

9.1.4. Моделирование нестационарного фильтра
В отличие от описанного выше стационарного фильтра рассмотрим задачу идентификации и моделирования нестационарной системы.
Постановка задачи
Допустим, что на вход фильтра подается входной сигнал вида r(t) = sin(8sin(4t)*t), заданный массивом значений R с тактом квантования 0.005 с на интервале 6 с:
time1 = 0:0.005:4;
time2 = 4.005:0.005:6;
time = [time1 time2];
R = sin(sin(time*4).*time*8);
plot(time,R)
axis([0 6 –1.1 1.1]);
График этого сигнала показан на рис. 9.16.
 Рис. 9.16
Рис. 9.16
Нестационарный линейный фильтр описывается следующими рекуррентными соотношениями:
 (9.3)
(9.3)
Этот фильтр может быть представлен в системе MATLAB следующим образом:
steps1 = length(time1);
[Y1,state] = filter([1 –0.5],1,R(1:steps1));
steps2 = length(time2);
Y2 = filter([0.9 –0.6],1,R((1:steps2) + steps1),state);
Y = [Y1 Y2];
plot(time,Y)
График сигнала на выходе этого фильтра показан на рис. 9.17.
 Рис. 9.17
Рис. 9.17
Определим такую обучающую последовательность: в качестве целевого выхода T примем массив Y, а входную последовательность P зададим на основе текущего и предшествующего значений входа R. Для использования алгоритмов адаптации представим обучающие последовательности в виде массивов ячеек:
T = con2seq(Y);
P = con2seq(R);
Инициализация сети
Сеть создается с помощью функции newlin, которая генерирует веса и смещение для линейного нейрона с двумя входами. На входе сети используется линия задержки на 1 такт; параметр скорости настройки принят равным 0.5.
lr = 0.5;
delays = [0 1];
net = newlin(minmax(cat(2,P{:})),1,delays,lr);
[net,a,e] = adapt(net,P,T);
Сформированная нейронная сеть имеет следующие весовые коэффициенты и смещение:
net.IW{1}, net.b
ans = 0.9 –0.6
ans = –3.14e–013
Нетрудно убедиться, что они соответствуют коэффициентам второго фильтра.
Проверка сети
Построим график погрешности сети (рис.9.18):
plot(time, cat(2,e{:}))
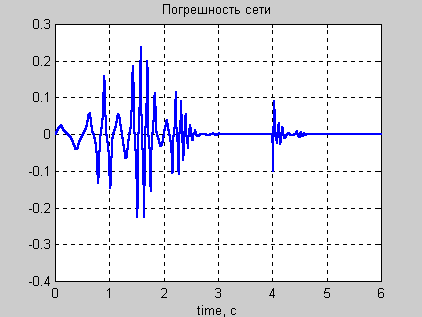 Рис. 9.18
Рис. 9.18
Из анализа этого графика следует, что сети требуется 2.5 с для настройки на реакцию первого фильтра и немногим более 0.2 с для настройки на реакцию второго фильтра. Это объясняется тем, что фактические настройки параметров сети стационарны и соответствуют значениям параметров второго фильтра.
Читатель может обратиться к демонстрационному примеру applin4, где исследуется подобная задача.
9.2. Распознавание образов
Часто полезно иметь устройство, которое выполняет распознавание образов. В частности, очень эффективны и выгодны машины, которые могут читать символы. Машина, которая читает банковские чеки, может выполнять за то же самое время намного больше проверок, чем человек. Этот вид приложений сохраняет время и деньги, а также устраняет условия, при которых человек выполняет монотонную, периодически повторяющуюся работу. Демонстрационная программа сценарий appcr1иллюстрирует, как распознавание символов может быть выполнено в сети с обратным распространением.
Постановка задачи
Требуется создать нейронную сеть для распознавания 26 символов латинского алфавита. В качестве датчика предполагается использовать систему распознавания, которая выполняет оцифровку каждого символа, находящегося в поле зрения. В результате каждый символ будет представлен шаблоном размера 57. Например, символ A может быть представлен, как это показано на рис. 9.19,а и б.
-

а
б
0
0
1
0
0
0
1
0
1
0
0
1
0
1
0
1
0
0
0
1
1
1
1
1
1
1
0
0
0
1
1
0
0
0
1
Рис. 9.19
Однако система считывания символов обычно работает неидеально и отдельные элементы символов могут оказаться искаженными (рис. 9.20).
 Рис. 9.20
Рис. 9.20
Проектируемая нейронная сеть должна точно распознавать идеальные векторы входа и с максимальной точностью воспроизводить зашумленные векторы. М-функция prprob определяет 26 векторов входа, каждый из которых содержит 35 элементов, этот массив называется алфавитом. М-функция формирует выходные переменные alphabet и targets, которые определяют массивы алфавита и целевых векторов. Массив targets определяется как eye(26). Для того чтобы восстановить шаблон для i-й буквы алфавита, надо выполнить следующие операторы:
[alphabet, targets] = prprob;
ti = alphabet(:, i);
letter{i} = reshape(ti, 5, 7)';
letter{i}
Пример:
Определим шаблон для символа A, который является первым элементом алфавита:
[alphabet, targets] = prprob;
i = 2;
ti = alphabet(:, i);
letter{i} = reshape(ti, 5, 7)';
letter{i}
ans =
0 0 1 0 0
0 1 0 1 0
0 1 0 1 0
1 0 0 0 1
1 1 1 1 1
1 0 0 0 1
1 0 0 0 1