

Здесь nN – число стержней, в которых необходимо учесть де- формации растяжения–сжатия; Li – матрица внутренних уси- лий (изгибающих моментов и продольных сил) от единичных факторов, приложенных в направлении определяемых пере- мещений; LF – матрица внутренних усилий от внешних сило- вых воздействий; В – матрица упругой внутренней податли- вости комбинированной системы, учитывающей как дефор- мации изгиба, так и деформации растяжения–сжатия. Упомя- нутые матрицы имеют блочную структуру:
L |
|
éM |
ù |
|
éM |
|
ù |
éB |
|
0 ù |
(1 .17) |
|
i |
= ê i |
ú; L |
F |
= ê |
F |
ú; |
B = ê |
|
M |
ú . |
||
|
ë Ni û |
ë NF û |
ë |
0 BN û |
|
|||||||
Формирование блоков матриц (1 .17) производится: Mi, MF, BM – по правилам, изложенным выше для рам и балок; Ni, NF, BN – по соответствующим правилам для ферм.
18.5. Определение перемещений от температурных воздействий
Формула для определения перемещений от изменения температуры в статически определимых плоских стержне-
вых системах
nMlk |
|
a |
kt |
Dto |
nN lk |
|
D jt = å ò |
Mik (s) |
|
nr,k |
ds + å ò |
Nik (s)ak Dt0,ko ds . (1 .19) |
|
|
|
hk |
||||
k=1 0 |
|
|
|
k=1 0 |
|
По-прежнему будем считать постоянными на любом участке сооружения величины коэффициента линейного тем- пературного расширения материала ak, высоты поперечного
сечения hk и приращения температуры Dtok . Эпюры внутрен-
них усилий Mik(s) и Nik(s) на участках, где происходит изме- нение температуры, при определении линейных и угловых перемещений сечений и узлов стержневой системы от еди-
ничных сосредоточенных сил и сосредоточенных моментов линейны.
Определённые интегралы соотношения (1 .19) имеют одинаковую структуру и для k-го участка могут быть записа- ны в обобщённой форме:
lk |
Ltk (s)Btk Tkds . |
(1 .20) |
ò |
||
0 |
|
|
Здесь Ltk(s) – представление линейных функций изгибающих моментов Mik(s) и продольных сил Nik(s); Btk – представле-
ние постоянных физических и геометрических характеристик
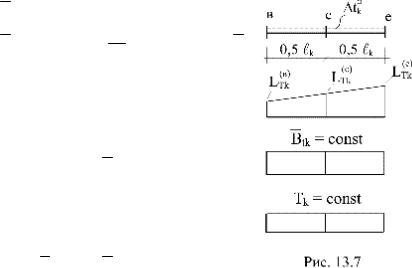
участка αk |
и hk, Tk |
– постоянных неравномерных to |
и |
|
|
nr,k |
|
равномерных to0,k приращений температуры (рис. 1 .7).
Определённый интеграл (1 .20) вычислим по формуле Симпсона, принимая во внимание, что
Btk = const, Tk = const,
BtkTk lòkLtk (s)ds = l6k (L(tkв) + 4L(tkc) + L(tke) )BtkTk 0
.(1 .21)
Учитывая |
линейность |
функции |
||
Ltk(s), получим: |
|
|
||
L(c) = |
1 |
(L(в) + L(e) ). |
(1 .22) |
|
tk |
2 |
tk |
tk |
|
Обозначим Btk ℓk = Btk и подставим
зависимость (1 .22) в соотношение (1 .21). После несложных преобразова-
ний получим точное численное значе- ние определённого интеграла (1 .20).
lòk Ltk (s)Btk Tk ds = Btk Tk lòkLtk (s)ds = |
(1 .23) |
|
0 |
0 |
|
= L(tkc) Btk Tk .
Формула (1 .23) по существу есть представление чис- ленного значения определённого интеграла (1 .20) в виде произведения трёх матриц первого порядка, т.е. в матричной форме. С учётом всех участков, где происходит изменение температуры, формула (1 .19) для определения перемещений в матричной форме запишется:
t = LTt Bt T . |
(1 .24) |
В матричном соотношении (1 .24) |
t – матрица переме- |
щений от температурных воздействий. |
Количество её строк |
равно количеству определяемых перемещений n, а столбцов
– числу вариантов температурных воздействий f.

