

Сети – классификаторы входных векторов
|
neWLVQ |
Нейронная сеть LVQ |
Синтаксис:
net = newlvq(PR,S1,PC,LR,LF)
Описание:
Нейронные сети-классификаторы входных векторов, или сети LVQ,в отличие от самоорганизующихся сетей выполняют не только кластеризацию, но и классификацию входных векторов.
Функция net = newlvq(PR, s1, PC, lr, lf) формирует сеть LVQи имеет следующие входные и выходные аргументы.
Входные аргументы:
PR – массив размера R2изQминимальных и максимальных значений вектора входа;
s1– число нейронов скрытого слоя;
PC – вектор размера 1S2, указывающий распределение по долям векторов каждого класса;
lr– параметр скорости настройки, по умолчанию 0.01;
lf– функция настройки, по умолчаниюlearnlv2.
Выходные аргументы:
net – объект класса network object, определяющий сеть-классификаторLVQ.
Свойства сети:
Сеть LVQ – это двухслойная сеть. Первый слой использует функции взвешиванияnegdist, накопления netsumи активацииcompet. Второй слой использует функции взвешиванияdotprodt, накопления netsumи активацииpurelin. Слои не имеют смещений. Веса первого слоя инициализируются с помощью функцииmidpoint; веса второго слоя устанавливаются так, чтобы каждому нейрону на выходе соответствовал единственный нейрон скрытого слоя. Адаптация и обучение выполняются с помощью функцийadaptwbиtrainwb1, которые модифицируют веса первого слоя, используя заданные функции обучения. Функциями настройки могут быть М-функцииlearnlv1 иlearnlv2.
Пример:
Векторы входа P и выходные классы Tc, представленные ниже, определяют задачу классификации, которая будет решена LVQ-сетью:
P = [–3 –2 –2 0 0 0 0 +2 +2 +3;
0 +1 –1 2 1 –1 –2 +1 –1 0];
Tc = [1 1 1 2 2 2 2 1 1 1];
Целевые классы Tc преобразуем в целевые векторы T, создадим сеть LVQ со входами P, четырьмя нейронами и долями распределения по классам [0.6 0.4]:
T = ind2vec(Tc);
net = newlvq(minmax(P),4,[.6 .4]);
gensim(net) % Рис.11.32
Структура нейронной сети LVQ показана на рис. 11.32. Выполним обучение сети:
|
|
|


Рис. 11.32
net = train(net,P,T);
Промоделируем сеть на векторе входа:
Y = sim(net,P);
Yc = vec2ind(Y)
Yc = 1 1 1 2 2 2 2 1 1 1
Классификация входного вектора выполнена без ошибок.
Сопутствующие функции: SIM, INIT, ADAPT, TRAIN, ADAPTWB, TRAINWB1, LEARNLV1, LEARNLV2.
Рекуррентные сети
|
neWELM |
Нейронная сеть ELM |
Сеть Элмана
Синтаксис:
net = newelm(PR, [S1 S2 ... SNl], {TF1 TF2 ... TFNl}, btf, blf, pf)
Описание:
Функция newelm предназначена для создания динамических сетей Элмана, которые применяются для построения моделей динамических систем.
Функция net = newelm(PR, [S1 S2 ... SNl], {TF1 TF2 ... TFNl},btf,blf,pf) формирует сеть Элмана и имеет следующие входные и выходные аргументы.
Входные аргументы:
PR – массив размера R2 минимальных и максимальных значений для R векторов входа;
Si – количество нейронов в слоеi;
TFi– функция активации слояi, по умолчаниюtansig;
btf– обучающая функция, реализующая метод обратного распространения, по умолчаниюtraingdx;
blf– функция настройки, реализующая метод обратного распространения, по умолчаниюlearngdm;
pf– критерий качества обучения, по умолчаниюmse.
Выходные аргументы:
net– объект класса network objectдинамической сети Элмана.
Свойства сети:
Обучающими функциями могут быть любые функции, реализующие метод обратного распространения: trainlm,trainbfg,trainrp,traingdи др.
Функциями настройки могут быть функции, реализующие метод обратного распространения: learngd,learngdm.
Критерием качества обучения может быть любая дифференцируемая функция: mse,msereg.
При реализации сети Элмана не рекомендуется применять такие алгоритмы обучения, как trainlmилиtrainrp, которые работают с большим размером шага.
Пример:
Зададим вход P в виде случайной булевой последовательности из нулей и единиц; выходом сети должна быть такая булева последовательность T, элементы которой принимают значение 1 только в том случае, когда в последовательности P встретились 2 единицы подряд:
P = round(rand(1,20))
T = [0 (P(1:end–1)+P(2:end)==2)]
P = 1 0 1 0 1 1 0 0 1 0 1 1 1 1 0 0 1 1 0 1
T = 0 0 0 0 0 1 0 0 0 0 0 1 1 1 0 0 0 1 0 0
Требуется построить сеть, которая распознает во входном сигнале 2 единицы, следующие подряд. Сначала эти последовательности представим в виде массивов ячеек:
Pseq = con2seq(P); Tseq = con2seq(T);
Создадим сеть Элмана с диапазоном входного сигнала от 0 до 1 с 10 скрытыми и одним выходным нейронами (рис. 11.33):
net = newelm([0 1],[10 1],{'tansig','logsig'});
gensim(net) % Рис.11.33
|
|
|

