

éD((11)) |
D((21)) |
K D((n1)) ù |
|||
ê |
(1) |
(2) |
K |
(n) |
ú |
êD(2) |
D(2) |
D(2) |
ú |
||
ê |
M |
M |
M |
M |
ú |
D(c) = ê |
(1) |
(2) |
M |
(n) |
ú . |
êD(k ) |
D(k) |
D(k ) |
ú |
||
ê |
M |
M |
M |
M |
ú |
ê |
ú |
||||
ê |
(1) |
(2) |
M |
(n) |
ú |
ëD(n ) |
D(n) |
D(n ) |
û |
||
Число строк в матрицах Rc и D(с) равно n – суммарному числу задаваемых смещений связей во всех вариантах воз- действий; число столбцов: в матрице Rc – числу определяе- мых перемещений b, в матрице D(с) – числу вариантов зада-
ваемых смещений связей n.
Знак "минус" в формуле (18.25) учитывается в единич-
ной матрице Е, число строк и столбцов которой равно n. E = diag [-1 -1 … -1 -1].
18.7. Определение перемещений от совместных воздействий различного характера
Ранее полученные матричные соотношения (18.8), (18.24) и (18.26) для определения перемещений в плоских
статически определимых стержневых системах отдельно от воздействий различного характера могут быть представлены единой матричной зависимостью:
DS = LT0 B0LS . |
(18.27) |
В формуле (18.27): Då – матрица перемещений в задан- ном сооружении; L0 – матрица усилий от единичных факто- ров, приложенных в направлении определяемых перемеще- ний; В0 – матрица общей податливости сооружения; Lå –
матрица характеристик состояния системы при заданных воздействиях.
Практический интерес представляет задача вычисления элементов матрицы перемещений сооружения от независи- мых друг от друга силовых, температурных и кинематиче-
|
5 |
|
Г Л А В А |
C |
Построение |
ётных схемахв элементарных |
эпюр усилий |
|
|
Г Л А В А 4 |
|
ПОСТРОЕНИЕ ЭПЮР |
УСИЛИЙ |
ВЭЛЕМЕНТАРНЫХ РАСЧЕТНЫХ СХЕМАХ
(ОПЕРАЦИОННЫЕ АЛГОРИТМЫ И ПРИМЕРЫ ИХ РЕАЛИЗАЦИИ)
кешение примеров осуществляется на основе операционных алгоритмов, которые в графической форме приведены в конце каждого параграфа настоящей главы.
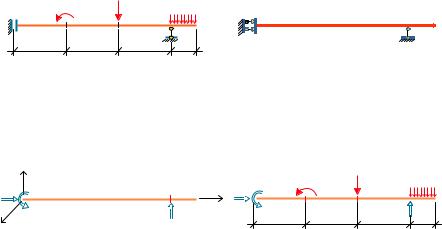
4.1. РАСЧЕТ ОДНОПРОЛЕТНОЙ БАЛКИ
за рис. 4.1 приведена заданная расчетная схема балки. Ее левая опора демонстрирует понятие «дефекта связи» по вертикальной реакции – частный случай кинематического шарнира (ползуна).
кис. 4.2 содержит вариант изображения опорных связей, при котором одной реакции соответствует один опорный стержень. Таким образом определяется количество реакций и их характер.
0,5qa2 |
qa |
|
q |
a |
a |
a |
0,5a |
|
Ðèñ. 4.1 |
|
Ðèñ. 4.2 |
за рис. 4.3 вводится система координат, оси которой определяют правило знаков для реактивных сил, заданных своими обозначениями. зеизвестные реакции считаются положительно направленными, как это показано на рис. 4.4.
|
Y |
X,Y,Z - глобальнаясистема |
|
|
|
0,5qa |
qa |
|
q |
|
|
с ра чет нойсхем е |
|
|
|
|
|||
XA A |
ркоо динатв, "призя анная"к |
B |
X X A A |
|
2 |
|
B |
|
|
|
|
|
|
|
|||||
Z |
Z A |
Y B |
Z A |
a |
a |
a |
Y B |
0,5a |
|
|
|
|
|
|
|||||
|
|
Ðèñ. 4.3 |
|
|
|
Ðèñ. 4.4 |
|
|
|
По рис. 4.4 назначаются уравнения равновесия и варианты их применения (4.1) для определения реакций.
