преобразовать рис. 4.31, à â ðèñ. 4.31, á и использовать последний для формирования третьего уравнения последовательности (4.9.1):
∑Y = −qa +YC = 0 YC = qa.
Таким образом, реакции опорных связей определены. Это позволяет указать на расчетной схеме все нагрузки в явном виде («в
105
|
qa |
|
|
|
E |
|
|
|
|
|
a |
2qa2 |
0,5a |
qa |
|
|
|
|
|
2qa |
|
qa |
a |
|
|
||
0,5q |
|
|
|
|
|
|
a |
a |
a |
|
|
Ðèñ. 4.32 |
|
|
|
значениях»), как это сделано на рис. 4.32. Данные этого рисунка используются для проведения контроля правильности определения реакций опорных связей по уравнению:
∑mom E = −0,5q 2a ba + ag +
+ 2qa ba + ag − 2qa 2 + |
|
|
(4.10) |
||
+ qa 1 a − qa a + qa |
1 a = |
|
|||
|
|
||||
|
2 |
+ qa 2F 4 |
2 |
1I |
|
= qa 2 |
2 + 2 +1 |
+ 1 + |
≡ 0. |
||
b |
g |
G |
2 |
J |
|
|
|
H |
2K |
|
|
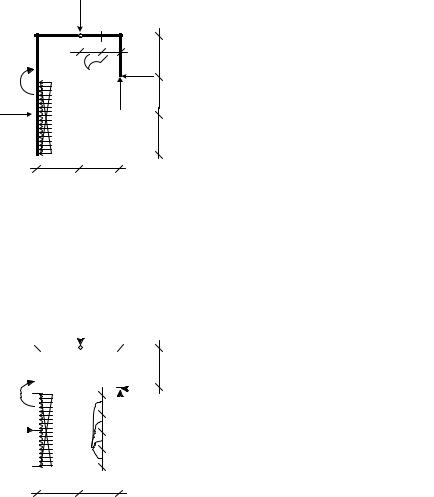
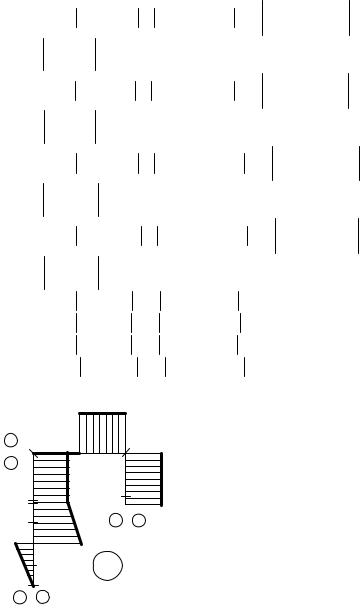
Переходим к назначению контролируемых сечений. С этой целью на рис. 4.33 выделено четыре участка с линейным законом изменения изгибающего момента (6-7, 7-8, 8-9, 9-10) и два участка – с параболи-
ческим законом (1-3, 3-5). |
|
Сечение 3 фиксирует факт транс- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qa |
|
|
|
формации уравнения параболы учас- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тка 1-3 в уравнение участка 3-5. При- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
9 |
|
чиной этого изменения является попе- |
||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
речная сила 2qa в сечении 3. |
|
|
|
|
|
|
|
|
|
8 |
|
|
a |
|||
|
|
|
|
|
|
|
|
|
|
|
Сечения 2 и 4 позволяют пост- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2qa2 |
6 |
|
|
|
|
|
10 |
|
|
qa |
роить соответственно на участках |
|||
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
5 |
|
|
|
|
|
|
|
|
qa |
1-3 и 3-5 параболу изменения изги- |
|||
|
|
|
|
|
|
|
|
||||||||
|
2qa |
4 |
|
|
|
|
0,5q |
|
|
|
бающего момента. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Сечения 5 и 6 выделяют внешний |
||
|
|
3 |
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
|
|
|
|
0,5a |
|
|
|
сосредоточенный момент, присутствие |
||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
которого на эпюре моментов отмеча- |
|||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
a |
|
a |
|
|
|
ется разрывом функции изменения зна- |
|
|
|
|
|
|
|
|
|
|
|
|
|
чений ординат. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сечения 7 и 9 позволяют учесть |
|
|
|
|
|
|
Ðèñ. 4.33 |
|
|
|
|
переход продольных сил в поперечные |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(и наоборот) в этих узлах. |
В соответствии с правилом, согласно которому эпюра изгибающего момента строится на растянутых волокнах (РВ), далее при вычислении значений внутреннего момента в контролируемых сечениях будем использовать те же обозначения местоположения растянутых волокон, что и при расчете ломаного бруса.
