

Линейные сети
|
purelin, DPURELIN |
Линейная функция активации |
Блок Simulink:

Синтаксис:
|
A = purelin(N) info = purelin(code) |
dA_dN = dpurelin(N,A) |
Описание:
Функция A = purelin(N) реализует линейную функцию активации во всем диапазоне изменения входного аргумента.
Функция info = purelin(code) сообщает информацию о функцииpurelin.
Функция dA_dN = dpurelin(N, A) вычисляет производную функцииpurelin.
Пример:
Информация о функции активации purelin:
name = purelin('name')
dname = purelin('deriv')
inrange = purelin('active')
outrange = purelin('output')
name = Linear
dname = dpurelin
inrange = –Inf Inf
outrange = –Inf Inf
Зададим следующий вектор входа линейной функции активации для слоя из трех нейронов и рассчитаем вектор выхода Aи производнуюdA_dN:
N = [0.1; 0.8; –0.7];
-
A = purelin(N)
dA_dN = dpurelin(N,A)
A =
0.1000
0.8000
–0.7000
dA_dN =
1
1
1
Применение функции:
Функция активации purelin используется при формировании нейронных сетей с помощью М-функцийnewlinиnewlind. Для задания функции активацииpurelinследует установить значение свойстваnet.layers{i}.transferFcnравным'purelin'.
Алгоритм:
Функция активации purelin и ее производнаяdpurelinопределяются следующими соотношениями:
![]() ;
;
![]() .
.
Сопутствующие функции: sim, satlin, satlins.
|
POSLIN, DPOSLIN |
Положительная линейная функция активации |
Блок Simulink:
![]()
Синтаксис:
|
A = poslin(N) info = poslin(code) |
dA_dN = dposlin(N,A) |
Описание:
Функция A = poslin(N) реализует положительную линейную функцию активации.
Функция info = poslin(code) сообщает информацию о функцииposlin.
Функция dA_dN = dposlin(N, A) вычисляет производную функцииposlin.
Пример:
Информация о функции активации poslin:
name = poslin('name')
dname = poslin('deriv')
inrange = poslin('active')
outrange = poslin('output')
name = Positive Linear
dname = dposlin
inrange = 0 Inf
outrange = 0 Inf
Зададим следующий вектор входа положительной линейной функции активации для слоя из трех нейронов и рассчитаем вектор выхода Aи производнуюdA_dN:
N = [0.1; 0.8; –0.7];
-
A = poslin(N)
dA_dN = dposlin(N,A)
A =
0.1000
0.8000
0
dA_dN =
1
1
0
Применение функции:
Для задания функции активации poslinследует установить значение свойстваnet.layers{i}.transferFcnравным'poslin'.
Алгоритм:
Функция активации poslinи ее производнаяdposlinопределяются следующими соотношениями:


Сопутствующие функции: SIM, PURELIN, SATLIN, SATLINS.
|
satlin, DSATLIN |
Линейная функция с ограничениями |
Блок Simulink:
![]()
Синтаксис:
|
A = satlin(N) info = satlin(code) |
dA_dN = dsatlin(N,A)
|
Описание:
Функция A = satlin(N) реализует линейную функцию активации с ограничениями.
Функция info = satlin(code) сообщает информацию о функцииsatlin.
Функция dA_dN = dsatlin(N, A) вычисляет производную функцииsatlin.
Пример:
Информация о функции активации satlin:
name = satlin('name')
dname = satlin('deriv')
inrange = satlin('active')
outrange = satlin('output')
name = Saturating Linear
dname = dsatlin
inrange = 0 1
outrange = 0 1
Зададим следующий вектор входа линейной функции активации с ограничениями для слоя из трех нейронов и рассчитаем вектор выхода Aи производнуюdA_dN:
N = [0.1; 0.8; –0.7];
-
A = satlin(N)
dA_dN = dsatlin(N,A)
A =
0.1000
0.8000
0
dA_dN =
1
1
0
Применение функции:
Для задания функции активации satlinследует установить значение свойстваnet.layers{i}.transferFcnравным'satlin'.
Алгоритм:
Функция активации satlin и ее производная dsatlinопределяются следующими соотношениями:


Сопутствующие функции: SIM, POSLIN, SATLINS, PURELINS.
|
satlinS, DSATLINS |
Симметричная линейная функция с ограничениями |
Блок Simulink:

Синтаксис:
|
A = satlins(N) info = satlins(code) |
dA_dN = dsatlins(N, A) |
Описание:
Функция A = satlins(N) реализует симметричную линейную функцию активации с ограничениями.
Функция info = satlins(code) сообщает информацию о функцииsatlins.
Функция dA_dN = dsatlins(N, A) вычисляет производную функцииsatlins.
Пример:
Информация о функции активации satlins:
name = satlins('name')
dname = satlins('deriv')
inrange = satlins('active')
outrange = satlins('output')
name = Symmetric Saturating Linear
dname = dsatlins
inrange = –1 1
outrange = –1 1
Зададим следующий вектор входа симметричной линейной функции активации с ограничениями для слоя из трех нейронов и рассчитаем вектор выхода Aи производнуюdA_dN:
N = [0.1; 0.8; –0.7];
-
A = satlins(N)
dA_dN = dsatlins(N,A)
A =
0.1000
0.8000
–0.7000
dA_dN =
1
1
1
Применение функции:
Для задания функции активации satlins следует установить значение свойстваnet.layers{i}.transferFcnравным'satlins'.
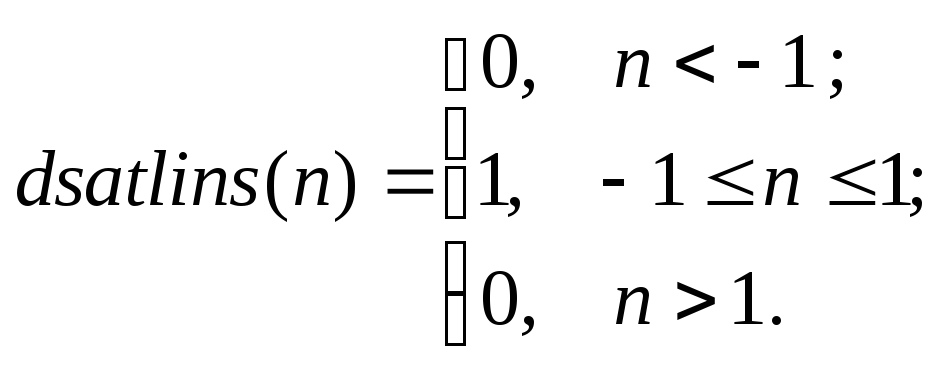
Алгоритм:
Функция активации satlins и ее производнаяdsatlinsопределяются следующими соотношениями:

Сопутствующие функции: SIM, POSLIN, SATLIN, PURELINS.