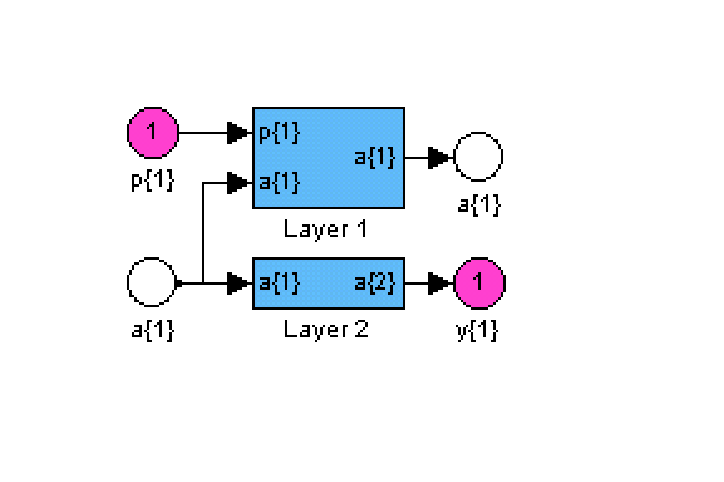



Рис. 11.33
Затем обучим сеть с допустимой средней квадратичной ошибкой 0.001 и смоделируем ее:
net.trainParam.goal = 0.001;
net.trainParam.epochs = 1000;
net = train(net,Pseq,Tseq);
Y = sim(net,Pseq)
Y1 = seq2con(Y);
E = round(T–Y1{1})
E = 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Результат свидетельствует о том, что сеть справилась с поставленной задачей.
Алгоритм:
Сеть Элмана состоит из Nlслоев, использующих функции взвешиванияdotprod, накопленияnetsumи заданные пользователем функции активации. Все слои имеют смещения. Выход последнего слоя является выходом сети. Веса и смещения инициализируются с помощью функцииinitnw. Адаптация реализуется с помощью функцииadaptwb, которая настраивает веса с помощью заданной функции настройки.
Сопутствующие функции: NEWFF, NEWCF, SIM, INIT, ADAPT, TRAIN.
|
neWHOP |
Сеть Хопфилда HOP |
Синтаксис:
net = newhop(T)
Описание:
Сети Хопфилда применяются для решения задач распознавания образов.
Функция net = newhop(T) имеет 1 входной аргумент – массив T размера RQ, объединяющий Q целевых векторов (со значениями +1 или –1), R – число элементов вектора входа.
Функция возвращает рекуррентную сеть Хопфилда в виде объекта класса network object.
Свойства:
Сеть Хопфилда имеет 1 нейронный слой с функциями взвешивания dotprod, накопленияnetsumи активации satlins. Слой охвачен динамической обратной связью и имеет смещения.
Пример:
Создадим сеть Хопфилда с двумя устойчивыми точками в трехмерном пространстве:
T = [–1 –1 1; 1 –1 1]';
net = newhop(T);
gensim(net) % Рис.11.34


Рис. 11.34
Проверим, что сеть устойчива в этих точках, и используем их как начальные условия для линии задержки. Если сеть устойчива, можно ожидать, что выходы Y будут те же самые.
Ai = T;
[Y,Pf,Af] = sim(net,2,[],Ai);
Y =
–1 1
–1 –1
1 1
Таким образом, вершины гиперкуба являются устойчивыми точками равновесия сети Хопфилда.
Проверим сходимость сети при произвольном входном векторе Ai:
Ai = {[–0.9; –0.8; 0.7]};
[Y,Pf,Af] = sim(net,{1 5},{},Ai);
Y{1}
ans =
–1
–1
1
Сеть Хопфилда обеспечила переход к устойчивому положению равновесия, ближайшему к заданному входу.
Алгоритм:
Сети Хопфилда разработаны для того, чтобы приводить случайные входные векторы к точкам равновесия, которые соответствуют определенным, заданным пользователем, целям. Алгоритм минимизирует число устойчивых паразитных точек равновесия [25].
Сопутствующие функции: sim, satlins.