83

XA ∑X = 0; |
|
|
(1) |
|
(2) |
|
(3) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
∑ |
Y = 0; |
|
|
( |
2 |
èëè |
( |
3 |
èëè |
1 |
; |
(4.1) |
||||
B |
|
|
|
|
) |
|
|
) |
|
( ) |
|
||||||
Z |
|
mom |
|
|
( |
3 |
|
|
1 |
|
|
( |
2 |
|
|
|
|
∑ |
= 0. |
|
|
) |
|
( ) |
|
|
) |
|
|
||||||
A |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
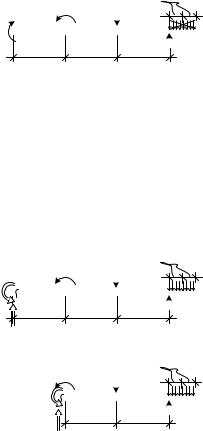
З дальнейшем определение реакций проводится в последовательности первого варианта уравнений (4.1). З частности, для XA имеем:
∑X = XA = 0 XA = 0.
Таким образом, одна из неизвестных реакций определена, и рис. 4.4 трансформируется в рис. 4.5, à.
A |
|
0,5qa2 |
qa |
B |
q |
A |
|
0,5qa2 |
qa |
q |
|
|
|
|
|
|
|
B |
|||
ZA |
a |
a |
a |
YB |
0,5a |
ZA |
a |
a |
a |
0,5a |
|
|
|
||||||||
|
|
à |
|
|
|
|
|
á |
|
1,5qa |
|
|
|
|
|
|
|
|
|
||
|
|
|
1,375qa2 |
0,5qa2 |
qa |
|
q |
|
|
|
|
|
|
A |
|
C |
|
|
B |
|
|
|
|
|
a |
0,5a 0,5a |
a |
|
0,5a |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
â |
|
1,5qa |
|
|
|
Ðèñ. 4.5
З соответствии со вторым уравнением первой последовательности (4.1) и рис. 4.5, à записываем:
∑Y = − qa +YB − q a2 = 0 YB = 1,5qa.
Заменяя на рис. 4.5, à обозначение реакции YB найденным вектором реакции, получаем рис. 4.5, á, по которому в соответствии с третьим уравнением первой последовательности (4.1) формируем уравнение равновесия для определения реакции ZA:
∑momB = ZA |
+ |
1 qa2 |
+ qa a − q |
1 a |
1 a = 0 |
|
|
Z = −11qa2 |
|
2 |
çàê- |
2 |
4 |
|
|
|
|
|
|
|
|||
= −1,375qa2. |
|
|
|
||||
A |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, реакции опорных связей определены. Это позволя-
ê
ет указать на расчетной схеме все нагрузки в явном виде («в значениях»), как это сделано на рис. 4.5, â. Данные этого рисунка используются
84
для проведения контроля правильности определения реакций опорных связей по уравнению:
∑momë |
= − |
11 |
qa |
2 |
+ |
1 |
qa |
2 |
− qa |
1 |
a |
+ |
3 |
|
|
1 |
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
||||||||||||||
|
8 |
|
2 |
|
2 |
2 |
qa |
2 |
a + a |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
− q |
1 |
a |
|
1 |
|
1 |
a + a + |
1 |
a |
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.2) |
|||||||||||||||
2 |
|
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
− 1 |
11 |
+ |
4 + 7 |
) |
qa2 |
+ |
1 |
2 + |
9 |
) |
qa2 |
= 0 |
− |
22 qa2 + |
11qa2 |
≡ 0. |
|
|
|
|
|
|
|
||||||||||||||||||||||
8 |
( |
|
|
|
|
|
|
|
|
|
|
4 ( |
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|||
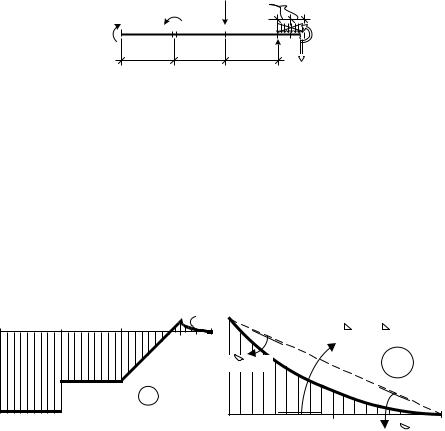
Переходим к назначению контролируемых сечений. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
за рис. 4.6 выделено три уча- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,25a |
||||||||||||||||||||||||||
стка с линейным законом измене- |
|
|
1,375qa2 |
0,5qa2 |
|
|
|
qa |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
q |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
ния изгибающего момента (1-2, |
|
|
|
|
|
1 |
|
2 |
|
|
|
3 |
|
4 |
|
|
|
5 |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
3-4, 4-5) и один участок – с пара- |
|
|
|
|
|
|
a |
|
|
|
|
|
|
a |
|
|
|
a |
|
|
|
|
6 7 |
||||||||||||||||||||||
болическим законом |
|
(5-7). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,5qa |
||||||||||||||||||||||||
Сечения 2 и 3 позволяют учесть |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
наличие сосредоточенного момента |
|
|
|
|
|
|
|
|
|
Ðèñ. 4.6 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
нагрузки, а сечение 6 – описать за- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
кон параболы по трем значениям ординат момента на участке 5-7.
