Основы высшей математики для инженеров 2009
.pdf
 [( (
[( (




4.9. Геометрический смысл полного дифференциала |
233 |
Таким образом, вторая производная вектор функции равна уско рению движения материальной точки в данный момент времени t. В этом заключается механический смысл второй производной.
4.9. Геометрический смысл полного дифференциала
Уравнения касательной прямой и нормальной плоскости к пространст венной кривой. Касательная плоскость и нормаль к поверхности. Гео метрический смысл полного дифференциала функции двух переменных.
4.9.1.Уравнения касательной прямой и нормальной плоскости
кпространственной кривой
На предыдущей лекции было показано, что вектор r(t) направлен по касательной к годографу радиуса вектора OM r(t). Пусть про странственная кривая задана параметрическими уравнениями x ((t), y >(t), z K(t).
Найдем уравнения касательной к этой кривой в некоторой ее точ ке M0(x0, y0, z0), соответствующей параметру t t0.
Очевидно, эти |
уравнения имеют вид |
|
|
|||||
|
M62 |
|||||||
|
|
x x0 |
|
y y0 |
|
z z0 |
, |
|
|
|
m |
|
|
||||
|
|
|
n |
p |
||||
где m, n, p — проекции направляющего вектора прямой. Так как век тор r (t0) ((t0)i > (t0)j K(t0)k направлен по касательной к кривой в точке M0, то его проекции могут быть приняты за проекции направ ляющего вектора. Тогда искомые уравнения примут вид
x x0 y y0 z z0 .
((t0) > (t0) K(t0)
Нормальной плоскостью к пространственной кривой называется плоскость, перпендикулярная к касательной прямой и проходящая че рез точку касания.
Пусть M0(x0, y0, z0) — точка касания. Уравнение плоскости, прохо дящей через точку M0, имеет вид
A(x x0) B(y y0) C(z z0) 0,
где А, В, С — проекции нормального вектора N (A, B, C) этой плоско сти. Из определения нормальной плоскости следует, что за вектор N
234 Глава 4. Дифференциальное исчисление функций многих переменных
можно принять вектор r (t0) (( (t0), > (t0), K(t0)). Поэтому уравнение нормальной плоскости имеет вид
((t0)(x x0) > (t0)(y y0) K(t0)(z z0) 0.
П р и м е р. Найти уравнения касательной прямой и нормальной
плоскости к винтовой линии x 2 cost, y 2 sin t, z |
t |
в точке M0, со |
||||||||||||||||||||||||
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
ответствующей значению параметра t0 |
|
' |
. |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
Решение. x 0, |
y |
2, z |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
0 |
|
|
0 |
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x (t0) 2 sin |
' |
2; |
|
|
|
y (t0) 2 cos |
' |
0; |
|
z (t0) |
1 |
. |
||||||||||||||
2 |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
' |
|
|||||||
|
|
|
|
|
|
|
z |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
x 0 |
|
|
|
y 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 |
|
|
x ' 2'z, |
y 2 |
|||||||||||||||||||
|
|
0 |
|
|
|
|||||||||||||||||||||
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
— уравнения касательной прямой; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
x |
|
z |
2 |
0 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
M62 |
|
|
|
|
|
||||||||||||||||
— уравнение нормальной плоскости.
4.9.2. Касательная плоскость и нормаль к поверхности
Касательной плоскостью к поверхности в точке M0 (точке касания) называется плоскость, в которой лежат все касательные в точке M0 к различным кривым, проведенным на поверхности через эту точку.
Нормалью к поверхности называется перпендикуляр к касатель ной плоскости в точке касания.
Уравнение плоскости имеет вид
A(x x0) B(y y0) C(z z0) 0,
где вектор с координатами А, В, С перпендикулярен плоскости. Пусть поверхность задана уравнением z f (x, y); M0(x0, y0, z0) —
точка, лежащая на ней. Рассмотрим линию L, лежащую на поверхно сти и проходящую через точку M0(x0, y0, z0). Ее параметрические урав нения x x(t), y y(t), z z(t) причем x0 x(t0), y0 y(t0), z0 z(t0).
4.9. Геометрический смысл полного дифференциала |
235 |
Уравнение поверхности можно переписать в виде |
|
F(x, y, z) z f (x, y) 0. |
(1) |
Так как точка M0 принадлежит поверхности, то z0 f (x0, y0) 0. Про дифференцируем равенство (1) по t:
HF x (t) HF y (t) HF z (t) 0.
Hx Hy Hz
При t t0 получим
Fx(x0, y0, z0) x (t0) Fy(x0, y0, z0) y (t0) Fz(x0, y0, z0) z (t0) 0.
