

- •Предисловие
- •5. Работа внутренних сил плоской стержневой системы
- •6. Принцип возможных перемещений и упругие системы
- •9. Теорема о взаимности перемещений
- •10. Теорема о взаимности реакций
- •11. Теорема о взаимности реакций и перемещений
- •14. Теорема Лагранжа
- •18.1. Понятие о матрице перемещений
- •18.2. Вычисление интегралов формулы Мора в матричной форме в случае произвольных подынтегральных функций
- •18.4. Определение перемещений от силового воздействия
- •18.5. Определение перемещений от температурных воздействий
- •18.6. Определение перемещений от кинематических воздействий
- •1.7. Определение перемещений от совместных воздействий различного характера
- •5.1. РАСЧЕТ ОДНОПРОЛЕТНОЙ БАЛКИ
- •5.2. РАСЧЕТ ЛОМАНОГО БРУСА
- •5.3. РАСЧЕТ ТРЕХШАРНИРНОЙ РАМЫ
- •5.4. РАСЧЕТ ФЕРМЫ С ТРЕУГОЛЬНОЙ РЕШЕТКОЙ (АНАЛИТИЧЕСКИЙ СПОСОБ)
- •5.5. РАСЧЕТ ФЕРМЫ С ТРЕУГОЛЬНОЙ РЕШЕТКОЙ (ГРАФИЧЕСКИЙ СПОСОБ)
- •6.1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗАДАННОЙ РАСЧЕТНОЙ СХЕМЫ
- •6.2. ЗАМЕНЯЮЩАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ЭЛЕМЕНТАРНЫХ РАСЧЕТНЫХ СХЕМ
- •6.3. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ
- •6.7. ПРОВЕРКА ПОЛУЧЕННОГО РЕШЕНИЯ ЗАДАЧИ
- •7.2. ПОСТРОЕНИЕ НАПРАВЛЯЮЩИХ ЭПЮР
- •7.3. РЕАЛИЗАЦИЯ МАТРИЧНОЙ ФОРМЫ ВЫЧИСЛЕНИЯ ПЕРЕМЕЩЕНИЙ
- •7.3.1. РАЗРАБОТКА СХЕМЫ ДИСКРЕТИЗАЦИИ
- •7.3.2. МАТРИЧНАЯ ФОРМА ПРЕДСТАВЛЕНИЯ ГРУЗОВОЙ И НАПРАВЛЯЮЩЕЙ ЭПЮР
- •7.3.3. ПОСТРОЕНИЕ МАТРИЦЫ ПОДАТЛИВОСТИ
- •7.3.4. ПРИЕМЫ МИНИМИЗАЦИИ РАЗМЕРОВ МАТРИЦЫ ПОДАТЛИВОСТИ
- •7.4. ПРОВЕРКА ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
- •8.1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗАДАННОЙ РАСЧЕТНОЙ СХЕМЫ
- •8.2. КЛАССИФИКАЦИЯ СТЕРЖНЕЙ РЕШЕТКИ ФЕРМЫ
- •8.3. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ГРАФИЧЕСКИМ СПОСОБОМ
- •8.5. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ НА ОСНОВЕ ЛИНИЙ ВЛИЯНИЯ
- •9.1. ПОСТАНОВКА ЗАДАЧИ РАСЧЕТА
- •9.3. ВЫБОР ОСНОВНОЙ СИСТЕМЫ МЕТОДА СИЛ
- •9.4. КАНОНИЧЕСКАЯ СИСТЕМА УРАВНЕНИЙ МЕТОДА СИЛ
- •9.5. МАТРИЧНАЯ ФОРМА МЕТОДА СИЛ
- •9.5.1. РАЗРАБОТКА СХЕМЫ ДИСКРЕТИЗАЦИИ
- •9.5.4. ФОРМИРОВАНИЕ КАНОНИЧЕСКОЙ СИСТЕМЫ УРАВНЕНИЙ
- •9.5.5. РЕШЕНИЕ КАНОНИЧЕСКОЙ СИСТЕМЫ УРАВНЕНИЙ
- •9.7. КОНТРОЛЬ ПРАВИЛЬНОСТИ РЕШЕНИЯ ЗАДАЧИ
- •10.1. ПОСТАНОВКА ЗАДАЧИ РАСЧЕТА
- •10.2. НАЗНАЧЕНИЕ СИСТЕМЫ ДОПОЛНИТЕЛЬНЫХ СВЯЗЕЙ ДЛЯ СОЗДАНИЯ ЗАМЕНЯЮЩЕЙ СИСТЕМЫ ОДНОПРОЛЕТНЫХ БАЛОК
- •10.3. ОСНОВНАЯ СИСТЕМА МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.4. КАНОНИЧЕСКАЯ СИСТЕМА УРАВНЕНИЙ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.5 СТАНДАРТНЫЕ ЭПЮРЫ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.6. ГРУЗОВАЯ И ЕДИНИЧНЫЕ ЭПЮРЫ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.7. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ КАНОНИЧЕСКОЙ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.9. ОПРЕДЕЛЕНИЕ ОРДИНАТ ЭПЮРЫ ИЗГИБАЮЩЕГО МОМЕНТА В ЗАДАННОЙ РАСЧЕТНОЙ СХЕМЕ
9.2. НАЗНАЧЕНИЕ СИСТЕМЫ ДОПОЛНИТЕЛЬНЫХ СВЯЗЕЙ ДЛЯ СОЗДАНИЯ ЗАМЕНЯЮЩЕЙ СИСТЕМЫ ОДНОПРОЛЕТНЫХ БАЛОК
Каноническая система уравнений метода перемещений определяется количеством дополнительных угловых и линейных связей, которые нужно ввести в ЗРС для того, чтобы обеспечить независимую работу однопролетных балок по изгибающему моменту и поперечным усилиям.
