4.4. РАСЧЕТ ФЕРМЫ С ТРЕУГОЛЬНОЙ РЕШЕТКОЙ (АНАЛИТИЧЕСКИЙ СПОСОБ)
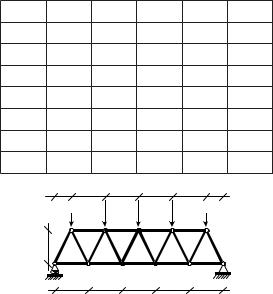
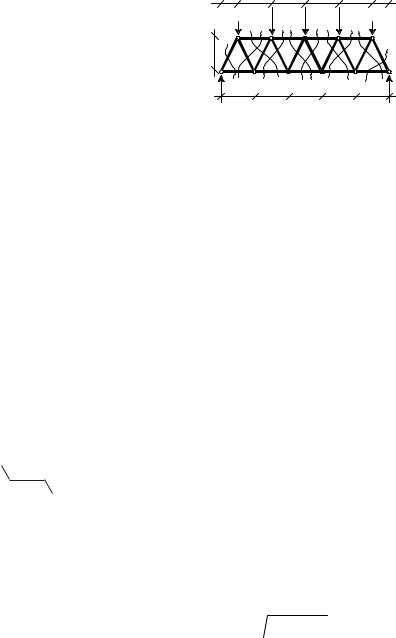
Особенностью расчетной схемы типа ферма (рис. 4.41) является наличие в сечениях ее стержней только Фродольных усилий, что обеспе- чивается как способом приложения нагрузки (сосредоточенные силы в узлах-шарнирах), так и способом соединения стержней фермы в узлах расчетной схемы – безмоментными шарнирами (рис.4.42).
0,5a a |
a |
|
|
a |
|
|
a 0,5a |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5P |
|
|
|
P |
|
P |
|
P |
|
0,5P |
||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
a
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
a |
a |
|
|
a |
|||||||||||||||||||||
|
|
|
|
|
|
Ðèñ. 4.41 |
|
Ðèñ. 4.42 |
|
|
|
|
|
|||||||||||||||||||
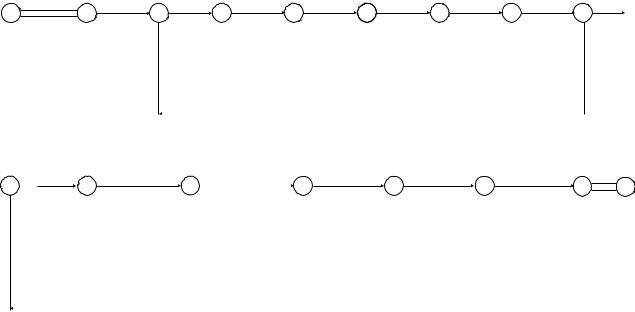
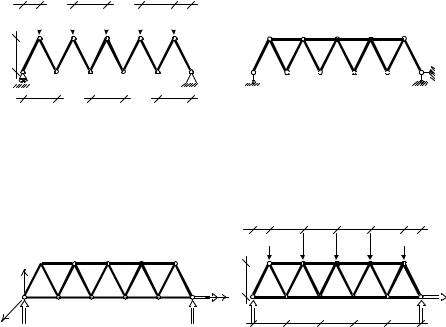
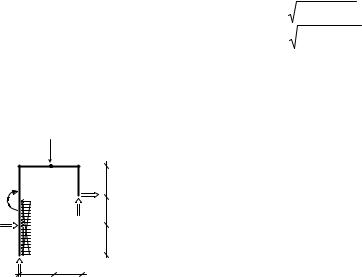
На рис. 4.43 вводится система координат, оси которой определяют правило знаков для реактивных сил, заданных своими обозна- чениями. Реакции до их определения считаются Фоложительно направленными, как это проиллюстрировано на рис. 4.44.