Матрица Lt – это матрица внутренних усилий (изгибаю- щих моментов и продольных сил) от единичных факторов, приложенных в направлении определяемых перемещений.
L |
|
= [L |
|
L |
|
K L |
|
K L |
|
] , |
éM |
tj |
ù |
|
|
|
|
|
где Ltj = ê |
ú . |
|||||||
|
t |
|
t1 |
|
t2 |
|
tj |
|
tn |
|
ê Ntj |
ú |
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
û |
Для k-ых участков, где задано изменение температуры Dtok = const, элементы блоков Mtj и Ntj фиксируются в сре-
динных сечениях этих участков.
Матрица Bt называется матрицей температурной подат- ливости сооружения и состоит из двух блоков: Btn,r – подат- ливости, определяемой неравномерным приращением темпе- ратуры, и Bt,0 – равномерным приращением температуры.
B |
|
éB |
t,nr |
0 |
ù |
t |
= ê |
Bt,0 |
ú . |
||
|
ê |
0 |
ú |
||
|
|
ë |
|
|
û |
В случае, когда для k-го участка изменения температуры ak = const, hk = const, имеем:
B(t,knr) = ahk lk , B(t,k0) = ak lk . k
Наконец, Т – это матрица приращений температуры по вариантам воздействий.
T = [T1 T1 |
… Tj |
… Tf], где T |
|
éT |
ù |
|
= ê nr,j |
ú . |
|||
|
|
|
j |
ê T0,j |
ú |
|
|
|
|
ë |
û |
Tnr,j и T0,j, соответственно, – подматрицы неравномерных и равномерных приращений температур j-го варианта темпе- ратурного воздействия. Элементами этих матриц на k-ом участке изменения температуры являются перепады прира-
щений температур по высоте поперечного сечения Dtonr,k и приращения температуры в центре тяжести поперечного се- чения Dto0,k .
18.6. Определение перемещений от кинематических воздействий
Для определения перемещений в статически определи- мых системах от кинематических воздействий, в частности, от смещения опорных связей, используется формула:
n
D jc = - åR(k)D(k) , (18.25)
k=1
где n – число смещаемых связей.
Соотношение (18.25) представим в матричной форме,
удобной для вычисления группы перемещений от различных вариантов кинематических воздействий:
Dc = RTc ED(c) . |
(18.26) |
В матричной зависимости (1 .26) Dс – это матрица пере- мещений в заданном сооружении, вызванных заданными смещениями связей. Число её строк равно количеству опре- деляемых перемещений, а столбцов – числу вариантов кине- матических воздействий. Каждый вариант такого воздейст- вия может включать в себя смещение одной или группы свя- зей.
Элементы матрицы Rc представляют собой реакции в смещаемых связях от единичных факторов, приложенных в направлении определяемых перемещений.
|
|
|
|
|
|
|
|
|
|
|
|
|
éRc,1j |
ù |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
ú |
|
|
= [R |
|
|
|
|
|
|
|
], где |
|
|
êRc,2 j ú |
||
R |
|
|
R |
|
K R |
|
K R |
|
R |
|
ê |
M |
ú |
||
|
|
|
|
|
|
= ê |
ú . |
||||||||
|
c |
|
c1 |
|
c2 |
|
cj |
|
cβ |
|
|
cj |
êRc,kj ú |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
ê |
M |
ú |
|
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
ú |
|
|
|
|
|
|
|
|
|
|
|
|
|
êR |
c,nj |
ú |
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
û |
|
Реакции в k-ой смещаемой связи от единичных воздей- ствий, приложенных в направлении искомых перемещений, в матрицу Rc вносятся со знаком "плюс", если их направление совпадает с направлением смещения этой связи, и со знаком "минус", – если не совпадает.
D(с) – матрица заданных смещений связей по вариантам воздействий.