106
Исходные данные для определения значений изгибающего момента приведены на рис. 4.34.
∑mom1
M1−2
∑mom 2
M2−1
M2−3
∑mom 3
M3−2
M3−4
∑mom 4
M4−3
M4−5
=M1−2 + 12 q 2a a −
−2qa a − 2qa 2 − qa a +
+qa 2a + qa 2a = 0
=0.
= −0,5q 0,5a F 1 |
0,5aI |
+ |
|||
|
|
|
G |
J |
|
|
|
|
H 2 |
K |
|
+ M2−1 = 0 |
|
|
|||
= |
1 |
qa 2 |
(ÐÂ / Ï); |
|
|
|
|
||||
16 |
|
|
|
|
|
= M2−1 . |
|
|
|
||
= M3−2 + 0,5q a 12 a −
− 2qa 2 − qa a + qa a + + qa 2a = 0
= − 14 qa 2 (ÐÂ / Ï);
= M3−2 .
= M4−3 + 0,5q 0,5a × |
|||
× |
F 1 |
0,5aI |
− 2qa 2 − qa a + |
|
G |
J |
|
|
H 2 |
K |
|
+qa 0,5a + qa 2a = 0
=167 qa 2 (ÐÂ / Ë) ;
=M4−3 .
7
2qa2 6
5
2qa 4
3
2
M1-2 1
N1-2
N2-1
M2-1 2
1
7
|
qa |
|
|
|
|
9 |
|
|
8 |
a |
|
|
|
||
|
10 |
qa |
|
0,5q |
|
qa |
|
|
|
||
Q1-2 |
0,5a |
à |
|
a |
a |
|
|
Q2-1 |
0,5a |
|
|
0,5q |
á |
||
|
|||
|
qa |
|
|
|
|
9 |
|
|
8 |
a |
|
|
|
2qa2 6
5
2qa 4
M3-2 3
 N3-2
N3-2 
7
2qa2 6
5
4 

M4-3
N4-3 
10
0,5q |
0,5a |
Q3-2 |
a a qa
8
10
0,5q |
0,5a |
||
Q |
|
||
4-3 |
a |
||
a |
|||
qa
qa
â
9
a
qa
qa ã
Рис. 4.34 (начало)
107
|
|
|
|
|
|
qa |
|
|
|
|
|
7 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
8 |
|
a |
|
|
|
|
|
|
|
|
|
|
|
2qa |
2 |
|
|
|
|
|
10 |
qa |
|
|
|
|
|
|
|
|
|||
|
5 |
6 |
|
|
|
|
|
||
M5-4 |
|
Q |
5-4 |
|
|
qa |
ã |
||
N5-4 |
|
a |
a |
|
|||||
|
|
|
|||||||
|
|
|
|
||||||
∑mom 5 = M5−4 − 2qa2 − qa a +
+qa 2a = 0
M5−4 = qa 2 (ÐÂ / Ë) .
|
|
|
qa |
|
7 |
|
|
|
9 |
|
|
|
8 |
a |
|
|
|
|
|
6 |
Q6-7 |
10 |
qa |
|
|
|
|
|
|
N6-7 |
M |
6-7 |
a |
|
a |
qa |
|||
|
|
|
qa |
|
Q7-6 |
7 |
|
|
9 |
|
|
|
||
|
|
8 |
|
|
|
|
|
a |
|
N7-6 |
M7-6 |
|
||
|
qa |
|||
|
|
|
10 |
|
|
a |
|
a |
qa |
|
|
|
M9-8 |
9 |
|
|
N9-8 |
|
|
|
|
|
Q9-8 |
a |
|
|
|
|
|
|
|
|
10 |
qa |
qa
Рис. 4.34 (окончание)
∑mom 6
M6−7
ä
∑mom 7
M7−6
M7−8
åM8−7
∑mom 9
M9−8
M9−10
M10−9
æ
=M6−7 − qa a +
+qa 2a = 0
=−qa 2 (ÐÂ / Ï) .