X,Y,Z - глобальная система координатпривязанная, " к "
расчетной схеме
Y
XB X
YA YB
Z
Ðèñ. 4.43
0,5a a |
a |
a |
a |
0,5a |
||
0,5P |
P |
P |
P |
|
0,5P |
|
|
|
|
|
|||
a |
|
|
|
|
XB |
|
|
|
|
|
|
||
YA |
|
|
|
|
YB |
|
a |
a |
a |
a |
a |
||
|
||||||
Ðèñ. 4.44
Ïî |
данным рис. 4.44 назначаются уравнения равновесия (4.13) |
|||
для определения реакций опорных связей: |
|
|||
YA |
∑momB = 0; |
(1) |
(4.13) |
|
YB |
∑Y = 0; |
(2) |
||
|
||||
XB |
∑X = 0. |
(3) |
|
|
Для определения реакции YA составим и решим первое уравнение последовательности (4.13):
114
∑mom B = −YA 5a + |
1 |
|
F |
|
1 |
I |
|
|
F |
1 |
|
|
I |
|
|
|
|
|||
2 |
P |
H |
5a − |
2 |
K |
|
|
H |
2 |
a |
|
K |
|
|
|
|
||||
|
G |
|
aJ + P G5a − |
|
− aJ + |
|
|
|
|
|||||||||||
+ P F |
5a − 1 a − |
2aI |
+ |
P F |
5a − |
1 a − 3aI |
+ |
1 P F |
5a − |
1 a − 4aI |
= |
|||||||||
|
|
G |
|
2 |
|
J |
|
|
G |
|
2 |
|
J |
|
G |
|
2 |
J |
|
|
|
A |
H |
|
|
K |
|
|
H |
g |
|
K |
A |
2 H |
|
K |
|
||||
|
|
|
4 b |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
= −Y |
|
5a + |
1 |
9 |
+ |
14 +10 + |
6 +1 |
= 0 Y |
|
= 2P . |
|
|
|
|
||||||
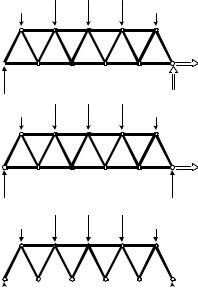
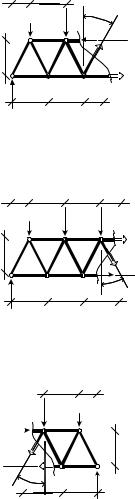
Наличие значения и направления реакции YA позволяет трансформировать рис. 4.44 в рис. 4.45, à.
0,5P |
P |
P |
P |
0,5P |
|
|
|
||
|
|
|
|
XB |
2P |
|
à |
|
YB |
|
|
|
||
0,5P |
P |
P |
P |
0,5P |
|
|
|
||
|
|
|
|
XB |
2P |
|
á |
|
2P |
|
|
|
|
|
0,5P |
P |
P |
P |
0,5P |
|
|
|
В соответствии со вторым уравнением последовательности (4.13), привлекая данные рис. 4.45, à, записываем:
∑Y = 2P − 12 P − P −P − P
− 12 P +YB = 0 YB = 2P.