Назначение связей проводится в два этапа:
• на первом этапе (ðèñ. 9.3, à) во все жесткие узлы ЗРС, кроме опорных, вводятся связи, запрещающие передачу через эти узлы изгибающего момента (так называемые «плавающие» заделки — их особенностью является возможность линейного перемещения этой связи по плоскости); поскольку введение связей запрещает повороты соответствующих узлов, на рис. 9.3, à введены обозначения запрещенных угловых перемещений Z k;
3 |
4 |
3 |
|
4 |
3 |
|
4 |
3 |
4 |
Z2 |
|
Z3 |
|
|
|
|
|
|
|
2 |
5 |
|
2 |
5 |
2 |
5 |
|
2 |
5 |
Z1 |
|
|
|
|
|
|
|
|
|
1 |
à |
|
6 |
1 |
á |
6 |
1 |
â |
6 |
|
|
1 |
ã |
6 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
3 |
4 |
W1 |
3 |
4 |
Z4 |
3 |
|
4 |
|
Z4 |
3 |
4 |
Z4 |
|
2 |
5 |
|
2 |
5 |
|
2 |
|
5 |
W2 |
|
2 |
5 |
Z5 |
1 |
ä |
|
6 |
1 |
å |
6 |
1 |
æ 6 |
|
|
1 |
ç |
6 |
|
Ðèñ. 9.3
• на втором этапе (ðèñ. 9.3, á-ç) проводится анализ, в ходе которого выявляются линейные степени свободы, которые обеспечивают совместную работу балок за счет передачи поперечных сил:
1. Из узлов ЗРС, включая опорные, удаляются все связи, ответственные за передачу изгибающего момента (рис. 9.3, á);
218
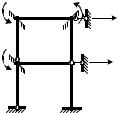
2.Выявляются линейные степени свободы по вертикальному направлению, для чего анализируется возможность перемещения каждой цепочки узлов, лежащих на одной вертикали (рис. 9.3, степени свободы показаны двунаправленными стрелками; если степень свободы не реализуется, она перечеркивается;
3.Выявляются линейные степени свободы по горизонтальному направлению, для чего анализируется возможность перемещения каждой
цепочки узлов, лежащих на одной горизонтали (рис. 9.3, ).