=M7−6 − qa a − qa a +
+qa 2a = 0
=0;
=M7−6 ;
=M8−9 = 0.
=M9−8 − qa a = 0
=qa 2 ;
=M9−8 ;
=0.
à
108
Обратите внимание, что значения некоторых моментов приведены без вычислений (например, М 2-3, Ì 3-4, Ì 8-7, Ì 10-9 ). Объяснение этому заключается в особенностях объединения сечений в точке, которые нужно «проявить», чтобы вычислить соответствующие значения:
•сечения 2, 3, 4, 7 и 9 являются сечениями «без дефектов», т.е. в этих сечениях могут возникать все виды усилий;
•сечения 8 и 10 являются безмоментными шарнирами, поэтому значения моментов в них равны нулю.
Для получения большей уверенности в правильности своих выкладок можно проверить соответствующие значения и прямыми вычислениями на основе метода сечений.
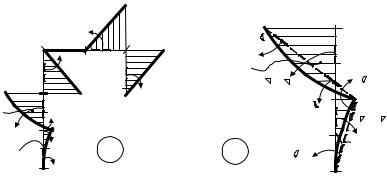
Найденные ординаты изгибающего момента используются для построения эпюры изгибающего момента на растянутых волокнах (рис. 4.35, à), а также определения «инженерных» знаков ординат эпюры поперечного усилия (рис. 4.35).
|
|
|
|
|
|
|
|
< |
0 |
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9= |
Q |
9 |
|
|
|
|
|
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
||
|
|
|
Q |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
0,0 |
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,0 |
|
> |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||
|
|
Q |
|
8 |
|
|
|
|
|
|
|
|
|
|
0 |
7/16 |
|
|
|
|
|
|
|
|
4 |
||
|
|
7 |
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
||||||
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
- |
|
|
|
|
|
|
|
Q |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
7 |
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q3-1>0 |
||
7/16 1,0 |
|
|
|
< |
|
|
10 |
|
|
|
|
|
|
|
Q |
|
=Q |
|
<0 |
|
|
|
|||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
3-5 |
|
|
|
||||||||
6 |
|
|
|
|
|
|
|
|
|
-9 |
|
|
|
|
|
|
|
5-3 |
|
|
|
|
|
0,25 |
|||
|
|
1,0 |
|
|
|
Q 1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
3 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
||||||
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
< |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
||||||
|
0,25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Q5-3<0 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q3-1=Q1-3>0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
Q3-5<0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/16 |
|||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1/16 |
2 |
Q3-1>0 |
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
, qa |
|
|
|
|
|
|
M1-5 |
, qa |
|
|
Q1-3<0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Q1-3>0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
à |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
á |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðèñ. 4.35 |
|
|
|
|
|
|
|
|
|
|
Вычисление ординат Q i-j эпюры поперечного усилия включает следующие операции:
• разложение криволинейной эпюры изгибающих моментов на уча- стке на линейную часть и параболическую (Q 5-3 , Q 3-5 , Q 3-1 , Q 1-3 );
• вычисление модулей тангенсов соответствующих углов по формулам, которые являются интерпретацией зависимости tgα(M) =
= dM/dx = Q;
• присвоение «инженерного» знака этим значениям (см. рис. 4.35, á). Для всех участков эпюры изгибающего момента рассматриваемого примера (см. рис. 4.35) соответствующие действия представлены
формулами:
109
|
Q |
|
|
= ± tgM (l |
|
|
|
) |
± tgM (l |
|
|
|
|
,ò.1) |
= + |
1 − 0 |
qa2 / a − |
||||||||||||||||||||
|
1 −3 |
|
|
|
|
|
1−3 |
|
|
|
|
|
|
|
1−3 |
|
|
|
|
|
4 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
− |
1 q l |
= + |
1 qa − |
1 |
1 q a = 0; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