Заменив на рис. 4.45, à обозначение реакции YB найденным вектором, получаем рис. 4.45, á, по которому составляем третье уравнение последовательности (4.13) – для определения XÂ:
∑X = XB = 0 XB = 0.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, реакции опор- |
|||||
2P |
|
|
|
C |
|
|
|
|
|
|
|
|
|
2P |
|
ных связей определены. Это позво- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ляет указать на расчетной схеме |
|||||||||
|
|
â |
|
|
|
|
|
|
|
|
|
|
|
все нагрузки в явном виде («в |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Ðèñ. 4.45 |
|
|
|
|
|
|
|
|
значениях»), как это сделано на |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ðèñ. 4.45, â. Данные |
этого рисун- |
||||||
êà |
|
используются |
|
äëÿ |
|
проведения контроля правильности определе- |
|||||||||||||||||||
íèÿ |
реакций опорных |
|
|
связей по |
|
уравнению: |
|
|
|||||||||||||||||
|
|
∑mom C = −2P 2a + |
1 |
|
F |
1 |
|
I |
P |
1 |
a |
F |
1 |
I |
|||||||||||
|
|
2 |
P Ga + |
2 |
aJ + |
2 |
− P Ga − |
2 |
aJ − |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
K |
|
|
H |
K |
|||||
|
|
|
|
|
|
− P Fa + 1 aI |
− 1 P F2a + |
1 aI |
+ |
2P 3a = |
|
(4.14) |
|||||||||||||
|
|
|
|
|
|
|
|
|
G |
2 |
|
J |
2 |
G |
|
|
J |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
H |
|
K |
H |
|
2 K |
|
|
|
|
|||||||
|
|
|
|
|
|
− |
1 Pa |
16 |
+ 2 + 6 + |
5 |
+ 1 Pa |
3 |
+ 2 + 24 |
≡ 0. |
|||||||||||
|
|
|
|
|
|
|
4 |
|
b |
|
|
|
|
|
g |
4 |
|
|
b |
g |
|
|
|||
115
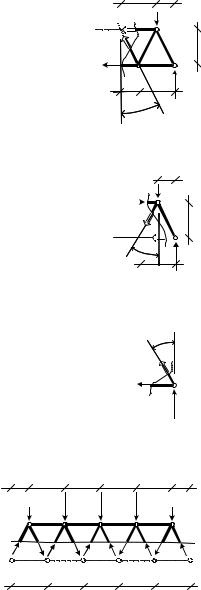
Далее, в соответствии с операционным алгоритмом, требуется указать виды сечений, порядок их следования (рис. 4.46), а также уравнения, которые нужно составить для определения усилий в стержнях, попавших в соответствующие сечения последовательности:
0,5a |
a |
a |
a |
a |
0,5a |
0,5P |
P |
P |
P |
0,5P |
|
2 C B4 D E6 |
F G8 H J10 |
||||
A |
|
|
|
|
K |
a |
|
|
|
|
|
1 |
3 |
5 |
7 |
9 |
11 |
AB |
D |
C F E H |
G |
K J |
|
a |
|
a |
a |
a |
a |
2P |
|
Ðèñ. 4.46 |
|
2P |
|
|
|
|
|
||
g |
|
|
12 |
|
|
∑ |
Y = 0; |
|
13 |
|
∑ |
X = 0 ; |
|
|
|
1 A − A: |
N |
|
|
|
N |
|
|
|
|
|
|||||
2g |
B − B : |
N2 3 ∑Y = 0; |
N2 4 |
∑mom 3 |
= 0; |
|
|||||||||
3g |
C − C : |
N3−4 ∑Y = 0 ; |
N3−5 |
∑mom 4 |
= 0; |
|
|||||||||
4g |
D − D: |
N 4−5 |
∑Y = 0 ; |
N 4−6 |
∑mom 5 |
= 0; |
(4.15) |
||||||||
5g |
E − E : |
N5−6 |
∑Y = 0; |
N5−7 |
∑mom 6 |
= 0; |
|||||||||
|
|||||||||||||||
6g |
F − F : |
N6−7 |
∑Y = 0; |
N6−8 |
∑mom 7 |
= 0; |
|
||||||||
7g G −G : |
N7−8 ∑Y = 0; |
N 7−9 |
∑mom 8 |
= 0 ; |
|
||||||||||
8g H − H : |
N8−9 ∑Y = 0; |
N8−10 |
∑mom 9 |
= 0; |
|
||||||||||
9g |
J − J : |
N9−10 ∑Y = 0 ; |
N9−11 ∑mom10 = 0; |
|
|||||||||||
10g K − K : N10−11 ∑Y = 0 . |
|
|
|
|
|
|
|
||||||||
Уравнение в Фроекциях сил рекомендуется применять тогда, когда нельзя составить уравнение в моментах.