З соответствии с правилом, согласно которому эпюра изгибающего момента строится на растянутыхк волокнах ( З), далее при вычислении значений внутреннего момента в контролируемых сечениях по методу се- чений (рис. 4.7) будем использовать следующие обозначения:
•«кЗ/З», когда растянутые волокна поперечного сечения расположены поверху балки;
•«зкЗ/ », когда растянутые волокна поперечного сечения распо-
ложены понизу балки. |
|
|
|
|
|
|
|
|
|
|
|
|
0,25a |
|
|
|||||||||||||||||||
|
|
∑mom1 |
|
|
|
|
|
|
+ 1 qa2 |
|
|
|
M1-2 |
0,5qa2 |
|
qa |
|
|
||||||||||||||||
|
|
= M1−2 |
|
− qa 2a + |
|
q 5 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
2 |
3 |
4 |
|
|
|
|
|
|
|
|
||
|
|
3 |
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
7 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
+ |
2 |
qa 3a − q |
2 |
a |
4 |
a + 3a |
= 0 |
|
|
|
|
a |
|
a |
|
|
a |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1-2 |
|
|
|
|
1,5qa |
à |
|||||||||||||
|
|
|
|
|
|
= −11qa2 (êÇ/ç). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
1−2 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,25a |
|
|
||||||||
|
|
|
|
|
|
|
|
|
+ 1 qa2 |
|
|
|
|
|
|
|
0,5qa2 |
|
qa |
|
|
|||||||||||||
|
|
∑mom2 |
= M2−1 |
− qa a + |
|
|
|
|
|
q5 |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
2 |
3 |
4 |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
M2-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
7 |
|||||||
|
3 |
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
a |
|
|
a |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
+ |
2 |
qa 2a − q |
2 |
a |
|
a + 2a |
= 0 |
|
|
|
|
Q2-1 |
|
|
|
|
á |
|||||||||||||||||
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
1,5qa |
|||||||||||||||
|
|
|
|
M2−1 |
|
= − |
11qa2 (êÇ/ç). |
|
|
|
|
|
|
Рис. 4.7 (начало) |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
85

|
|
|
qa |
0,25a |
|
|
|
|
q5 |
|
|
|
3 |
4 |
|
|
|
|
M3-4 |
|
|
6 |
7 |
|
|
a |
|
||
|
Q3-4 |
|
a |
|
|
â |
|
|
1,5qa |
|
|
|
qa |
0,25a |
|
|
|
q5 |
|
|
|
4 |
|
|
|
|
M4-3 |
|
6 |
7 |
ã |
Q4-3 |
|
a |
|
|
1,5qa |
|
||
|
|
|
|
|
|
|
|
0,25a |
|
|
4 |
|
q |
|
|
M4-5 |
|
5 |
|
|
|
6 |
7 |
|
ä |
Q4-5 |
|
a |
|
|
|
1,5qa |
|
|
|
|
|
|
0,25a
|
M5-4 q5 |
6 |
7 |
|
å |
|
|||
1,5qa Q5-4 |
||||
|
||||
|
0,25a |
|
||
|
M5-6 q5 |
6 |
7 |
|
æ |
|
|||
|
Q5-6 |
|||
|
0,25a |
|
||
|
|
q |
|
|
|
M6-5 |
6 |
7 |
|
ç |
Q6-5 |
|||
|
|
|||
|
0,25a |
|
||
|
|
q |
|
|
|
M6-7 |
6 |
7 |
|
è |
|
|||
Q6-7 |
|
|||
|
|
|||
Рис. 4.7 (продолжение)
∑mom3 = M3−4 − qa a + 32 qa 2a −
−q |
1 |
a |
1 |
|
|
|
|
|||
2 |
|
|
a + 2a = 0 |
|||||||
|
|
4 |
|
|
|
|
||||
M |
3 |
−4 |
= − |
7 qa2 (êÇ/ç). |
||||||
|
|
|
8 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
∑mom4 |
= |
M4−3 |
+ |
3 qa |
a − |
|||||
|
|
|
|
|
|
|
|
|
2 |
|
−q |
1 |
a |
|
1 |
a + a |
|
|
|||
2 |
|
4 |
= 0 |
|||||||
|
|
|
|
|
|
|
|
|
||
M4−3 = − |
7 qa2 |
(êÇ/ç). |
||||||||
|
|
|
|
|
|
8 |
|
|
|
|
M4−5 = M4−3
Сравните рис. 4.7, ã è ðèñ. 4.7, ä.