2 |
1−3 1−3 |
|
|
|
|
|
4 |
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
3 |
−1 |
= ± tgM (l |
|
|
|
) |
± tgM (l |
3−1 |
,ò.3) |
= + |
1 − 0 |
qa2 / a + |
|||||||||||||||||||||||
|
|
|
|
|
|
3−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
+ |
1 q l |
= + |
1 qa + |
1 q |
1 a |
|
= + |
1 qa; |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
2 1−3 1−3 |
|
|
|
|
|
4 |
|
|
|
2 |
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
Q |
3 |
−5 |
= ± tgM (l |
3 |
−5 |
) ± tgM (l |
3 |
−5 |
,ò. 3) = − |
1 |
+ |
|
1 qa2 |
/ a − |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
− |
1 q3−5l3−5 |
= − |
|
5 qa − |
1 q |
|
1 a |
|
= − |
3 qa; |
|
|
|
|
|
|
|
|
(4.11) |
|||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
4 |
|
|
2 |
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
Q |
5 |
−3 |
= ± tgM (l |
5−3 |
) ± tgM (l |
5−3 |
,ò. 5) = − 1 |
+ |
1 qa2 |
/ a + |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
+ |
1 q3−5 l3−5 = − |
5 qa + |
1 q |
|
1 a = −qa; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
4 |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Q |
6 |
−7 |
= ± tgM(l |
6 |
−7 |
) |
|
|
= − |
1 |
− 0 |
) |
qa2 / a = −qa = Q |
7−6 |
; |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Q7−8 |
= ± tgM(l7−8) |
|
|
= ± (0 − 0)qa2 / a = 0 = Q8−7; |
|
|
|
|
||||||||||||||||||||||||||||
|
Q |
8 |
−9 |
= ± tgM(l |
8−9 |
) |
|
|
= − 1 − 0 |
) |
qa2 / a = −qa = Q |
9−8 |
; |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
( |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Q |
9 |
−10 |
= ± tgM(l |
9 |
−10 |
) |
= + |
1 − 0 |
qa2 / a = +qa = Q |
−9 |
. |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|||||||||||
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По результатам вычислений |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.11) построена эпюра поперечного |
|||||||||||
- |
7 |
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
усилия, изображенная на рис. 4.36. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычисление ординат N i-j ýïþ- |
||||||||||||||
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
8 |
|
|
|
|
|
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
ры продольного усилия на основе |
||||||||||||||
|
|
|
|
1,0 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эпюры Q и заданной узловой на- |
|||||||||||||||
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
грузки из сосредоточенных сил |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
5 |
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
включает: |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
выявление иерархической |
||||||||||||||
0,5 |
3 |
|
|
1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
последовательности узлов, содер- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
жащих не более двух продольных |
|||||||||||||
|
|
2 |
|
|
|
|
|
|
, |
|
qa |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
усилий (первичная последователь- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ность включает узлы 1, 7, 9, 10; вто- |
||||||||||||
|
+ |
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ричная и последующие последова- |
|||||||||||||
|
|
|
|
Ðèñ. 4.36 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тельности отсутствуют); |
|||||||||||||
110 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
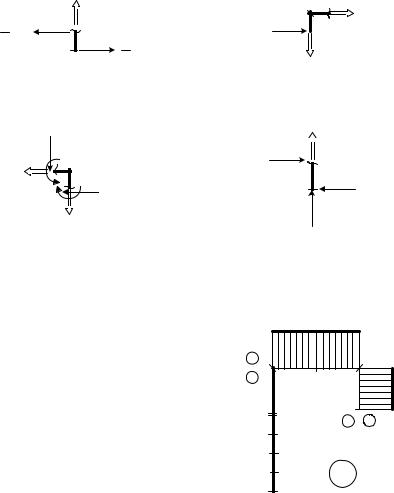
•формирование уравнений равновесия в проекциях на оси глобальной системы координат для каждого из узлов последовательности;
•вычисление ординат продольных усилий в узле и присвоение им «инженерного» знака.
