

 0,0835
0,0835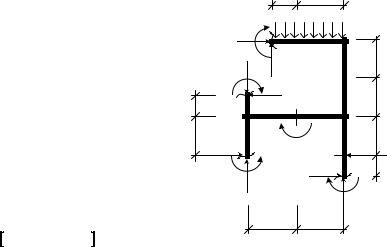
216
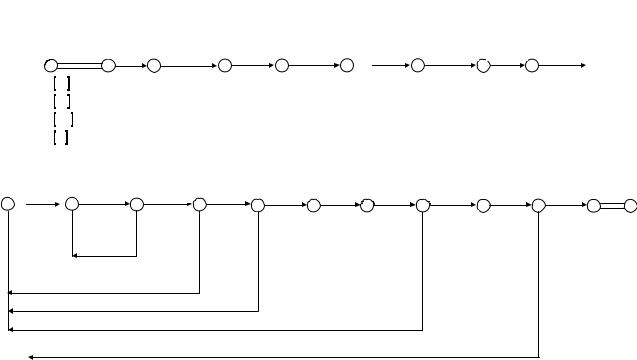
Алгоритмы |
|
|
|
|
|
|
|
|
|
Структура эпюр |
Алгоритм |
|
|
|
|
|
||||
построения |
|
|
|
|
|
|
|
|
построения |
|
|
|
|
|
||||||
эпюр |
|
|
|
|
|
|
|
|
|
|
изгибающих |
эпюры |
|
Алгоритм |
|
|
||||
определяющих |
|
|
|
|
|
|
|
|
моментов |
моментов |
|
|
|
|||||||
|
|
|
|
Структура |
Надежность |
Рис. 8.12. |
формирования |
|
|
|||||||||||
усилий в |
|
|
|
|
|
от заданной |
в сложной |
|
|
|||||||||||
элементарных |
|
|
|
|
внутренних |
работы |
|
нагрузки |
статически |
Схема |
матрицы |
|
|
|||||||
расчетных |
|
|
|
W<0 |
|
и внешних |
исполнителя |
и реакций |
определимой |
дискрети- |
минимального |
|
|
|||||||
схемах |
|
|
|
|
связей |
|
|
|
лишних связей |
раме |
зации |
размера |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
*А |
|
|
|
|
*B |
|
|
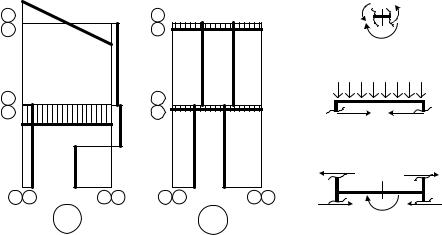
q |
|
|
= q ; |
|
Рис. 8.2. |
Ф. (8.1), рис. 8.3. |
Рис. 8.4-8.11. |
Рис. 8.5. |
Рис. 8.12. |
Рис. 8.13. |
Ф. (8.4). |
|
Ф. (8.5)-(8.10). |
|
|
|||||
|
k |
|
|
|
Заданная |
Количественная |
Качественная |
Выбор |
|
Формирование |
Грузовая и |
Матричная |
|
Формирование |
|
|
||||
Pk |
= qa |
; |
расчетная |
сторона |
|
сторона |
|
оптимального |
схемы |
направляющие |
форма |
|
матрицы |
|
|
|||||
схема |
|
кинематического |
кинемати- |
варианта |
дискретизации |
эпюры |
грузовой и |
|
податливости |
|
|
|||||||||
M |
|
= qa 2 ; |
|
ческого |
|
изгибающего |
направля- |
|
ЗРС |
|
|
|||||||||
k |
|
|
анализа |
|
анализа |
|
ОСМС |
|
ЗРС |
|
момента |
ющих |
|
|
|
|
||||
|
|
|
|
|
|
|
|
(варианты |
|
|
|
|
в ОСМС |
эпюр |
|
|
|
|
||
l k |
|
= a |
|
|
|
|
|
ОСМС) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Точность |
|
|
|
|
|
Точность |
Матричная |
|
Алгоритм |
Алгоритм |
|
Все |
Рис. 8.2, |
?; |
|||
Матричная |
|
|
|
|
|
|
|
Контроль |
решения |
решения |
|
этапы |
рис. 8.14, |
|||||||
|
|
решения - |
|
Решение |
|
|
вычислений |
форма |
|
задачи для |
задачи для |
|
контроля |
рис. 8.15 . |
|
|||||
форма |
|
|
не менее 4-х |
|
|
- не менее |
деформа- |
подтвердил |
статически |
статически |
|
подтвердили |
Решение |
|
||||||
вычислений |
|
|
значащих |
|
СЛАУ |
|
|
3-х значащих |
ционной |
|
правильность |
определимых |
определимых |
правильность |
задачи |
|
||||
*B |
|
|
цифр |
|
верное |
|
|
цифр |
|
проверки |
|
вычислений |
рам |
рам |
|
построений |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф. (8.11)-(8.12). |
|
Ф. (8.13)-(8.15.) |
Ф. (8.16)-(8.18). |
Ф. (8.19)-(8.20). |
Ф. (8.21). |
Ф. (28.2)- |
|
Рис. 8.14. |
Рис. 8.15. |
Рис. 8.16-8.17 |
|
|
|
|||||||
Вычисление |
|
|
Решение КСУ |
Контроль |
Контроль |
Вычисление |
(8.23). |
|
Восстанов- |
Построение |
Контроль |
|
|
|
|
|||||
матриц |
|
|
|
|
|
правильности |
правильности |
матрицы |
Контроль |
|
ление |
эпюр |
правиль- |
|
|
|
|
|||
коэфициентов |
|
|
|
|
|
вычислений |
вычислений |
ординат |
правильности |
эпюры |
поперечных |
ности |
|
|
|
|
||||
и свободных |
|
|
|
|
|
матрицы |
матрицы |
эпюры |
|
вычислений |
изгибающих |
и продольных |
проведенных |
|
|
|
|
|||
членов КСУ |
|
|
Контроль |
|
коэфициентов |
свободных |
изгибающих |
изгибающих |
моментов |
усилий в ЗРС |
построений |
|
|
|
|
|||||
|
|
|
|
КСУ |
|
членов |
|
моментов |
моментов |
|
в ЗРС по ее |
|
|
|
|
|
|
|||
|
|
|
решения СЛАУ |
|
|
КСУ |
|
в ЗРС |
|
в ЗРС |
|
матричной |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
форме |
|
|
|
|
|
|
Поиск и исправлениеошибок вычислений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Поиск и исправление ошибок вычислений |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
Поиск и исправление ошибок вычислений |
|
|
|
|
|
|
|
|
|
|
|
|||||
*А |
|
|
|
|
|
|
|
|
|
|
Ошибка по построении грузовой и (или) направляющих эпюр |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Поиск и исправление ошибок построений эпюр в ОСМС |
|
M |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Ðèñ. 8.18 |
|
|
|
|
|
|
|
|
|