9.3. ОСНОВНАЯ СИСТЕМА МЕТОДА ПЕРЕМЕЩЕНИЙ
ЗРС с введенными дополнительными связями образует (рис. 9.4)
основную систему метода перемещений (ОСМП). |
3 |
4 |
Z4 |
||
Из данных рис. 9.4 следует, что для со- |
|||||
Z2 |
|
Z3 |
|||
здания ОСМП потребовалось три угловых |
|
||||
(nó = 3) и две линейные (n ë = 2) связи. Так что |
2 |
5 |
Z |
||
степень кинематической неопределимости ЗРС |
5 |
||||
Z1 |
|
|
|||
схемы определяется числом 5: |
|
|
|
||
N = n ó + n ë = 5 . |
(9.1) |
1 Ðèñ. 9.4 6 |
|
||
|
|
|
|||
9.4. КАНОНИЧЕСКАЯ СИСТЕМА УРАВНЕНИЙ МЕТОДА ПЕРЕМЕЩЕНИЙ
Полученное выше значение кинематической неопределимости означает, что порядок канонической системы уравнений метода перемещений равен пяти, что позволяет записать ее в следующем виде:
[r] {Z} + {R} = {0/} |
|
|
N |
|
|
|
|
|
|
|
|
|
|
||||
∑rij Zj + Ri = 0,j = 1, 2, …, N; |
|
||||||||||||||||
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
r11 |
r12 |
r1 3 |
r1 4 |
r1 5 |
Z1 |
|
|
R1 |
|
|
0 |
|
|||||
|
|
r2 2 |
r2 3 |
r2 4 |
r2 5 |
|
|
|
|
|
|
|
|
|
|
(9.2) |
|
r21 |
Z2 |
|
|
R2 |
|
|
0 |
||||||||||
r |
r |
r |
r |
r |
|
Z |
3 |
|
+ |
R |
|
= |
0 . |
|
|||
|
31 |
3 2 |
3 3 |
3 4 |
3 5 |
|
|
|
|
|
3 |
|
|
||||
|
r |
r |
r |
r |
r |
|
|
Z |
|
|
|
|
|
|
0 |
|
|
|
|
|
4 |
|
|
|
R |
|
|
||||||||
|
41 |
4 2 |
4 3 |
4 4 |
4 5 |
|
|
|
4 |
|
|||||||
|
r5 2 |
r5 3 |
r5 4 |
r5 5 |
|
Z5 |
|
|
|
|
|
0 |
|
||||
r51 |
|
|
|
|
|
R5 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Заметим, что использованные обозначения всех элементов КСУ метода перемещений являются традиционными при использовании этого метода в строительной механике.
219
9.5 СТАНДАРТНЫЕ ЭПЮРЫ МЕТОДА ПЕРЕМЕЩЕНИЙ
Вычисление коэффициентов и свободных членов КСУ проводится способом уравновешивания узлов с дополнительными связями. Причем уравнения равновесия в каждом узле с дополнительной связью формируются в таком виде, чтобы реакция поставленной связи вошла в это уравнение, т.е.:
•для реактивного момента записывается уравнение равновесия узла в моментах;
•для горизонтальной реакции – в проекциях сил, действующих в узле, на ось Õ глобальной системы координат;
•для вертикальной реакции – в проекциях сил, действующих в узле, на ось Y глобальной системы координат.
Важно отметить, что при составлении уравнений равновесия следует учитывать как внутренние усилия в сечениях, выделяющих узел
ñдополнительной связью, так и внешние сосредоточенные силы (моменты), действующие в этом узле.
Появление усилий в сечениях, выделяющих узлы в ОСМП, обусловлено двумя видами нагрузок на основную систему:
1. Нагрузка, приложенная к ЗРС, которая определяет коэффици-
åíòû Ri :
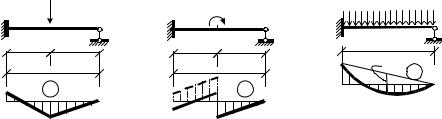
• нагружение силовой нагрузкой основных видов (рис. 9.5):
1 P 2
ul vl l
M
α = v e1 − v2j / 2 ;
γ= v e3 − v2j / 2;
δ= u2 b3 − ug / 2;
M1 = α Pl
Q1 = γ P ;
Q2 = δ P .
1 |
|
M 2 |
1 |
q |
2 |
|
|
||||
|
ul |
vl |
|
l |
|
|
|
l |
|
ql2/8 |
M |
|
1 |
|
|
|
|
> |
/3 |
|
|
|
|
2 |
|
|
|
|
|
v |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
/3 |
< |
1 |
|||
|
|
|
||
2 |
|
|
|
|
v |
|
|
|
|
α =
γ =
M1 = Q1 =
e1 − 3v 2 j
3 e1 − v 2j
αM ;
γM / l .
/2;
/2 ;
α = 1/ 8 ;
γ= 5 / 8 ;
δ= 3 / 8 ;
M1 = α q l 2 ; Q1 = γ q l ; Q2 = δ q l .
à |
á |
â |
Рис. 9.5 (начало)
220
1 |
P 2 |
1 |
M 2 |
1 |
q |
2 |
ul vl |
ul vl |
l |
l |
M |
M |
l |
|
ql2/8 |
M |
|
α |
= u v 2 ; |
|
|
|
β |
= vu 2 ; |
|
|
|
γ |
= v 2 1 + 2u |
; |
|
|
|
b |
g |
|
|
δ = u2 1 + |
2v ; |
|
|
|
|
b |
g |
|
|
M1 |
= α Pl ; |
M2 |
= β Pl ; |
|
Q1 |
= γ P ; |
Q2 |
= δ P . |
|
ã
α= v b2 − 3vg ;
β= u b2 − 3ug ; γ = 6 u v;
M1 = α M ;
M2 = β M ;
Q1 = Q2 = γ M / l .