Результат выполнения указанных выше операций представлен на рис. 4.37 в виде воследовательности узлов расчетной схемы, нагруженных внутренними и внешними силами.
|
N1-7 |
|
|
|
N7-9 |
|
||
1 qa |
|
|
qa |
7 |
|
|||
|
|
1 |
|
|
|
|||
2 |
|
|
|
|
|
|
||
1 |
|
2 qa |
|
|
N7-1 |
|
||
|
|
|
|
|
||||
∑Y = −N1−7 = 0 |
|
∑X = N7−9 + qa = 0 N7−9 = −qa; |
||||||
|
N1−7 = 0. |
|
∑Y = −N7−1 = 0 N7−1 = 0. |
|||||
|
|
à |
|
|
|
á |
|
|
|
qa qa2 |
|
|
qa |
N10-9 |
|
||
|
|
9 |
|
|
|
qa |
|
|
N9-7 |
qa |
|
|
|
|
|||
|
|
|
10 |
|
||||
|
qa2 |
N9-10 |
|
|
qa |
|
||
|
|
|
|
|
||||
∑ X = −N9−7 − qa = 0 N9−7 = −qa; |
∑X = −qa + qa ≡ 0; |
|
||||||
∑Y = −qa − N 9−10 = 0 N9−10 = −qa. |
∑Y = N10−9 + qa = 0 |
|||||||
|
|
â |
|
|
|
N10−9 = −qa. |
||
|
|
|
|
|
ã |
|
||
|
|
|
|
Ðèñ. 4.37 |
|
|
||
|
|
|
|
|
|
1,0 |
|
|
Ïî |
данным вычислений на |
|
|
|
||||
рис. 4.37 строится эпюра продоль- |
– 7 |
|
9 |
|||||
ных усилий (рис. 4.38). |
|
+ |
8 |
1,0 |
||||
Контроль правильности опре- |
|
10 |
||||||
деления |
ординат |
ýïþð |
усилий |
6 |
|
|||
+ |
– |
|||||||
для заданной расчетной схемы про- |
5 |
|||||||
водится по уравнениям равновесия |
4 |
|
|
|||||
|
|
|
||||||
для произвольной части расчетной |
3 |
|
|
|||||
схемы (рис. 4.39). |
|
|
2 |
N |
, qa |
|||
Соответствующие уравнения |
1 |
|
|
|||||
равновесия и вычисления по ним |
|
|
|
|||||
представлены |
формулами |
(4.12). |
|
Ðèñ. 4.38 |
|
|||
|
|
|
|
|
|
|
111 |
|
|
|
|
0,5a |
qa |
|
|
|
|
|
|
|
7 |
F |
|
|
|
|
|
|
|
|
|
|
8 |
2qa |
2 |
6 |
|
0,5qa 2 |
|
|
10 |
||
|
|
|
|
|
|
|
5 |
0,5q |
|
2qa |
|
4 |
||
|
|
3 |
0,25qa |
|
|
|
2 |
||
|
|
|
|
|
(1/16)qa 2
a a
Ðèñ. 4.39
9
qa a
qa a
0,5a
0,5a
∑ |
X = − 1 qa + 2qa − |
1 q Fa + |
1 aI |
− qa ≡ 0; |
4 |
G |
J |
|
|
|
2 H |
2 K |
|
∑Y = −qa + qa ≡ 0; |
|
F |
|
|
|
|
|
I |
|
|
|
F |
|
|
|
I |
|
|
|
|
|||||||||||||||
|
|
1 |
|
|
|
|
2 |
|
|
|
1 |
|
|
1 |
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
||||||||
∑mom F |
= − |
|
|
|
|
qa |
|
|
− |
|
|
qa G |
|
|
a + a + aJ − |
|
q |
Ga + |
|
aJ × |
|
|
|||||||||||||
16 |
|
|
|
4 |
2 |
2 |
2 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
I |
H |
|
|
|
K |
|
|
H |
|
|
K |
|
|
|
|
||||||||||
|
|
|
L |
1 F |
|
|
|
|
1 |
|
|
O |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
||||||||
|
|
|
N |
2 H |
|
|
|
|
2 |
|
K |
|
Q |
|
|
|
|
|
|
|
|
|
|
|
− qa |
2 |
a − (4.12) |
||||||||
|
× M |
|
|
Ga + |
|
|
aJ + aP + 2qa ba + ag − 2qa |
|
|
|
|
||||||||||||||||||||||||
|
− qa 1 a − 1 qa 2 + qa Fa + 1 aI |
= |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
G |
|
2 |