Уравнение в моментах требует вычисления расстояния от точки приведения до линии действия усилия, а уравнение в проекциях сил – вычисления значений тригонометрических функций угла между осями стержней. Эти задачи решаются через значения координат узлов фермы (табл. 4.1) по формулам аналитической геометрии.
Таблица 4.1
Óçëû |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
Коорд-ты |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
X i , a |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
|
Y i , a |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
Вычисление расстояния d(k, i-j) от точки k с координатами (Xk , Yk ) до прямой, проходящей через точку i с координатами (Xi, Yi è) точку j, имеющую координаты (Xj , Y,j ) осуществляется по формуле:
d(k,i − j) = (Ai, j Xk + Bi, j Yk + Ci, j) /  Ai2, j + Bi2, j ,
Ai2, j + Bi2, j ,
116
где использованы обозначения:
A |
i, j |
= − Y |
−Y |
i i |
; |
B |
i, j |
= X |
j |
− X |
i |
; C |
i, j |
= X |
Y |
j |
− X |
j |
Y |
. |
|
d j |
|
|
|
|
|
|
i |
|
|
i |
|
Тригонометрические функции углов между прямыми, проходящими через точки i-j è k-l, заданные своими координатами, определяются формулами:
tan(α i−j, k−l) = |
|
|
Ai, j Bk,l |
− Ak,l Bi, j |
|
; |
|
|
|
|
||||||||||
|
|
Ai, j Ak,l |
+ Bi, j Bk,l |
|
|
|
|
|
||||||||||||
sin(α i−j, k−l) = |
Ai, j Bk,l |
− Ak,l Bi, j |
|
; |
|
|
|
|
||||||||||||
|
|
|
|
Di,j Dk,l |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
cos(α i−j, k−l) = |
|
Ai, j Ak,l |
+ Bi, j Bk,l |
|
, |
|
|
|
|
|||||||||||
|
|
|
|
Di,j Dk,l |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где использованы обозначения |
|
|
|
|
|
|
|
|
|
|||||||||||
A |
i, j |
= − Y |
−Y |
i i |
; |
B |
i, j |
= X |
j |
− X |
i |
|
; D |
i,j |
= A2 |
+ B 2 |
; |
|||
|
|
d j |
|
|
|
|
|
|
|
|
|
i, j |
i, j |
|
||||||
A |
k,l |
= − Y |
−Y |
k i |
; |
B |
k,l |
= X |
l |
− X |
k |
; D |
k,l |
= A2 |
+ B 2 |
. |
||||
|
d l |
|
|
|
|
|
|
k,l |
k,l |
|
||||||||||
Положительный угол между прямыми определяется в результате поворота прямой i-j вокруг точки пересечения Фротив часовой стрелки до совмещения с прямой k-l.
Располагая системой нагрузок «в значениях», системой сечений (см. рис. 4.46), координатами узлов расчетной схемы (см. табл. 4.1) и форму-
|
qa |
|
|
D |
a |
|
|
|
2qa2 |
C XC |
|
XB Ç |
YC |
a |
|
|
|
0,5q |
|
|
|
|
a |
A |
|
|
YA a |
a |
|
Рис. 4.47 (начало)
лами для вычисления «плеч» сил при составлении уравнений моментов, можно приступать к непосредственному определению продольных усилий в стержнях заданной расчетной схемы фермы (рис. 4.47).