∑mom5 = M5−4 − q 12 a 14 a = 0
M5−4 = 81 qa2 (êÇ/Ç).
Сравните рис. 4.7, å è ðèñ. 4.7, æ.
∑mom6 = M6−5 − |
|
||||||||
−q |
1 |
|
1 |
|
1 |
|
= 0 |
|
|
4 |
a |
4 |
a |
||||||
|
|
2 |
|
|
|
|
|||
M |
|
= |
1 |
|
qa2 (êÇ/Ç); |
||||
−5 |
|
|
|||||||
6 |
32 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
M6-7 |
= M6−5 |
|
|
||||
Сравните рис. 4.7, ç è ðèñ. 4.7, è.
86
|
|
|
|
|
1,375qa2 |
0,5qa2 |
|
qa |
|
|
|
|
0,25a |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
M7-6 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
|
2 |
3 |
|
|
4 |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
a |
|
|
|
a |
|
|
a |
|
|
|
|
6 |
|
7 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
1,5qa |
|
Q7-6 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.7 (окончание) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
∑mom7 |
= − |
11 |
qa |
2 |
+ |
1 |
qa |
2 |
|
|
|
|
|
|
|
1 |
a |
|
− |
3 |
qa |
1 |
a + |
|
|
|
|
|||
|
8 |
|
2 |
|
+ qa a + |
2 |
|
2 |
2 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
+q |
1 a |
1 |
1 a |
+ M |
|
= |
1 − |
|
11 + |
6 |
) |
− |
( |
4 +12 |
+1 |
qa2 |
+ M |
7−6 |
= |
|
|
||||||||||
|
2 |
|
2 |
|
|
|
7−6 |
|
8 |
|
( |
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
= 0 qa2 + M |
|
= 0 |
M |
7−6 |
= |
0. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
7−6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
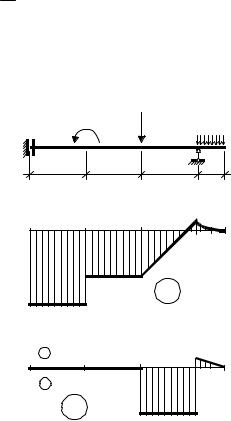
По данным рис. 4.7 построена эпюра изгибающих моментов, кото- |
|||||||||||||||||||||||||||||||
рая изображена на рис. 4.8, à. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
0,125 |
|
0,03125 |
0,125 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
(1/8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
2,3 |
|
|
|
4 |
|
|
(1/8) |
|
(1/32) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q 5-7 = Q 7-5 > 0 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
5 |
6 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
> 0 |
|
|
|
|
|
0,03125 |
|
M |
, qa2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5-7 |
|
|
|
|
|
|
|
|
|
(1/32) |
|
|
|
5-7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,875 |
|
|
|
M , qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
(7/8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,0 |
||||
1,375 |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
7 |
|
(11/8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q 7-5 < 0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
à |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
á |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Ðèñ. 4.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Зычисление ординат Qi-j эпюры поперечного усилия по формулам (4.3) включает:
• разложение криволинейной эпюры изгибающих моментов на уча- стке на линейную часть Q и параболическую Q ;
•вычисление модулей тангенсов соответствующих углов;
•присвоение «инженерного» знака этим значениям (см. рис.4.8, á);
•вычисление значения поперечного усилия путем алгебраического сложения полученных составляющих:
87
Q1−2 |
= ± |
|
| tgM(l1−2) |= ± |
11 |
− |
11 |
|
|
2 |
/ a |
|
= 0 = Q2−1; |
|
|
||||||||||||||||||
|
|