|
J |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
K |
|
|
|
2F |
|
3I |
|
|||||||||
|
|
|
|
|
|
2F |
1 |
|
|
|
|
5 |
|
21 |
|
|
1 |
|
1 |
|
1I |
|
|
|
|
||||||||||
|
= −qa |
|
G |
|
|
|
|
+ |
8 |
+ |
16 |
+ 2 + |
2 |
+ |
2 |
+ |
|
J |
+ qa |
|
G 4 + |
|
|
J = |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
H16 |
|
|
|
|
|
|
|
2K |
|
|
|
H |
|
2K |
|
|||||||||||||
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|||
|
= −qa |
|
|
b |
+10 + 21 + 32 + |
|
g |
+ qa |
2 b |
+ 3 |
g |
≡ 0 . |
|||||||||||||||||||||||
|
16 |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
24 |
|
|
8 |
|
||||||||||||||||||||||||
Уравнения равновесия отрезанной части заданной расчетной схемы удовлетворяются тождественно, что свидетельствует о значительной достоверности проведенных построений.
Решение задачи о построении эпюр усилий в трехшарнирной раме представлено рис. 4.27, рис. 4.35, à, рис. 4.36 и рис. 4.38. Будучи собраны вместе (рис. 4.40), эти рисунки представляют собой собственно ре- ¯ение задачи, поскольку, в конечном итоге, путь получения необходимых данных (ординат M, Q è N) может быть и иным.
112

|
|
|
qa |
|
|
|
|
|
|
|
a |
2qa2 |
|
|
|
|
|
|
|
|
|
|
a |
|
|
0,5q |
|
|
|
|
|
|
|
|
a |
|
|
a |
a |
|
|
|
|
|
à |
|
|
|
|
|
1,0 |
|
|
- |
7 |
|
|
9 |
|
+ |
|
8 |
|
|
1,0 |
|
|
1,0 |
10 |
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
- |
|
|
|
4 |
|
|
+ |
|
0,5 |
3 |
|
1,5 |
|
|
|
|
|
|
||
|
|
2 |
Q |
, |
qa |
|
1 |
|
|
|
|
+ |
- |
|
|
|
|
|
|
|
â |
|
|
1,0
|
|
|
7 |
|
|
0,0 |
|
9 |
|
|
|
|
|
|
1,0 |
||
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
1,0 |
|
|
6 |
5 |
|
|
1,0 |
10 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
7/16 |
|
|
|
4 |
0,25 |
|
|
|
|
3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
1/16 |
2 |
|
|
|
|
M , qa2 |
|
|
|
1 |
|
|
|
|
|
|
|
á |
|
|
|
1,0 |
|
– |
7 |
|
9 |
+ |
|
8 |
1,0 |
|
|
10 |
|
|
6 |
|
|
|
+ |
– |
|
|
5 |
||
|
4 |
|
|
|
3 |
|
|
|
2 |
N |
, qa |
|
1 |
|
|
|
|
ã |
|
Ðèñ. 4.40
Операционный алгоритм решения поставленной задачи, реализованный в данном примере, не отличается от операционного алгоритма для ломаного бруса (см п. 4.2, рис. 4.26). Этот факт нетрудно объяснить, если учесть, что вся разница между реализованными алгоритмами состоит в операциях по определению реакций опорных связей. А этот уровень детализации операций алгоритмы не содержат (как для балки, так и для ломаного бруса). Еще одной особенностью операционного алгоритма для трехшарнирной рамы является то, что он включа- ет в себя алгоритм для однопролетной балки.
113