Отсюда следует, что вектор
r (t0) x (t0) i y (t0) j z (t0) k
перпендикулярен вектору с координатами Fx, Fy, Fz. Но вектор r (t0) направлен по касательной к линии L в точке M0. Следовательно, в ка честве нормального вектора к касательной плоскости можно взять вектор с координатами Fx, Fy, Fz. Заметим, что
HF |
f , |
HF f , |
HF |
1. |
|
|
|
||||
Hx |
x |
Hy |
y |
Hz |
|
|
M62 |
|
|
||
Поэтому уравнение касательной плоскости имеет вид z z0 fx(x0, y0)(x x0) fy(x0, y0)(y y0).
Вектор { fx, fy,1} направлен по нормали к поверхности, следова тельно, он перпендикулярен к касательной прямой, проведенной к поверхности в точке M0, поэтому уравнения нормали в точке M0 име ют вид
x x0 |
|
y y0 |
|
z z0 |
. |
|
|
|
|||
fx(x0, y0) |
fy(x0, y0) |
1 |
|
||
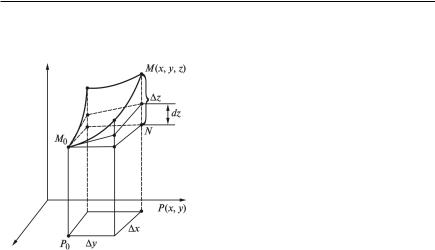
4.9.3. Геометрический смысл полного дифференциала функции двух переменных
Пусть функция z f (x, y) имеет в точке P0(x0, y0) дифференциал
dz fx(x0, y0) -x fy(x0, y0) -y или |
|
dz fx(x0, y0)(x x0) fy(x0, y0)(y y0). |
(2) |
236 Глава 4. Дифференциальное исчисление функций многих переменных
Рассмотрим уравнение касательной плоскости
Z z0 fx(x0, y0)(x x0) fy(x0, y0)(y y0). |
(3) |
(Мы обозначили через Z аппликату точки касательной плоскости, чтобы отличить ее от аппликаты z точки по верхности.) Мы видим, что правая часть этого уравнения совпадает с правой частью выражения (2) для дифференциала dz. Следовательно, и левые части этих равенств равны. Но в равенстве (2) левая часть есть диф ференциал функции z f (x, y) в точке P0(x0, y0), а в уравнении (3) левая часть есть приращение аппликаты ка сательной плоскости.
Таким образом, геометрический смысл дифференциала функции двух переменных заключаетсяM62в следующем: дифференциал функ ции двух переменных равен приращению аппликаты касательной плоскости.


238 Глава 5. Интегральное исчисление функций многих переменных
Так как функция f)(x, ) B-)) непрерывна в замкнутой области, то
f)(x, ) B-)) f (x, )) 1,
где 1 — величина, зависящая от x, ), -), стремится к 0 при -) 0. Таким образом,
J() -)) J ()) |
b |
b |
|
D f)(x, ))dx D1dx. |
|||
-) |
|||
a |
a |
||
|
|||
Переходя к пределу в обеих частях последнего равенства при -) 0, получим
b |
7b |
: |
b |
|
J)()) D f)(x, ))dx; |
9D f (x, ))dx< |
D f)(x, ))dx. |
||
a |
9 |
< |
|
a |
8a |
;) |
|||
Последняя формула носит название формулы Лейбница. Предположим теперь, что в интеграле не только подынтегральная
функция, но и пределы интегрированияM62зависят от ):
b())
J()) ([), a()), b())] D f (x, ))dx.
a())
Функция ([), a()), b())] является сложной функцией ). Поэтому для вычисления ее производной применим правило дифференцирова ния сложной функции:
J ()) |
H( |
|
H( |
|
da |
|
H( |
|
db |
. |
(1) |
|
|
|
|
|
|||||||
|
H) Ha d) Hb d) |
|
|||||||||
Так как производная определенного интеграла с переменным верхним пределом по этому пределу равна значению подынтегральной функ ции, в которую вместо переменной интегрирования подставлено зна чение верхнего предела, то
|
|
|
H( |
|
H |
b |
|
||
|
|
|
|
D f (x, ))dx f [b()), )], |
|||||
|
|
|
Hb |
Hb |
|||||
|
|
|
|
a |
|
||||
|
|
|
|
|
|
|
|||
H( |
|
H |
b |
|
|
|
H |
a |
|
|
D f (x, ))dx |
D f (x, )) f [a()), )]. |
|||||||
Ha |
Ha |
Ha |
|||||||
|
a |
|
|
|
b |
||||
|
|
|
|
|
|
|
|||