|
|
|
8 |
qa |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Q3−4 |
= ± |
|
| tgM(l3−4) |= ± |
|
7 |
|
− |
7 |
2 |
|
/ a |
|
= 0 = Q4− 3; |
|
|
|||||||||||||||||
|
|
|
|
|
|
8 |
qa |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Q4−5 |
= ± |
|
tgM(l4− 5) |
|
= − |
|
|
7 |
+ |
1 |
|
|
2 |
/ a |
|
= −qa = Q5−4; |
|
|||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
8 |
8 |
qa |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Q |
= ± |
|
tgM (l |
5− 7 |
) |
|
± |
|
tgM (ò. 5) |
|
|
= |
|
|
|
|
|
|
|
|
||||||||||||
5−7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
|
(4.3) |
||
|
|
|
|
1 qa2 − |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
1 q |
|
|
|
|
|
|
|
|
|
|
|
1 qa + |
1 q 1 a |
|
1 qa; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
= + |
|
|
8 |
|
|
|
|
± |
|
5−7 |
l |
5−7 |
|
= + |
= |
||||||||||||||||
|
|
1 |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
4 |
|
|
2 2 |
|
2 |
||||||||
|
|
|
|
2 a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tgM (ò. 7) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Q |
= ± |
|
tgM (l |
7−5 |
) |
|
± |
|
|
|
= |
|
|
|
|
|
|
|
|
|||||||||||||
7−5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 qa2 − 0 |
|
|
|
|
1 q |
|
|
|
|
|
|
|
|
|
|
|
|
1 qa − |
1 q 1 a = |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
= + |
|
|
8 |
|
|
|
± |
|
|
−5 |
l |
7−5 |
|
= + |
0. |
||||||||||||||||
|
|
1 |
|
|
|
7 |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
4 |
|
|
2 2 |
|
|
|||||||||
|
|
|
|
2 a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По результатам вычислений (4.3) построена эпюра поперечного усилия, изображенная на рис. 4.9. Зычисление значений продольного усилия в однопролетной балке при отсутствии нагрузок, направленных вдоль оси балки, производить не следует, поскольку любое уравнение равновесия в проекциях на ось удовлетворяется тождественно.
|
|
|
|
|
1 |
2 |
qa |
Ç |
|
0,25a |
|
|
|
|
+ |
|
0,5 |
|
— qa |
|
|
|
|
|
|
|
|
1 |
|
0,0 |
2 |
|
|
|
D |
q |
|
1 |
2 |
||
2,3 |
4 |
2 |
3 |
4 |
|
||||||||
|
|
|
|
|
— qa |
|
|||||||
|
– |
|
5 |
7 |
11 |
|
|
|
|
5 |
6 |
32 |
|
|
|
|
|
a |
|
|
0,5a |
0,5a |
|
|
|
||
|
|
|
|
—qa 2 |
|
|
|
|
|
||||
|
|
Q , qa |
|
|
8 |
|
|
|
1,5qa |
0,25qa |
|
||
|
|
|
|
расчетная |
|
|
|
||||||
1,0
Ðèñ. 4.9 |
Ðèñ. 4.10 |
Контроль правильности определения ординат эпюр усилий для заданной расчетной схемы проводится для произвольной части балки (рис. 4.10). Соответствующие уравнения равновесия и вычисления по ним представлены формулами:
∑momD |
= − |
11qa2 |
+ |
1 qa2 + qa 1 a + |
3 qa |
1 a − |
|
|
|
|
|
|
|||||||||||
|
|
8 |
|
|
|
2 |
|
|
|
2 |
|
|
2 |
2 |
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
1 |
|
1 |
|
1 |
|
|
1 |
|
1 |
|
1 |
|
|
1 |
|
2 |
|
|
−q |
|
a |
|
a + |
|
|
|
a |
− |
|
qa |
a + |
|
a |
− |
|
qa |
|
= |
|||
|
4 |
2 |
2 |
4 |
4 |
2 |
32 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|||||||
88
= −qa2 |
11 + |
5 |
+ |
3 |
+ |
1 |
|
+ qa2 |
1 |
+ |
1 |
+ |
3 |
|
= |
(4.4) |
|
|
|
|
2 |
4 |
|||||||||||
8 32 16 32 |
|
2 |
|
|
|
|
|
|||||||||
= − 321 qa2 (44 + 5 + 6 +1) + 18 qa2 (2 + 2 + 3) ≡ 0;
∑Y = −qa + 32 qa − 14 qa − q 14 a ≡ 0.