Важно отметить, что неизвестные усилия на рисунке отсеченной части расчетной схемы счи- таются положительными (действуют «от узла»), а их истинный («инженерный») знак устанавливается решением соответствующего уравнения:
Y |
|
|
∑ |
mom |
C |
= 0; |
|
|
|
Y |
|
|
∑ |
mom |
B |
= 0; |
|
|
A |
|
|
|
|
|
|
(1) |
ë |
|
|
|
|
|
(1) |
||||
|
|
∑ |
momслева = |
0; |
|
|
|
∑ |
mom |
сФрава = 0; |
|
|||||||
XB |
|
|
|
Xë |
|
|
|
|||||||||||
|
|
|
|
D |
|
|
|
|
|
|
|
D |
|
|
||||
XC |
∑X = 0; |
|
|
|
(2) |
èëè XB |
∑X = 0; |
|
|
(2) |
||||||||
YC |
∑Y = 0. |
|
|
|
|
(3) |
YA |
∑Y = 0. |
|
|
|
(3) |
||||||
117
∑Y = 2P − 1 P − N2−3 cos β = |
||
2 |
|
|
= 2P − 1 P − N2−3 0,894 = 0 |
||
2 |
|
|
N2−3 ≈ 1,68P(растяжение); |
||
∑mom3 = −2P a + 1 P |
1 a − N2−4h3, 2−4 = |
|
|
2 |
2 |
= −2P a + 1 P |
1 a − N2−4 a = 0 |
|
2 |
2 |
|
N2−4 = −1,75P(сжатие); |
|
|
|
|
B-B |
|
|
P/2 |
B |
|
|
|
2 |
N2-4 |
3,2-4 |
|
||
|
N2-3 |
||
h |
1 |
|
|
|
|
|
|
0,5a |
B P |
3 |
|
|
|
||
|
2P |
β |
|
|
|
á |
|
∑Y = 2P − |
1 P + N3−4 cos β = |
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 2P − 1 P + N3 4 0,894 = 0 |
|
|||||||||||||
N3−4 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
≈ −168,P |
(сжатие) ; |
F 1 |
|
|
|
I |
|||||||||
∑mom 4 |
|
F |
|
1 |
I |
|
|
1 |
|
|
1 |
||||
|
H |
|
2 |
K |
+ |
2 |
H |
2 |
a + |
2 |
K |
||||
= −2P Ga + |
|
aJ |
|
P G |
|
|
|
aJ + |
|||||||
|
|
+ N3−5 h4, 3−5 = −3P a + |
1 P a + |
||||||||||||
|
|
+ N3−5 a = 0 |
|
|
|
|
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
N3−5 |
= 2,5P (растяжение) ; |
|
|
|
|
|
|
||||||||
∑Y = 2P − |
1 P − P − N 4−5 cos β = |
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 2P − 3 P − N 4−5 0,894 = |
0 |
|
||||||||||||
N4−5 |
≈ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,559P |
(растяжение) ; |
|
|
|
I |
|
|
||||||||
∑mom 5 |
= −2P ba + ag + |
1 |
|
|
F |
|
1 |
|
|
||||||
2 |
P |
H |
|
2 |
K |
|
|
||||||||
|
Ga + |
|
|
aJ + |
|
||||||||||
+ P 12 a − N 4−6 h5, 4−6 =
= −4P a + 54 P a − − N 4−6 a = 0
N4−6 = −2,75P (сжатие) ;
Рис. 4.47 (Фродолжение)
|
C-C |
|
|
|
0,5a |
β |
|
|
0,5P2 |
C 1,75P |
|
5 |
|
4 |
N3-4 |
|
|
||
4,3- |
|
|
|
h |
1 |
3 |
N3-5 |
|
|||
|
|
C |
|
|
a |
0,5a |
|
|
2P |
|
|
|
|
â |
|
D-D
|
0,5a |
a |
P |
||
|
0,5P |
||||
|
2 |
|
4 D N4-6 |
||
6 |
|
|
|
N4-5 |
|
5,4- |
|
|
|
||
1 |
3 |
2,5P |
|||
h |
|||||
|
a |
D |
a |
β 5 |
|
|
|
|
|||
2P
ã
118
E-E
|
0,5a |
|
a |
β |
|
|
|
||
|
0,5P |
|
|
|
|
||||
|
P E 2,75P |
6 |
|
|
|||||
|
2 |
|
|
4 |
|
|
|
|
|
7 |
|
|
|
|
|
N5-6 |
|||
6,5- |
|