ä
Рис. 9.5 (окончание)
α = 1/ 12 ; γ = 1 / 2 ;
M1 = M2 = α q l 2 ; Q1 = Q2 = γ q l .
å
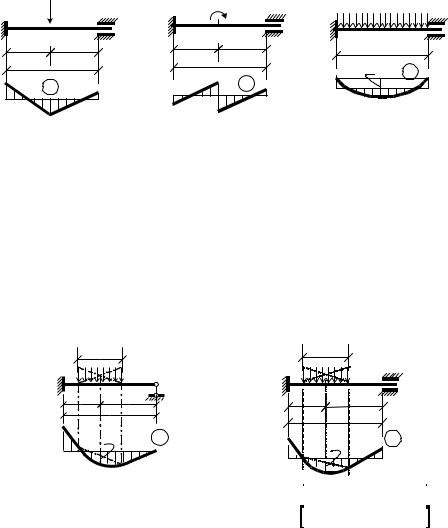
•нагружение участком распределенной нагрузки постоянной интенсивности, когда длина участка нагружения меньше, чем пролет балки (рис. 9.6):
|
wl |
|
1 |
q |
2 |
ul |
vl |
|
|
l |
|
wl
1
ul
l
q 2
vl
q(wl)2 /8 M |
q(wl)2/8 M |
1F
α= u vw G1 +
2H
γ= vw + α ;
δ= u w − α ;
M1 = α q l 2 ; Q1 = γ q l ; Q2 = δ q l .
v − w2 IJ ; 4u K
á
α=w 
 u v2 − w2b2v − ug / 12
u v2 − w2b2v − ug / 12 ;
;
β=w vu2 − w2b2u − vg / 12 ;
γ= vw + α − β ;
δ= u w − α + β;
M1 |
= α q l 2 ; M2 |
= β q l 2 ; |
Q1 |
= γ q l ; Q2 |
= δ q l . |
á
Ðèñ. 9.6
221
•нагружение неравномерным нагревом (рис. 9.7):
1 |
t1 |
h |
2 |
α ñòàëè |
= 13, 10 |
−5 |
1 |
; |
1 t1 |
|
|
|
|
|
|
oC |
|
||||
|
|
l t2 |
|
|
|
|
|
|
|
|
|
|
|
α ал˛миния |
= 2,0 10 |
−5 |
1 |
|
|
||
|
|
|
|
|
oC |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
 M
M
h
l t2
2
M
β = t1 − t2 > 0 ; γ = 3 / 2 ; |
β = t1 − t2 > 0 ; |
M1 = γ α β EJ / h ; |
M1 = α β E J / h = M 2 ; |
Q 1= γ α β EJ / bhlg = Q 2 . |
Q 1= 0 = Q2 . |
à |
á |
|
Ðèñ. 9.7 |
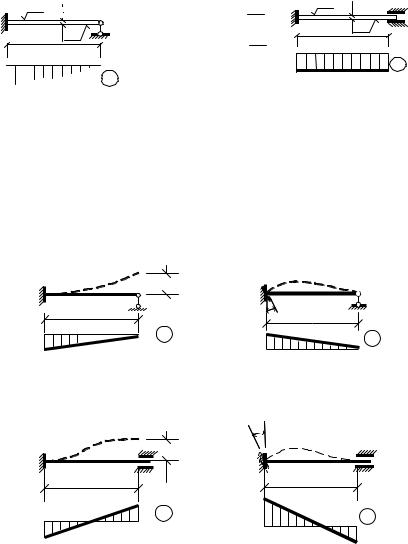
2. Нагрузка от каждого единичного перемещения (рис. 9.8) дополнительной связи с номером «i», приложенного независимо (она определяет коэффициенты при неизвестных Z j â i-й строке).
1 |
2 |
1 |
l 






 M
M
α = 3 ; |
γ = 3 ; |
|
|
M1 = α E J / l 2 ; |
|
|
|
Q = γ E J / l 3 = Q |
2 |
. |
|
1 |
|
|
|
à |
|
|
|
1 |
|
1 |
|
|
|
||
l |
|
|
|
|
|
M |
|
α = 6 ; |
γ = 12; |
|
|
M1 = M2 = α E J / l 2 ; Q1 = Q2 = γ E J / l 3 .
â
Ðèñ. 9.8
1 |
2 |
1 |
l |
|
|
|
M |
α = 3 ; |
γ = 3 ; |
M1 = α E J / l ;
Q 1= γ E J / l 2 = Q 2 .
1 á
1 |
2 |
|
|
|
l |
|
M |
α = 4; β = 2; γ = 6 ;
M1 = α E J / l ; M 2= β E J / l ; Q 1= γ E J / l 2 = Q 2 .
ã
222