Уравнения равновесия отрезанной части заданной расчетной схемы удовлетворяются тождественно, что свидетельствует о значительной достоверности проведенных построений.
|
|
0,5qa2 |
qa |
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
a |
|
0,5a |
à |
||
|
|
|
|
||||||
|
|
|
|
(1/8)(1/32) |
|
||||
1 |
|
2,3 |
4 |
0,125 |
0,0312 |
|
|||
|
|
|
|
5 |
|
|
|||
|
|
|
|
|
5 |
6 |
7 |
|
|
|
|
|
0,785 |
M |
, qa2 |
|
|
||
|
|
|
(7/8) |
|
á |
||||
|
|
1,375 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(11/8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
(1/2) |
|
|
|
|
1 |
+ |
2,3 |
4 |
|
0,5 |
|
0,0 |
|
|
|
- |
|
|
|
5 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q , qa |
|
|
|
|
|
â |
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
Ðèñ. 4.11 |
|
|
|
|
|
|
кешение задачи о построении эпюр усилий в однопролетной балке представлено рис. 4.1, рис. 4.8, à и рис. 4.9. Собранные вместе (рис. 4.11) именно эти рисунки представляют собой собственно решение задачи, поскольку, в конечном итоге, ïóòü получения необходимых данных (ординат M è Q) может быть и иным.
за рис. 4.12 приведен операционный алгоритм решения поставленной задачи, реализованный в данном примере.
89
90
Виды уравнений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
равновесия |
|
|
|
|
|
|
|
Глобальная |
Оптимальный |
|
Реакции |
|
|
|||||||||||||
на плоскости. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Виды опорных связей , |
|
|
|
|
|
|
система |
|
объем |
|
|
определены |
|
|
||||||||||||
их изображения |
|
|
|
|
|
|
|
координат |
|
вычислений |
|
|
верно |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.3. |
|
|
|
|
|
|
|
*А |
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.1. |
|
|
Рис. 4.2. |
|
Рис. 4.4. |
Ф.(4.1). |
|
Рис. 4.5. |
Ф.(4.2). |
|
|||||
|
q k |
|
|
|
|
= q ; |
|
|
|
|
|
Рис. 4.6. |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
Заданная |
|
|
Опорные |
Дополни- |
Нагрузки |
Система |
|
Определение |
Контроль |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
расчетная |
|
|
стержни |
|
ельные |
в обозна- |
уравнений |
|
опорных |
правильности |
Нагрузки |
||||
|
P |
|
|
|
|
|
|
= qa; |
|
|
|
|
в значениях |
|||||||||||||
|
k |
|
|
|
|
|
|
|
схема |
|
|
|
|
|
|
нагрузки |
чениях |
для опорных |
реакций |
определения |
|
|||||
|
M |
|
|
|
|
|
|
= qa 2 ; |
|
|
|
|
|
|
|
|
|
реакций |
|
|
опорных |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
реакций |
|
|
||
|
l k |
|
|
= a |
|
|
|
|
|
|
|
|
Ошибки в определении реакций |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поиски исправление ошибок |
|
|
|
|
Рис. 4.11. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эпюры |
Заданная |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
расчетная |
|||
|
|
|
|
|
|
|
|
|
|
Рис. 4.6. |
|
|
|
|
|
|
|
|
|
|
|
построены |
схема. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.8, a. |
Рис. 4.8. |
|
|
верно |
Эпюры M, Q |
||||
|
|
|
|
|
|
|
|
|
|
*А |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номера |
Рис. 4.7. |
Рис. 4.8, a. |
Рис. 4.8, б. |
Ф.(4.3). |
Рис. 4.9. |
Ф.(4.4) , |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
контроли- |
Определение |
Эпюра M |
Знаки |
Определение |
Эпюра Q |
рис. 4.10. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
руемых |
изгибающих |
|
|
поперечного |
значений Qi-j |
|
|
Контроль |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
сечений |
моментов Mi-j |
|
|
усилия Qi-j |
|
|
|
правильности |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эпюр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ошибки в определении усилий |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поиск и исправление ошибок |
|
|
|
|
|
|
||
Ðèñ. 4.12