|
|
|
|
||||
h |
1 |
|
3 |
5 |
|
|
|
N5-7 |
|
|
|
|
|
|
|||||
|
|
|
|
|
0,5aE |
||||
|
|
a |
|
a |
|
|
|||
|
2P |
|
|
ä |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F-F |
|
|
|
|
|
|
0,5a |
|
a |
a |
0,5a |
|
|||
|
P/2 |
P |
|
P |
|
|
|
||
|
|
|
|
|
N |
|
|||
|
2 |
|
|
4 |
6 |
F |
6-8 |
||
|
|
|
|
|
|
||||
7,6-8 |
|
|
|
|
|
|
|
N |
|
h |
1 |
|
3 |
5 |
|
3P |
|
6-7 |
|
|
|
|
|
7 |
|
||||
|
|
a |
|
a |
F |
a |
β |
|
|
|
|
|
|
|
|
|
|||
|
2P |
|
|
å |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G-G |
|
|
|
|
|
|
|
|
|
a |
0,5a |
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
2,75PG 8 |
H 10 |
P/2 |
|
|
|
||||
|
N8-7 |
|
|
|
|
8,7-9 |
|
|
|
|
|
N9-7 |
|
h |
|
|
|
||
|
|
|
11 |
|
|
|
|||
|
7β |
|
G 9 |
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
a |
a |
|
|
|
|
|
|
|
|
|
|
2P |
|
|
|
|
æ
cos β ≈ 0,894;sin β ≈ 0,447 ; h 6, 5−7 = a ;
∑Y = 2P − |
1 P − P + N |
5−6 cos β = |
||||
|
|
2 |
|
|
|
|
|
= 2P − |
3 P + N5−6 0,894 = 0 |
||||
N5−6 |
|
2 |
|
|
|
|
≈ −0,559P (сжатие) ; |
|
|||||
∑mom 6 |
|
F |
1 |
I |
1 |
|
|
H |
2 |
K |
2 |
P 2a + |
|
= −2P G2a + |
|
aJ + |
|
|||
+P a + N5−7 h6,5−7 =
=−5P a + 2P a + N5−7 a = 0
N5−7 = 3P (растяжение) ;
cos β ≈ 0,894; sin β ≈ 0,447; h 7,6−8 |
= a; |
|||||||||||||
∑Y = 2P − |
1 P − P − P − N6−7 cos β = |
|||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
= 2P − |
5 P − N6−7 0,894 = 0 |
||||||||||||
N6−7 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
≈ −0,559P |
(сжатие) ; |
|
|
I |
||||||||||
∑mom 7 |
|
|
|
|
1 |
|
F |
|
|
1 |
|
|||
= −2P 3a + |
2 |
|
H |
|
+ |
2 |
|
K |
||||||
|
|
|
P G2a |
|
aJ + |
|||||||||
|
|
|
F |
|
1 |
|
I |
|
|
1 |
|
|
|
|
|
|
|
H |
|
2 |
|
K |
|
|
2 |
a |
− N6−8 h7, 6−8 = |
||
|
|
+ P Ga + |
|
|
|
aJ + P |
|
|||||||
|
= −6P a + |
13 P a − |
N6−8 a = 0 |
|||||||||||
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
N6−8 |
= −2,75P (сжатие) ; |
|
|
|
|
|
||||||||
cos β ≈ 0,894; sin β ≈ 0,447; h8, 7−9 |
= a; |
|||||||||||||
∑Y = 2P − 1 P − P − N8−7 cos |
β = |
|
|
|||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
= 2P − |
3 P − N8−7 0,894 = 0 |
|
|
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
N8−7 ≈ 0,559P(растяжение); |
|
|
|
|
||||||||||
∑mom8 |
= |
|
1 |
|
|
|
1 |
P a − N9−7h8, 7−9 = |
||||||
2P a + |
2 |
a − |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
= 3P a − |
1 P a − N9−7 a = 0 |
|
|
|||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
N9−7 = 2,5P(растяжение); |
|
|
|
|
|
|||||||||
Рис. 4.47 (Фродолжение)
119

 =
= =
=